无感专题

OpenHarmony鸿蒙开发( Beta5.0)无感配网详解
1、简介 无感配网是指在设备联网过程中无需输入热点相关账号信息,即可快速实现设备配网,是一种兼顾高效性、可靠性和安全性的配网方式。 2、配网原理 2.1 通信原理 手机和智能设备之间的信息传递,利用特有的NAN协议实现。利用手机和智能设备之间的WiFi 感知订阅、发布能力,实现了数字管家应用和设备之间的发现。在完成设备间的认证和响应后,即可发送相关配网数据。同时还支持与常规Sof

分布式数据库系统环境的“无感”升级
导读 本文聚焦于杭州银行在数字化转型背景下,通过高可用机制实现关键业务系统“无感”升级的探索实践。随着金融行业加速线上化和移动化转型,业务系统的连续性要求显著提升,传统的数据库变更方式已无法满足新时期的需求。杭州银行基于 TiDB 分布式架构设计的新一代关键业务系统,通过节点冗余、数据副本、故障转移和负载均衡等机制,实现了系统的高可靠性与可维护性。 文章详细阐述了在这一架构下进行业务“无感”维
Electron无感打印 静默打印(vue3 + ts + vite)
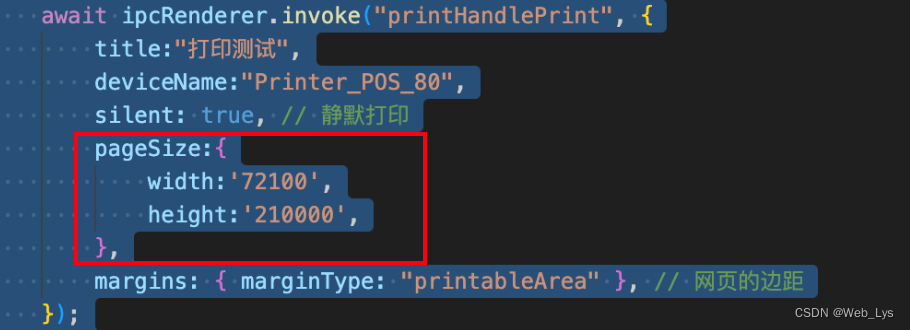
(electron vue3 项目搭建部分 自行查找其他资源 本文只讲解Electron+vue3 如何实现静默打印) 第一步获取打印机资源 渲染端代码(vue里面) // 因使用了vite所以在浏览器中打开 require会报错 只能在electron中const { ipcRenderer } = require( 'electron')// 初始化打印async function

token 无感刷新
什么是 token 无感刷新?为什么需要 token 无感刷新?让我们想象一下有这么个场景:你登录一个系统成功后,玩了 10 分钟,发现登录失效了,又要你重新登录,然后又过 10 分钟,又失效了,又要重新登录,难不难受,那这是怎么造成的?是因为权限 token 有效时间很短造成的,不要问,为什么权限 token 过期时间这么短,因为需要实现单点登录。那什么是单点登录呢?请参考单点登录模式。 在单

uniapp登录成功后跳回原有页面+无感刷新token
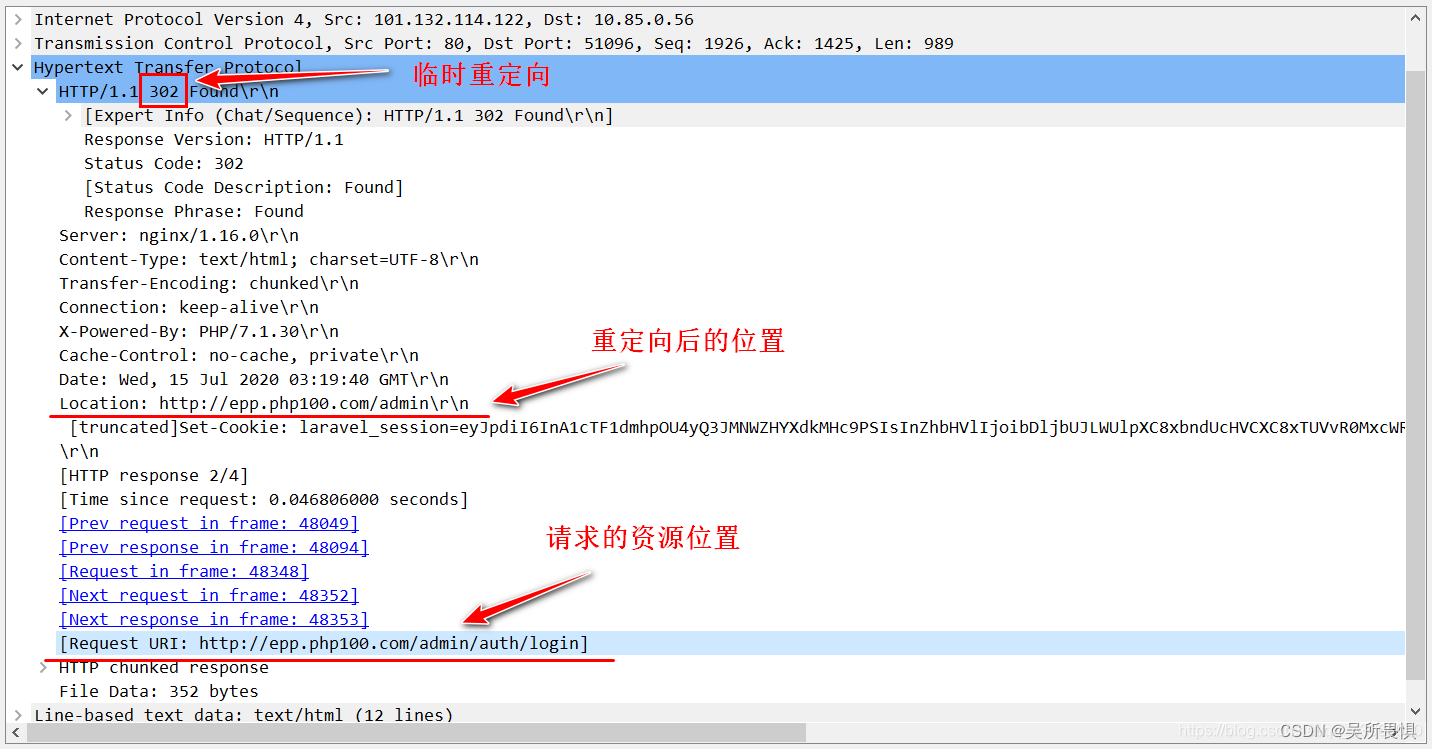
