本文主要是介绍永磁同步电机无感FOC(龙伯格观测器)算法技术总结-仿真篇,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
文章目录
- 1、观测器的引入
- 2、β轴向下的电机观测器数学模型
- 3、β轴向下的转子点角度及速度观测
- 4、Simulink仿真模型搭建
- 4.1模型总览
- 4.2 Luenberger观测器模块
- 4.2.1 I_alpha观测
- 4.2.2 I_beta观测
- 4.2.3 e_alpha、e_beta观测
- 4.2.4 锁相环
- 4.3 速度设定
- 4.4 速度观测结果
- 4.5 电角度观测结果
模型下载地址:无感FOC龙伯格观测器+PLL仿真模型
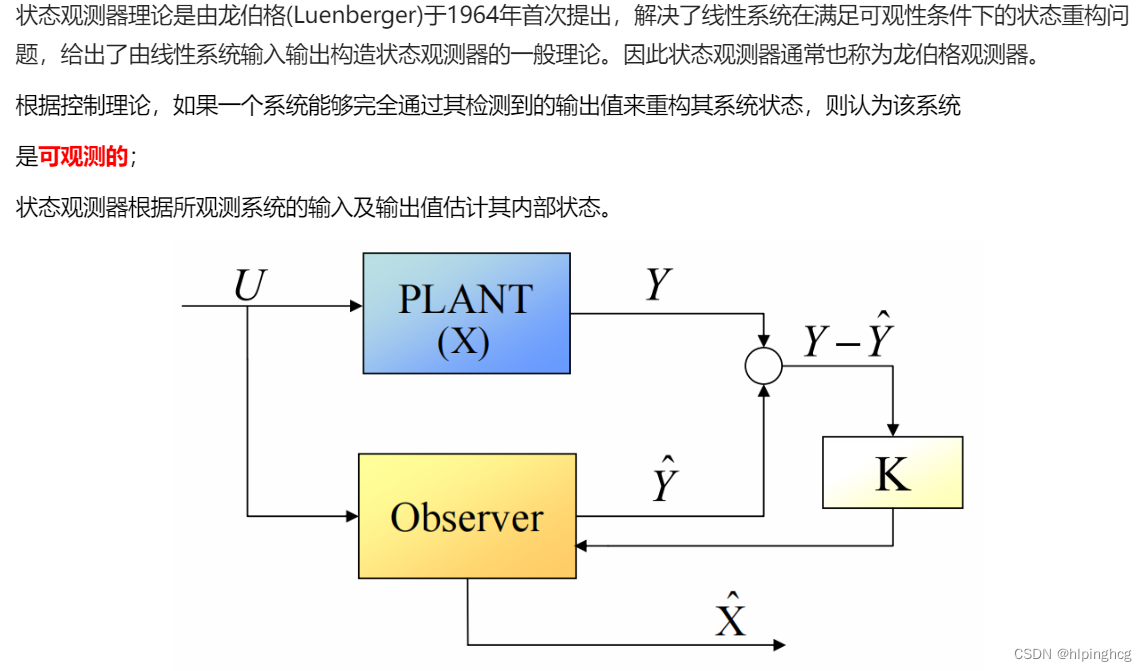
