本文主要是介绍BLDC电机FOC调试入门1,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
一、无感和有感
有感是指:电机内部有霍尔传感器感应转子的状态和位置
无感是指:电机内部是通过电调反电动势信号判断转子位置换相。
有感电机在静止的状态下就能知道转子的位置,无感电机需要转动起来才能判断转子的位置因此起步的时候会抖,而且低速状态下比较难控制。
二、FOC
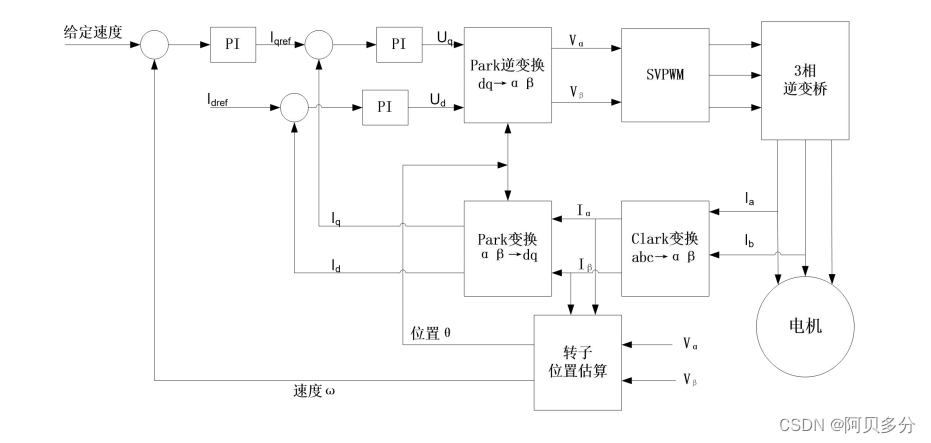
FOC(Field Oriented Control)磁场定向控制也叫矢量控制,是通过控制内部变频器输出的电压幅值和频率控制三相电流的变频驱动控制方法。
FOC 模块包含角度估算器,PI 控制器,坐标转换模块,电流采样模块和 PWM 波形输出模块, 可硬件实现电流闭环。角度估算器利用电机电流信号估算转子位置,实现基于无感 FOC 的电机控制。 也可通过 MCU 处理位置传感器信号获取转子位置,实现基于有感 FOC 的电机控制。
FOC的实质其实就是用坐标变换将三相静止坐标系的电流变换成磁轴线静止的旋转坐标系上。通过控制旋转坐标系度矢量大小和方向控制电机。
电机定子上的电压量、电流量、电动势都是交流量,并且都以同步转速在空间上不断旋转,导致算法难以控制。通过坐标变换,旋转同步旋转矢量变换成静止矢量,电压量和电流量变成直流量。再根据转矩公式,找出转矩和旋转坐标系上的被控制量之间关系,实时计算和控制转矩所需的直流给定量。
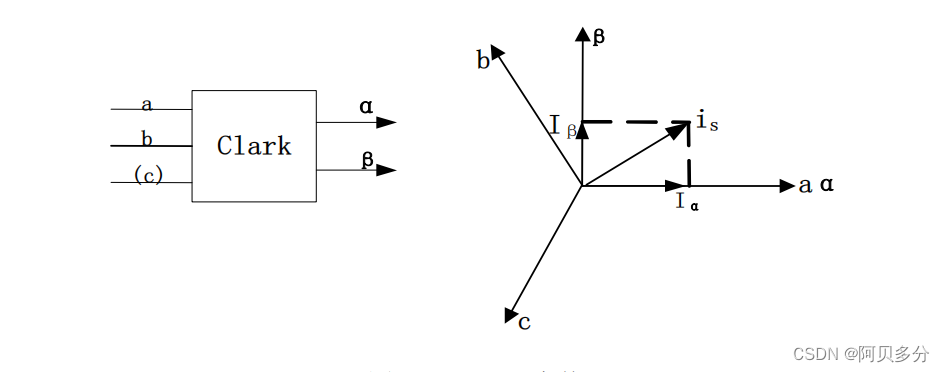
①Clark变换
测量出电机三相定子电流Ia,Ib,将三相电流通过Clark变换成两相电流Iα、Iβ,两个是相互正交的时变电流值。
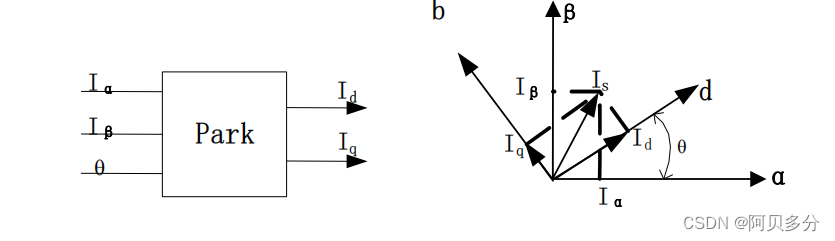
②Park变换
两相电流Iα、Iβ通过Park变换成旋转坐标系下相互正交的电流Id、Iq。在稳态情况下Id、和Iq是常量。
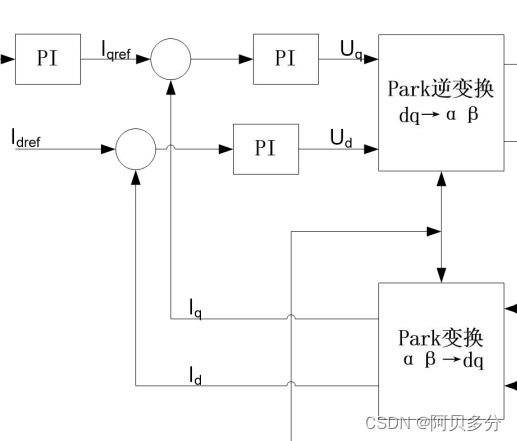
③施加到电机上的电压矢量
Iqref参考值控制转子磁通,Idref参考值控制电机的扭矩输出。Iq、Id实际值和Iqref、Idref参考值比较得到电流环PI控制器的输入。调节PI控制器的参数,得到要施加到电机上的电压矢量Uq和Ud。
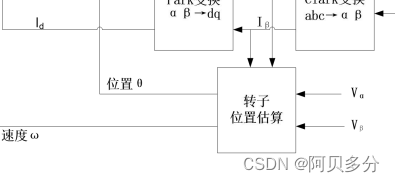
④转子位置估算
输入Vα、Vβ以及Iα、Iβ,通过转子位置估算算法估算出新的电机角度 θ 和转速 w 。新电机角度 θ 告知FOC算法下一个电压矢量在何处。计算出新的电机转速 w 与给定值进行比较得到误差,误差经过速度环 PI调节器 输出 Iqref 参考值。
⑤产生PWM
通过使用新的电机角度 θ ,Uq和Ud经过 park逆变换 到两相静止坐标系上。该计算将产生下一个真交电压值Vα、Vβ。再采用SVPWM算法判定其合成的电压矢量位于哪个扇区,计算出三相各桥臂开关管的导通时间。最后经过三相逆变器驱动模块输出电机所需的三相电压。
这篇关于BLDC电机FOC调试入门1的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