uniapp登录成功后跳回原有页面 引言 在C端的页面场景中,我们经常会有几种情况到登录页: 区分需要登录和不用登录的页面,点击需要登录才能查看的页面 已经登录但是超时,用户凭证失效等原因 以上情况可以细分为两种,一种是从未登录过的,需要第一次去登录,还一种是已经登录了,但是cookie失效了,需要重新获取用户凭证,这样的话后端会将两个状态码区分,那我们前端需要根据不同的状态码进行相应的

基于M0 MCU的无感FOC航模电机控制
基于从零启动的无感FOC控制方法,实现了航模电机的高动态响应控制。 使用某M0芯片,20k开关频率,采样和中断计算无法倍频,整个FOC计算时间不超过33us。48V供电,满载60A,瞬态90A。 使用20k开关频率,航模电机电角频率1300Hz,波形正弦度高。 调试过程中,电角频率1000Hz,尝试10k开关频率,依然能获得较高的波形正弦度。动态响应依然不错,当然因为开关频率只有10k,电流的

特价直销2.0KΩ无感电阻全新原装
无感电阻顾名思义,无感即是无感值的意思,当然这里的无,是指电阻上的感抗值非常小了,可以忽略不计,一般不能说是彻底没有。一些精密的仪器仪表设备,电子工业设备常常需要用到此类无感电阻,因为普通具有高感抗的电阻在使用中容易产生震荡,损坏回路中的其他器件。 无感电阻常用于做负载,用于吸收产品使用过程中产生的不需要的电量,或起到缓冲,制动的作用,此类电阻常称为制动电阻,负载电阻。另外对高精密电阻来说,产品中
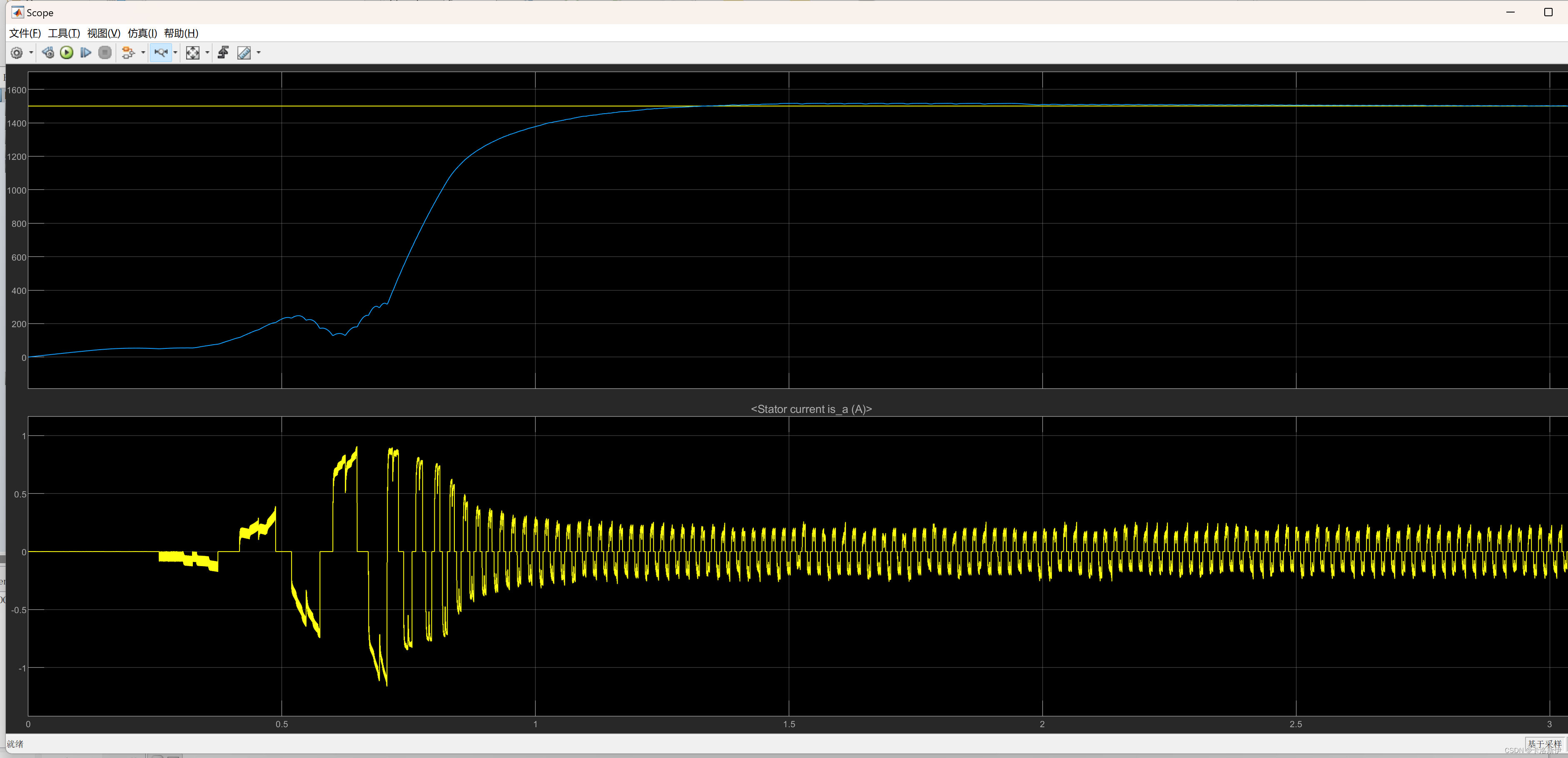
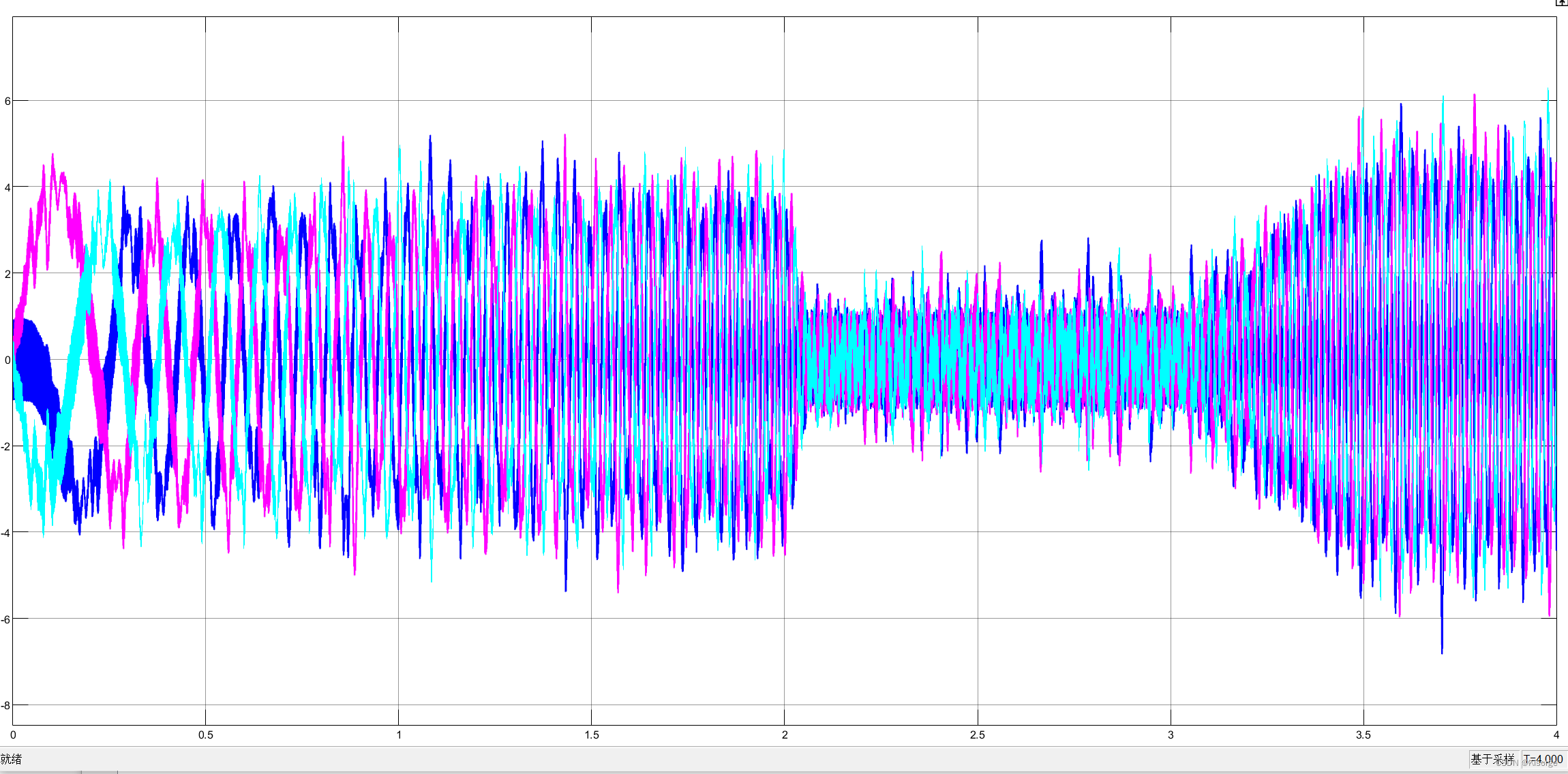
【电机控制】滑模观测器PMSM无感控制波形图
【电机控制】滑模观测器PMSM无感控制波形图 文章目录 前言一、FOC控制1.三相电流2.Clark变换静止坐标系iαiβ3.park变换旋转坐标系idiq4.电流环PI控制输出UdUq5.UdUq 反park变换UαUβ 二、反电动势观测器BEMF1.静止坐标系iαiβ提取反电动势EaEb2.反电动势EaEb提取位置信息、EqEd3.位置信息提取机械转速wr 总结
【在线OJ系统】自定义注解实现分布式ID无感自增
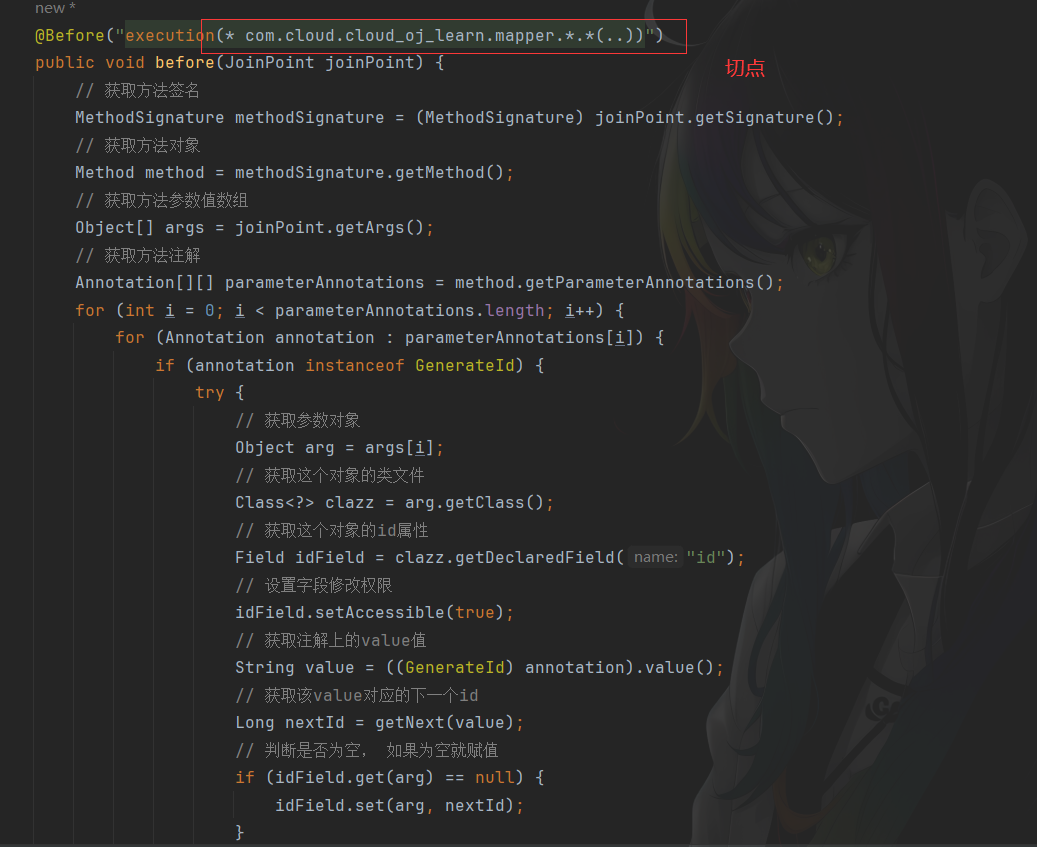