1、观测器的引入
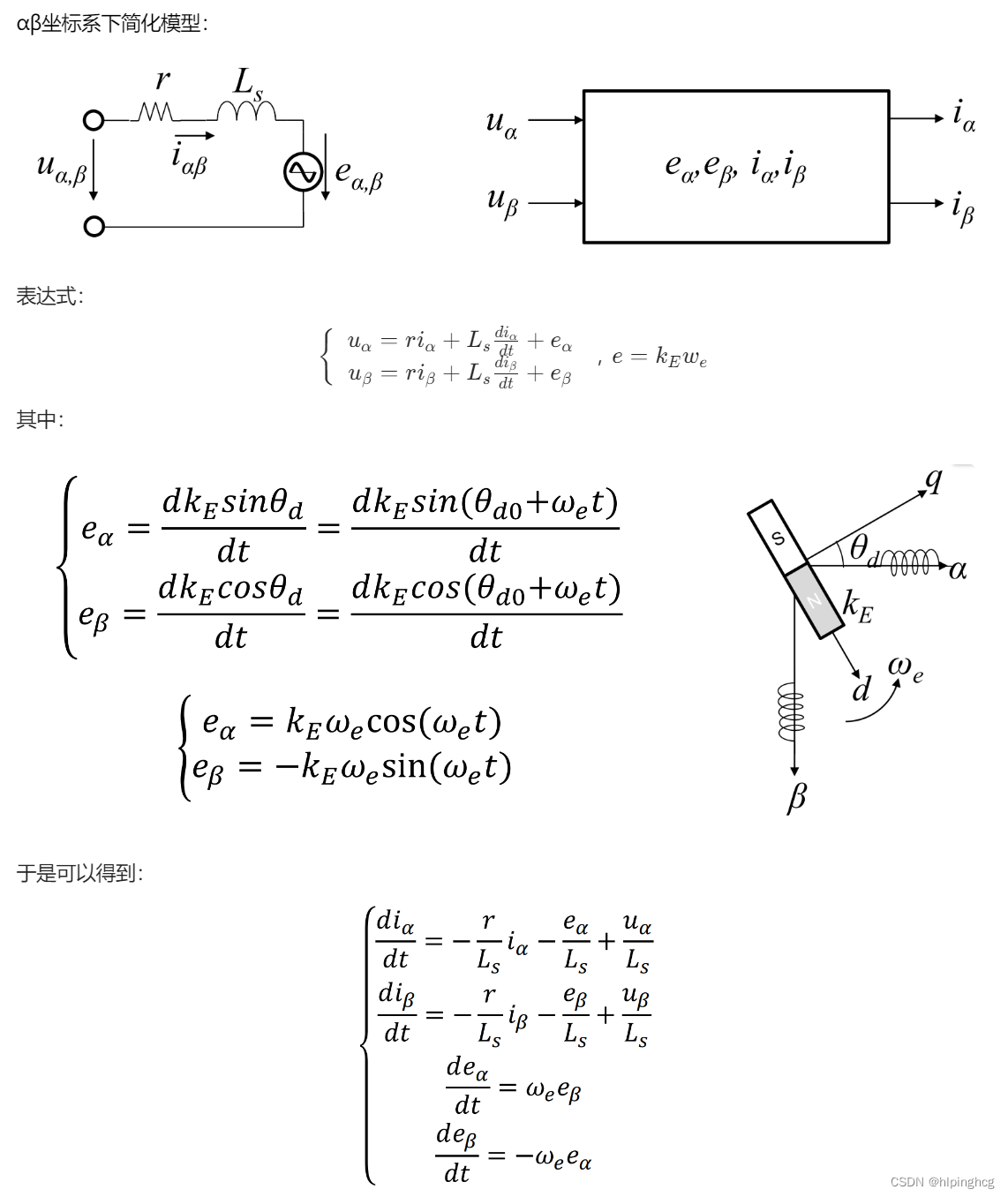
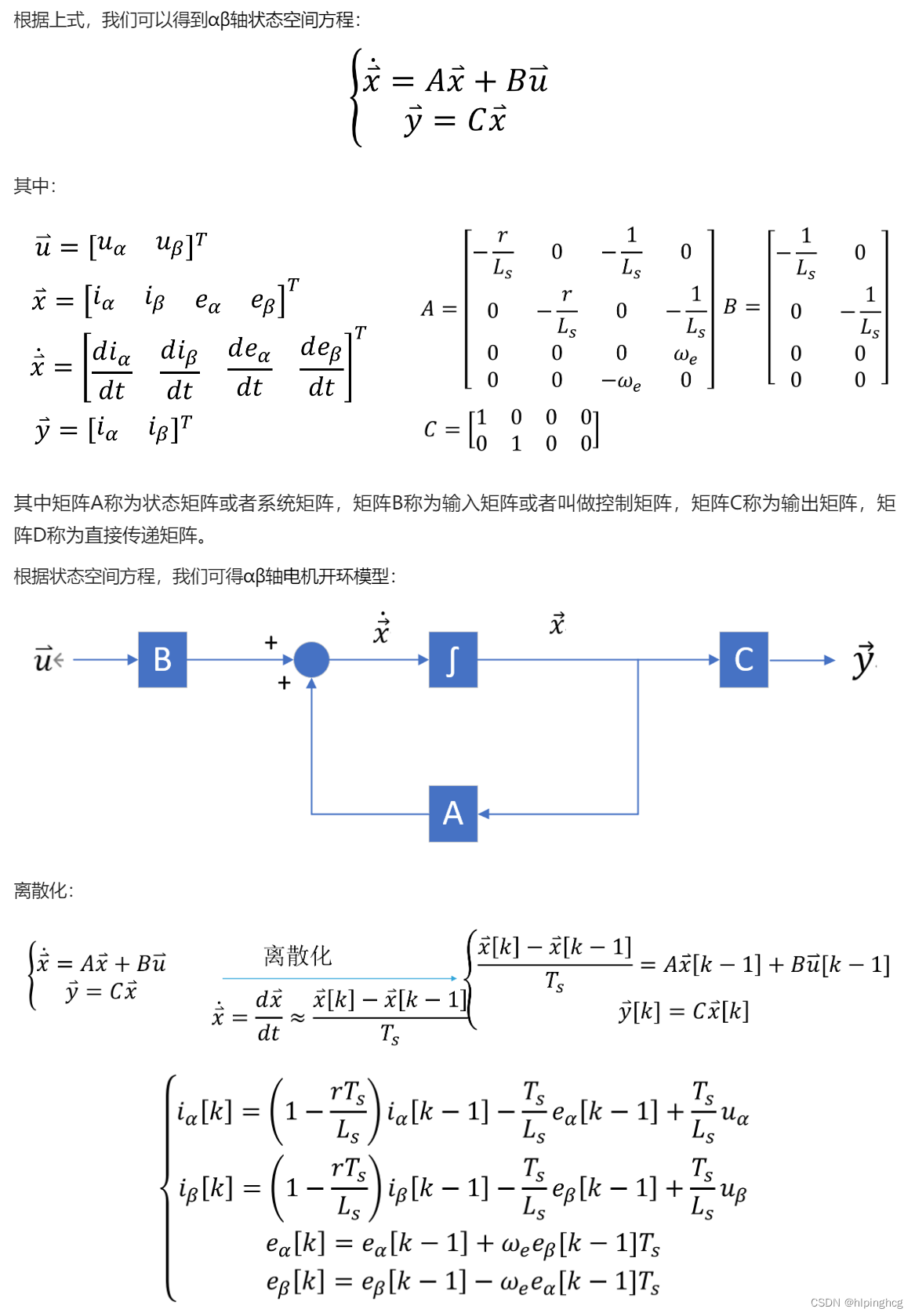
2、β轴向下的电机观测器数学模型
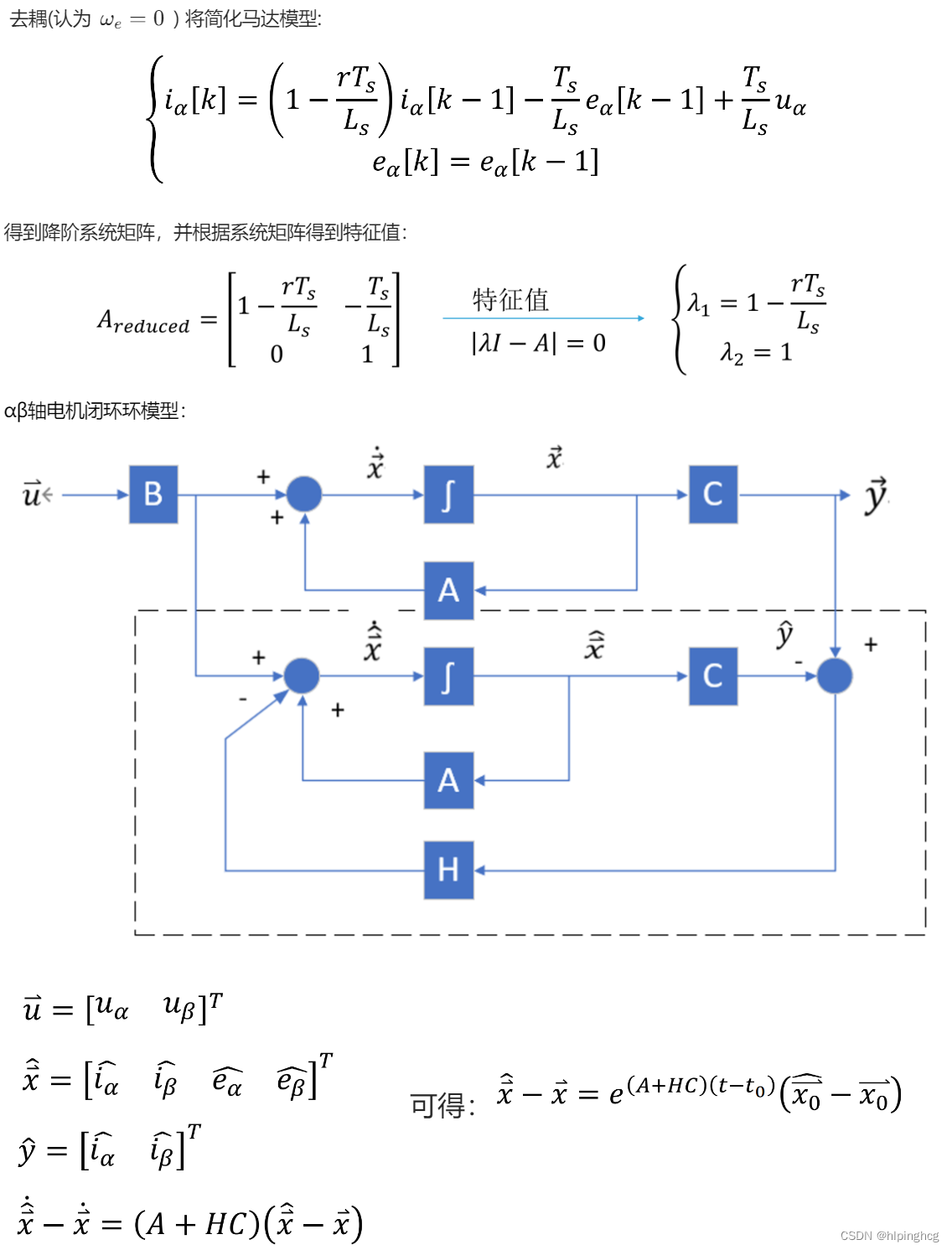
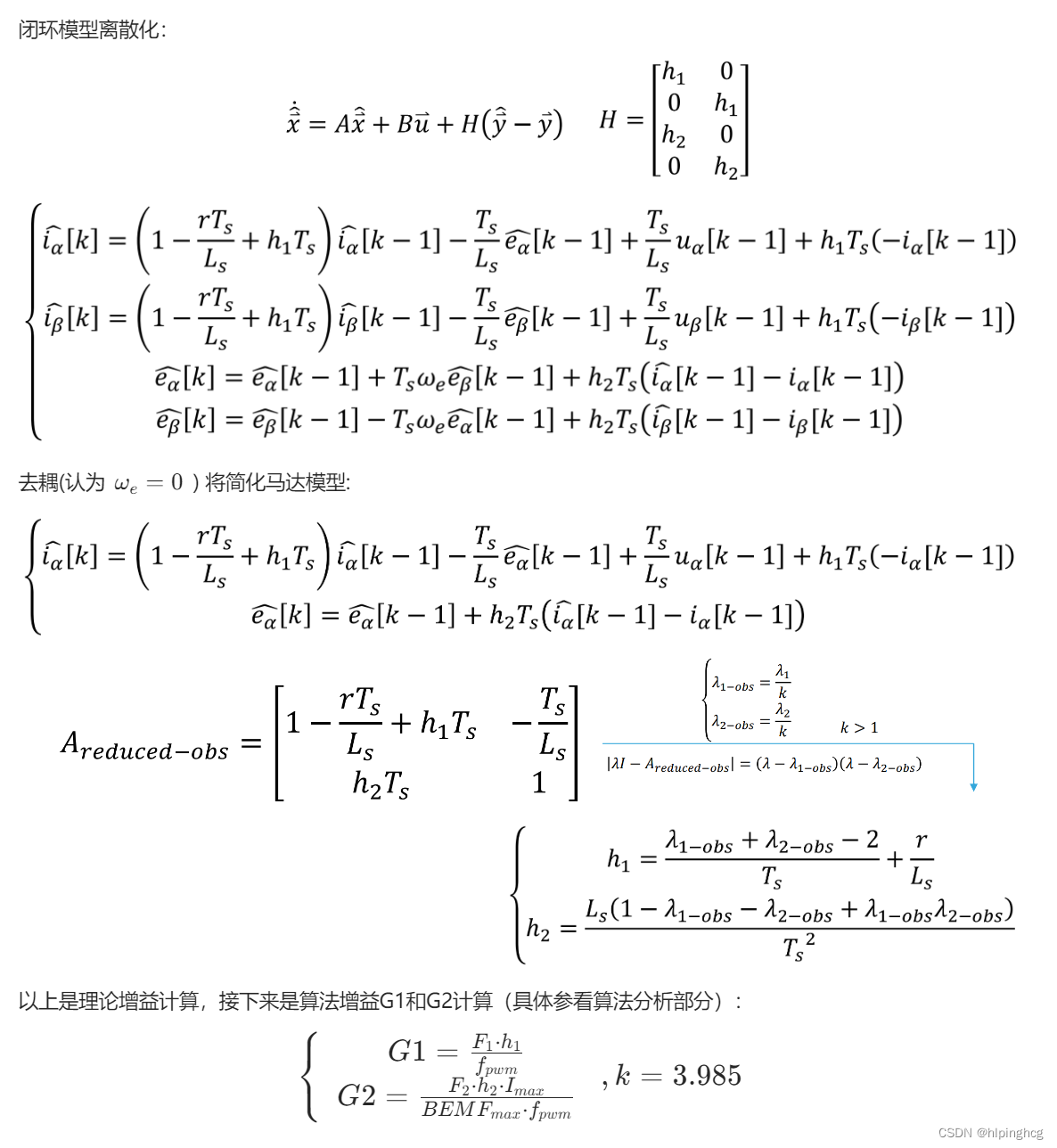
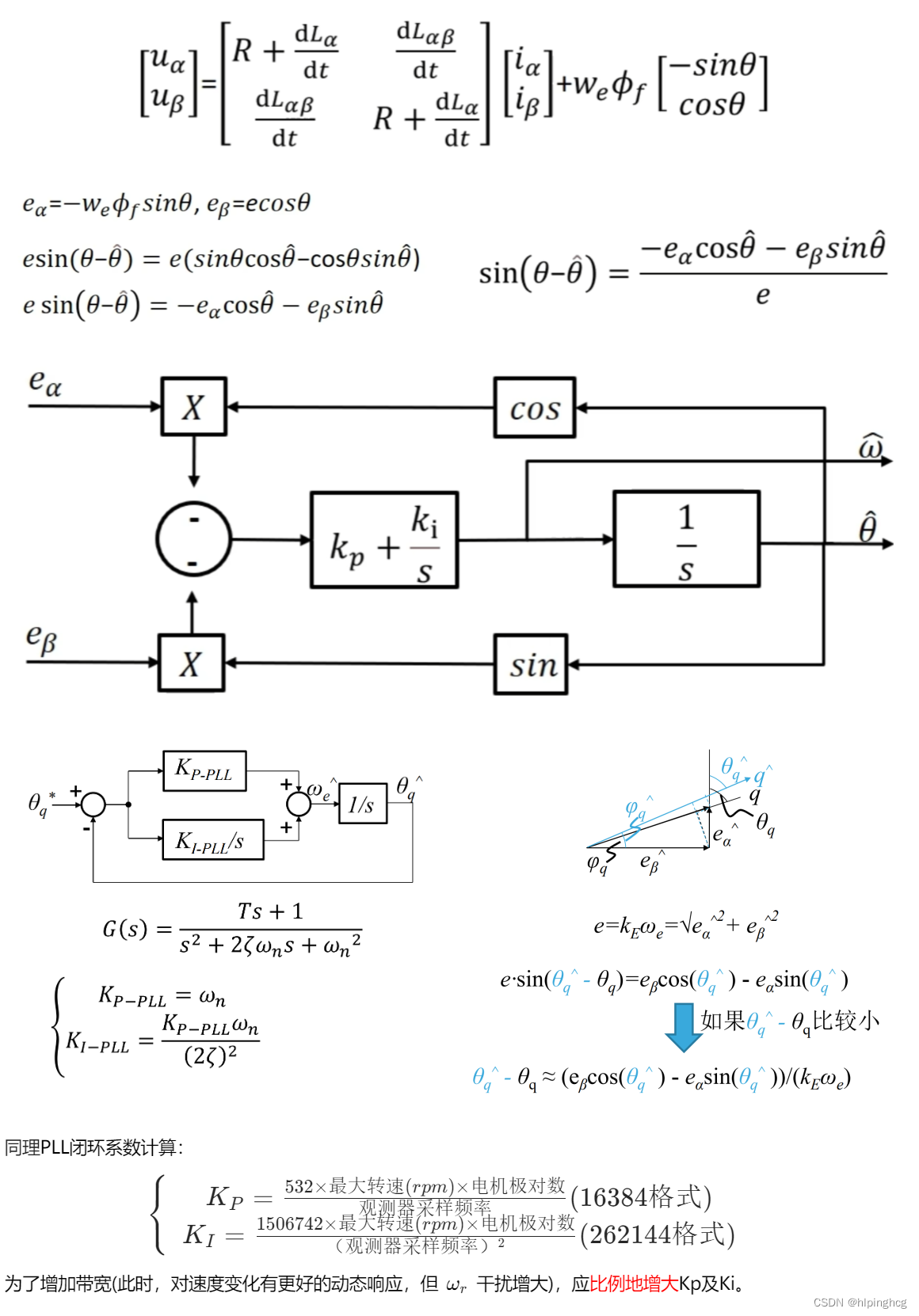
3、β轴向下的转子点角度及速度观测
4、Simulink仿真模型搭建
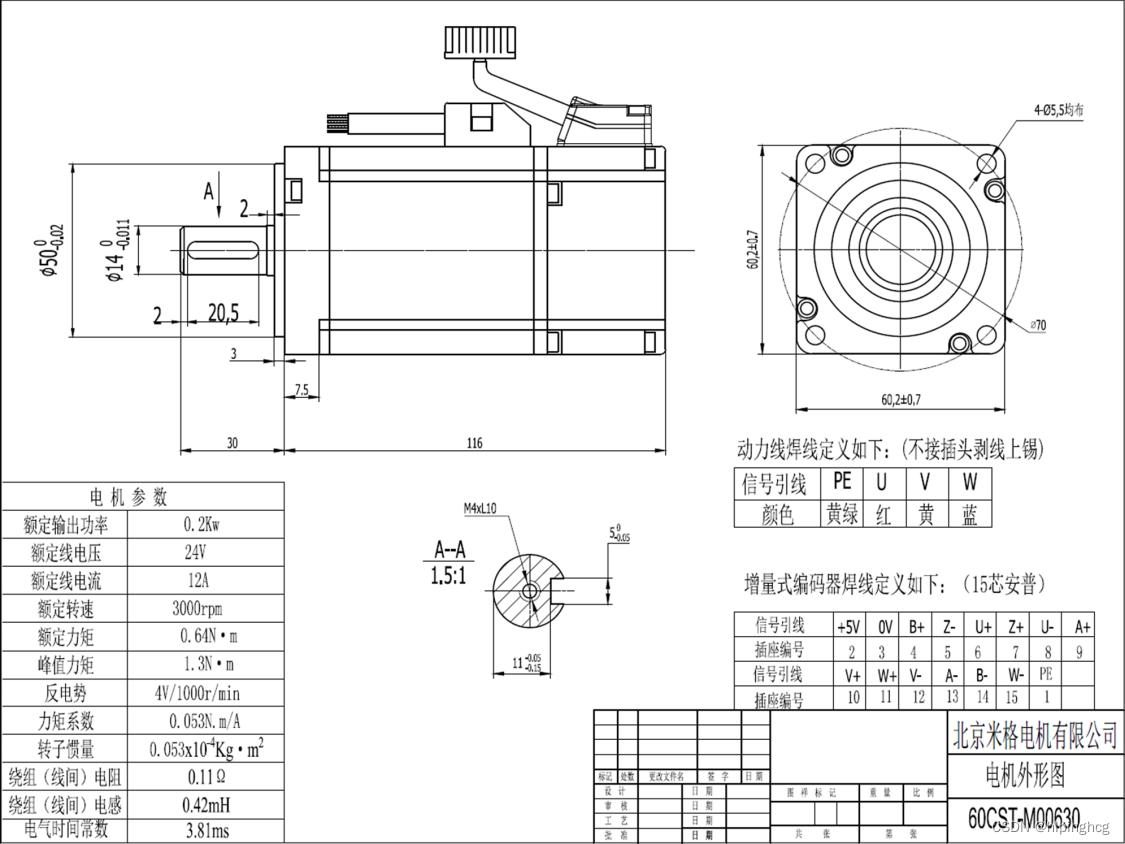
电机参数:
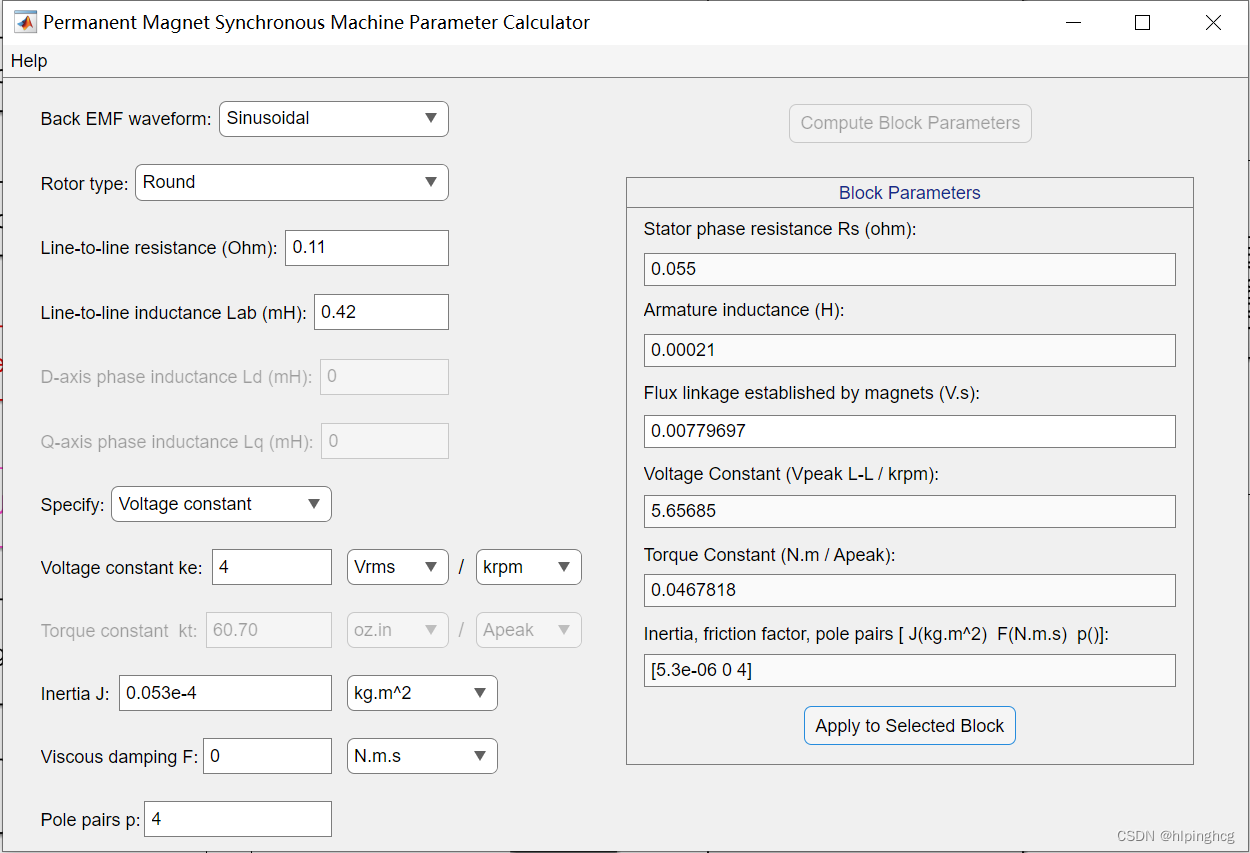
使用Permanent Magnet Synchronous Machine模块参数初步计算:
计算参数脚本:
function fcn()%4V/1000rpm
r=0.055;
Ls=0.00021;
Ts=0.0001;
Ke=4/1000;
pole=4;
J=0.053e-4;
max_speed=3000;%由反电动势常数计算磁链
flux=10*sqrt(6)*Ke/(pi*pole);
% r : 欧姆
% LS:H%电流环PI计算
wc=2*pi*r/Ls;
kcp=wc*Ls;
kci=wc*r;%速度环PI计算
wn=wc/10;
kvp=wn*J/(1.5*pole*flux);
kvi=wn*kvp;%观测器增益计算
l1=1-r*Ts/Ls;
l2=1;
%K>1
k=3.985;L1_obs=l1/k;
L2_obs=l2/k;h1=(L1_obs+L2_obs-2)/Ts+r/Ls;
h2=Ls*(1-L1_obs-L2_obs+L1_obs*L2_obs)/(Ts*Ts);%ST WB观测器增益计算
max_current=3.268;
max_bemf_voltage=1.2*sqrt(2)*max_speed*Ke/sqrt(3);
F1=4096;
F2=16384;
G1=F1*h1*Ts;
G2=F2*h2*max_current*Ts/(max_bemf_voltage);%PLL增益计算
kpp=532*max_speed*pole/(1/Ts);
kpi=(1506742*max_speed*pole/((1/Ts)^2))/4;%求k
k1=-14785;
f=(2-r*Ts/Ls)/(k1*Ts-r*Ts/Ls+2);
str='f value is: ';
str=[str,num2str(f)];
disp(str);%数据打印
str='flux value is: ';
str=[str,num2str(flux)];
disp(str);str='wc value is: ';
str=[str,num2str(wc)];
disp(str);str='kcp value is: ';
str=[str,num2str(kcp)];
disp(str);str='kci value is: ';
str=[str,num2str(kci)];
disp(str);str='wn value is: ';
str=[str,num2str(wn)];
disp(str);str='kvp value is: ';
str=[str,num2str(kvp)];
disp(str);str='kvi value is: ';
str=[str,num2str(kvi)];
disp(str);str='h1 value is: ';
str=[str,num2str(h1)];
disp(str);str='h2 value is: ';
str=[str,num2str(h2)];
disp(str);str='G1 value is: ';
str=[str,num2str(G1)];
disp(str);str='G2 value is: ';
str=[str,num2str(G2)];
disp(str);str='kpp value is: ';
str=[str,num2str(kpp)];
disp(str);str='kpi value is: ';
str=[str,num2str(kpi)];
disp(str);
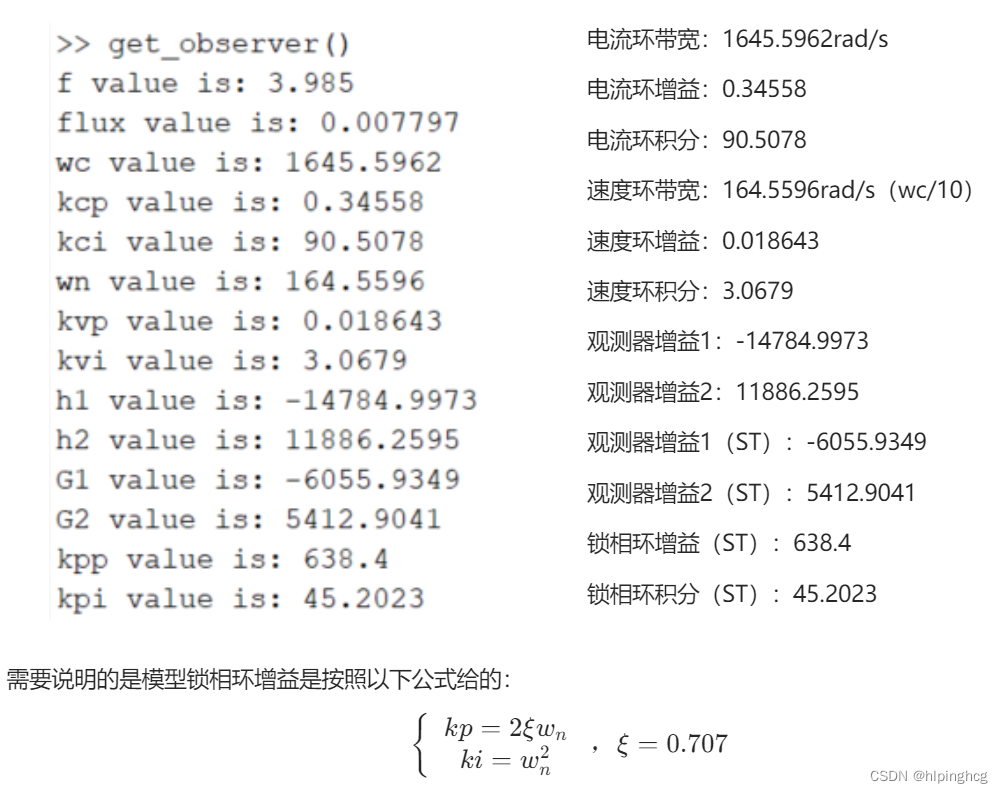
计算结果:
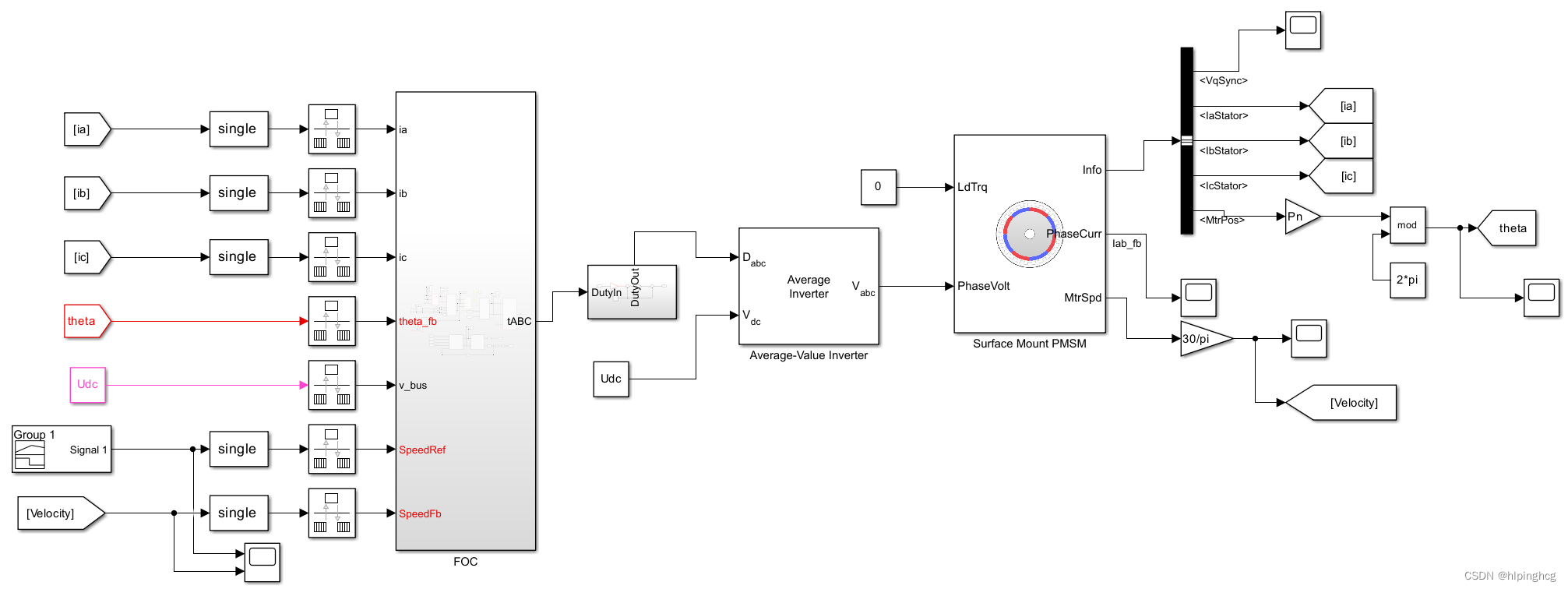
4.1模型总览
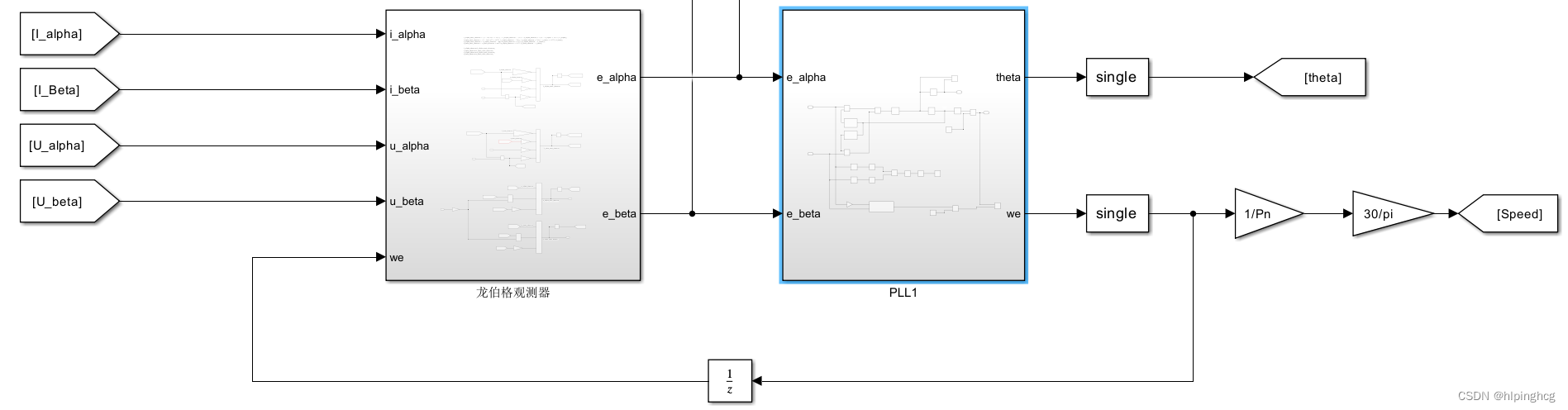
4.2 Luenberger观测器模块
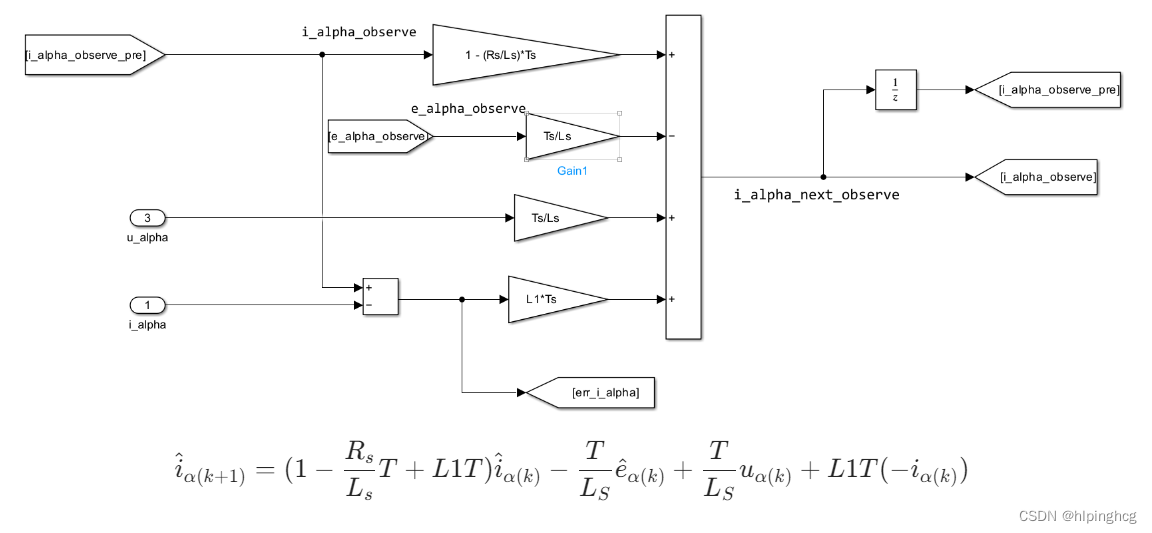
4.2.1 I_alpha观测
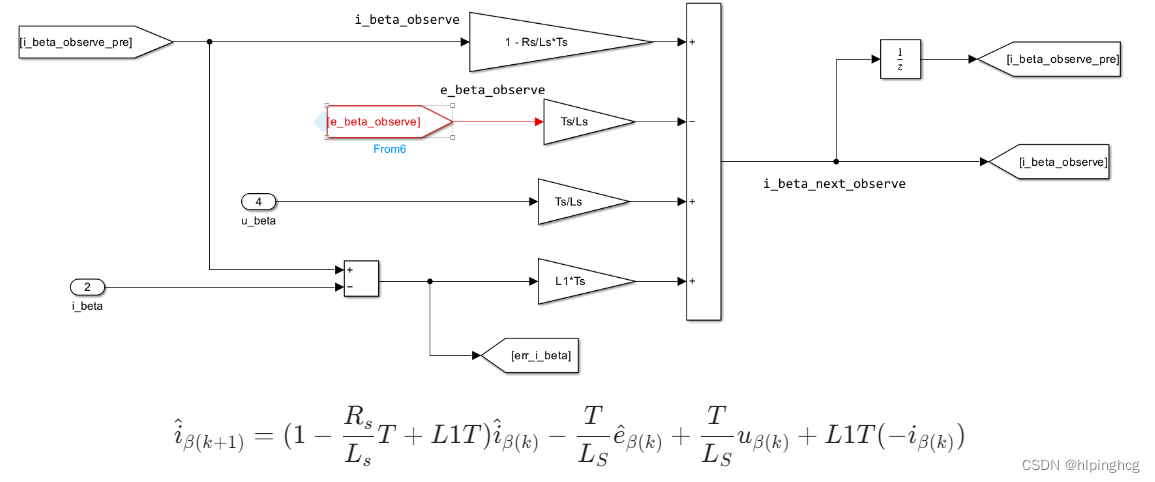
4.2.2 I_beta观测
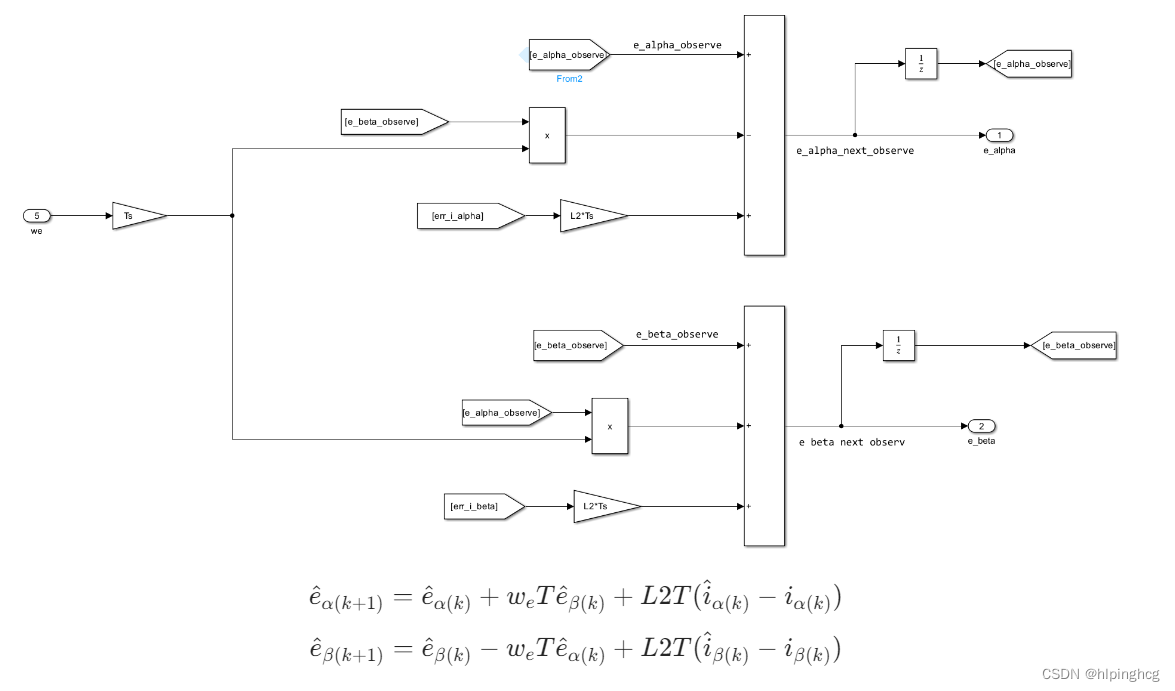
4.2.3 e_alpha、e_beta观测
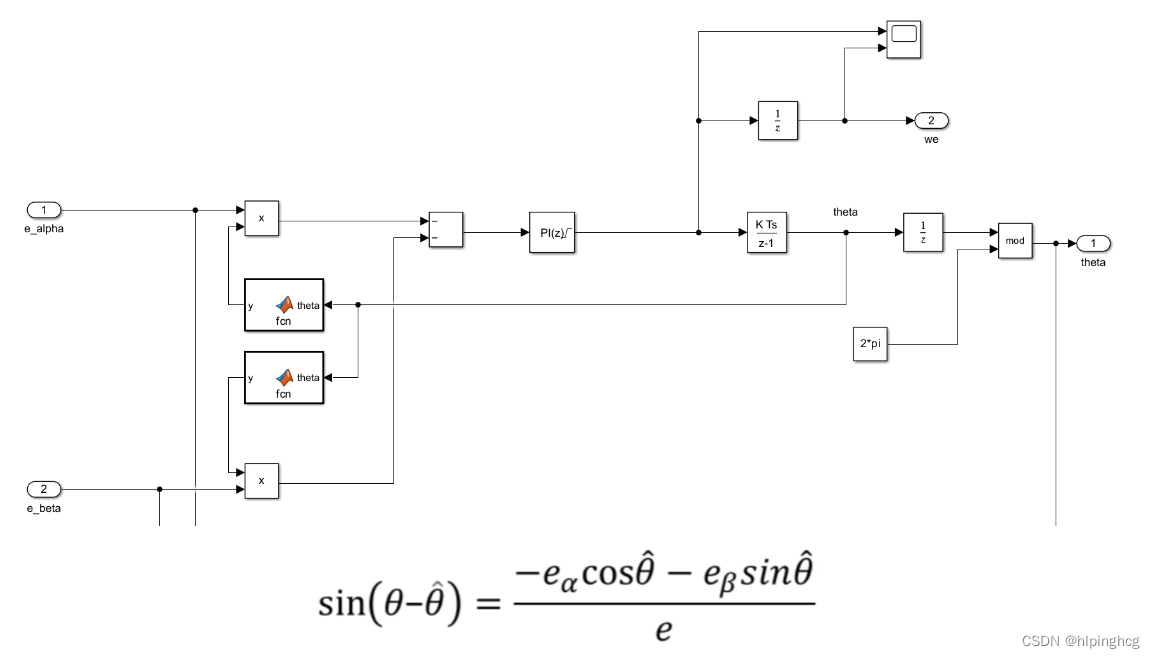
4.2.4 锁相环
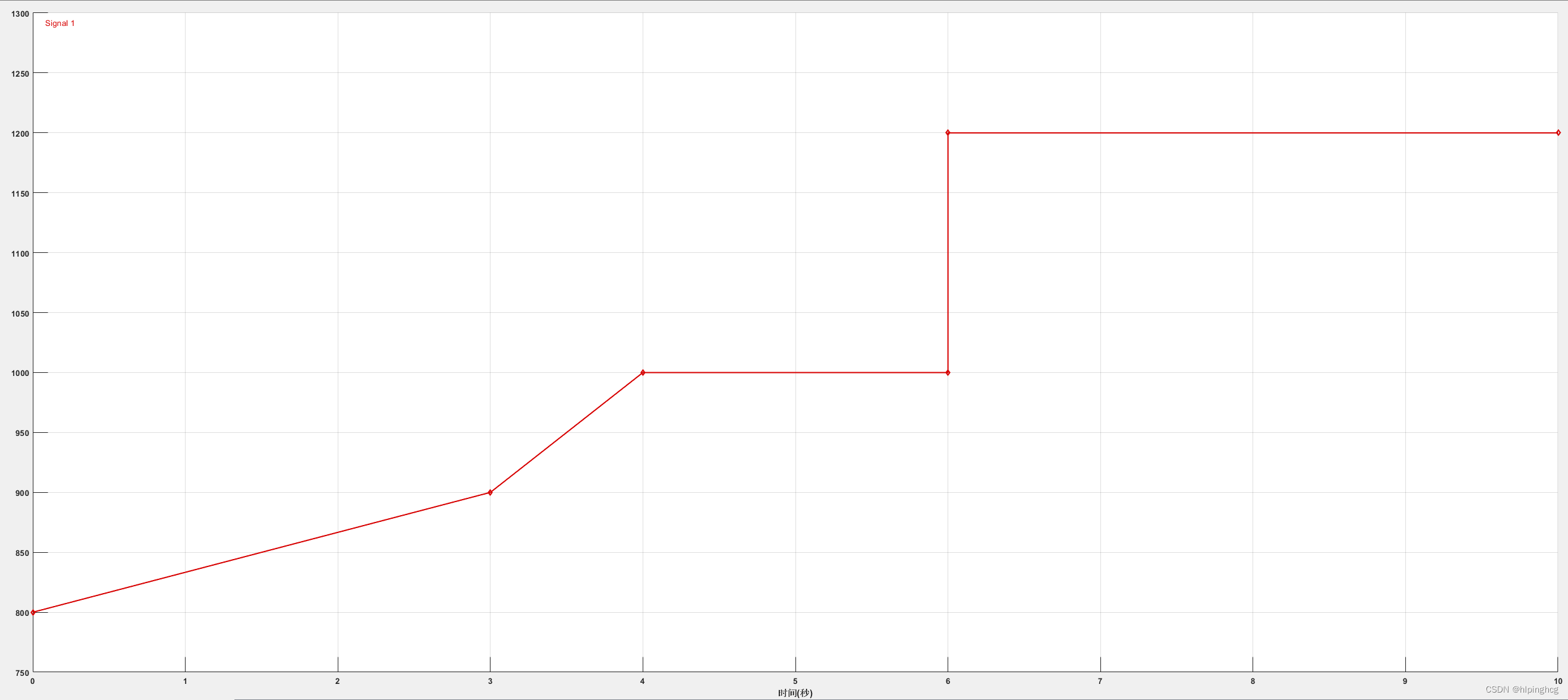
4.3 速度设定
4.4 速度观测结果
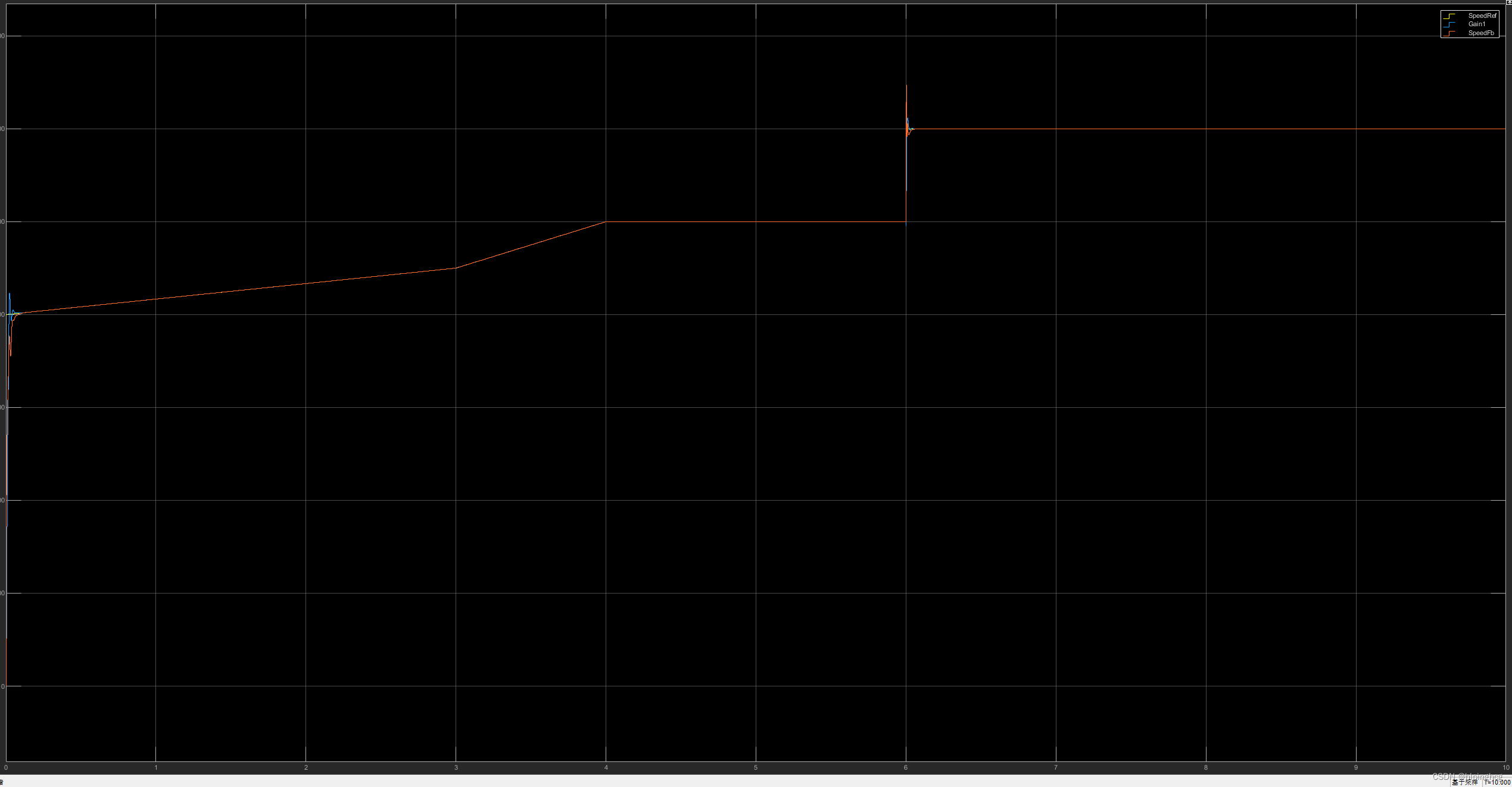
其中蓝色部分为观测速度,其基本和测量速度以及设定速度重合。
4.5 电角度观测结果
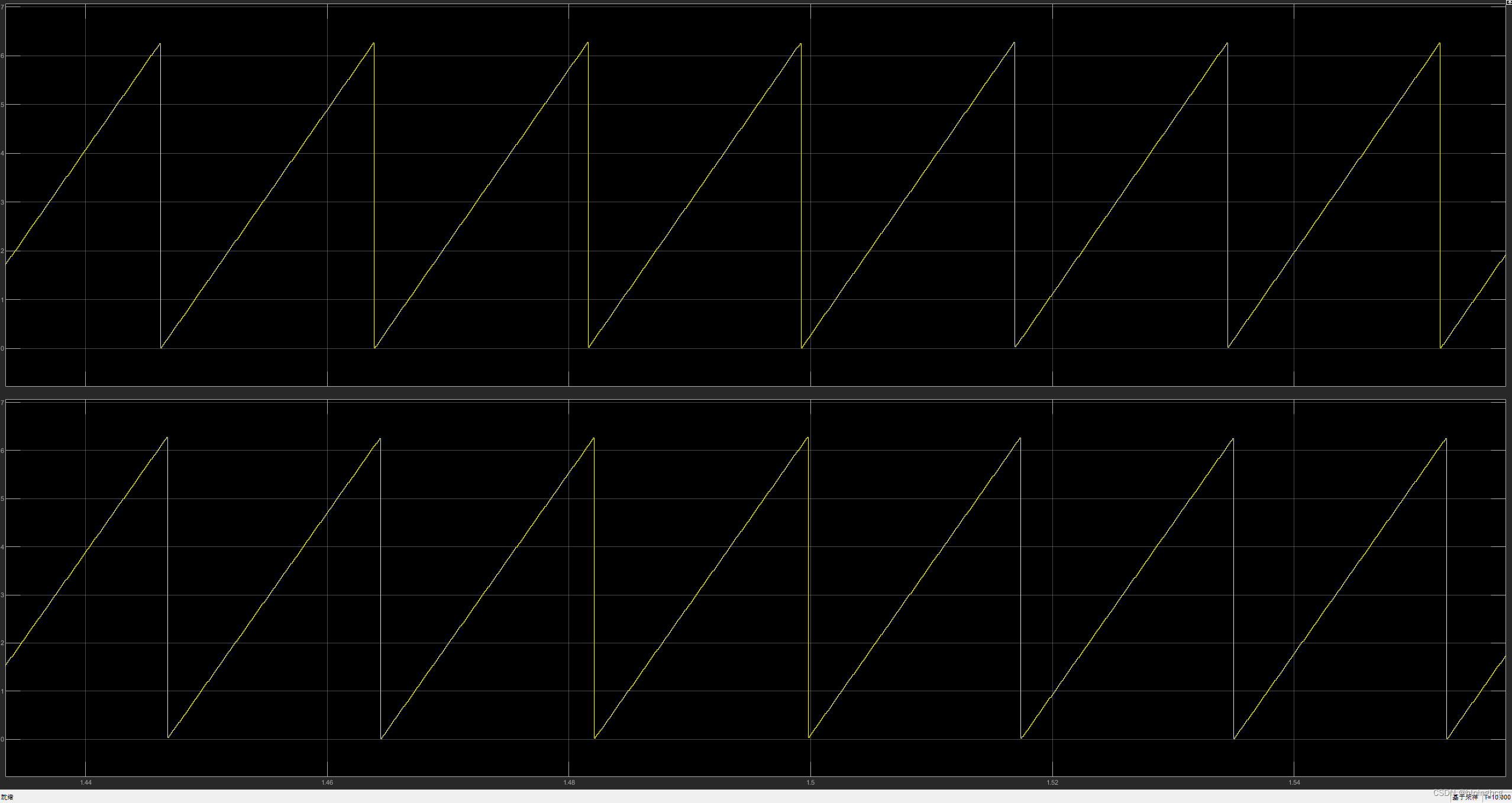
观测角度和测量角度一致。
这篇关于永磁同步电机无感FOC(龙伯格观测器)算法技术总结-仿真篇的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