实现思路 首先自定义参数注解,然后根据AOP思想,找到该注解作用的切点,也就是mapper层对于mapper层的接口在执行前都会执行该aop操作:获取到对于的方法对象,根据方法对象获取参数列表,根据参数列表判断某个参数上是否加有自定义的注解,如果有则读取注解中的value值,并通过传入对象的引用拿到该对象,此时判断该对象的id值是否位空,如果为空则生成全局唯一id并赋值 代码实现 packa
永磁同步电机无感FOC模型参考自适应(MRAS)转速估计算法
文章目录 1、前言2、模型参考自适应控制(MRAS)的基本原理分析2.1 模型参考自适应系统的分类2.2 模型参考自适应系统的设计思路2.3 波波夫(PopoV)超稳定性理论 3、永磁同步电机无位置模型参考自适应系统模型分析3.1 参考模型与可调模型的确定3.2 参考自适应律的确定3.3 仿真3.3.1 核心模块(在滑膜观测器、龙伯格、非线性磁链观测器基础上修改)3.3.2 仿真效果 参考
cookie,sessionStorage,localStorage的区别及应用场景、http状态码含义、使用token登录、无感登录
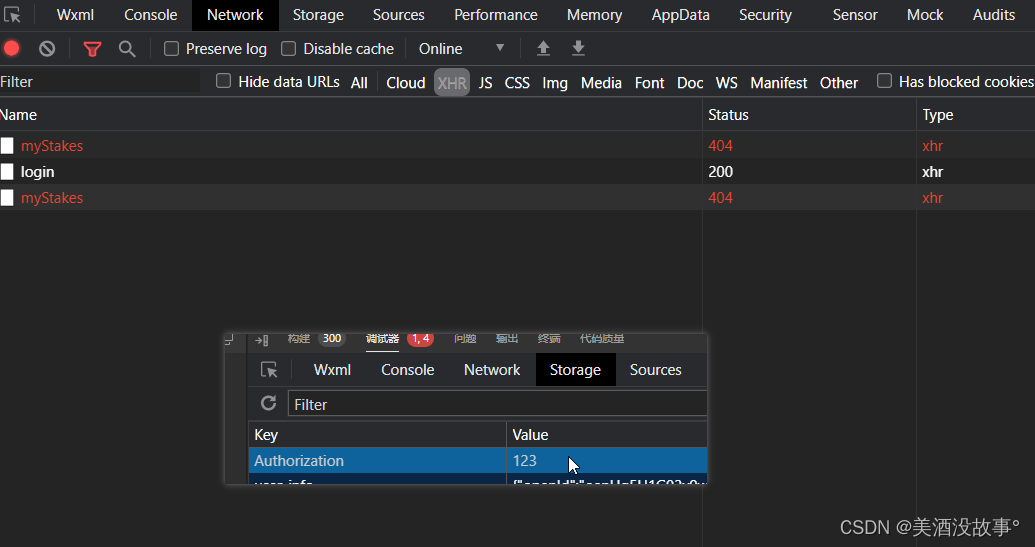
浏览器的缓存机制提供了可以将用户数据存储在客户端上的方式,可以利用cookie,session等跟服务端进行数据交互。 浏览器的存储方式有哪些? 1.cookiesH5标准前的本地存储方式兼容性好,请求头自带cookie存储量小,资源浪费,使用麻烦(封装)不能进行跨域,只能存储字符串2.localstorageH5加入的以键值对为标准的方式操作方便,永久存储,兼容性较好保存值的类型被限

电机无感算法采集电流的作用
电机无感算法中采集电流的作用是通过测量电机终端的电流,从中获得电机的状态信息,进而实现对电机旋转位置的估算。 采集电流的作用有以下几个方面: 电机模型建立:通过测量电流,可以获得电机的输入量和输出量之间的关系。利用这些采集到的电流数据,可以建立电机的数学模型,包括转矩方程、动态方程等。这一模型是电机无感算法的基础,用于进行电机状态估算和位置计算。 反电动势估算:采集电流可以帮助估算电机的反
STM32 Simulink 自动代码生成电机控制——无感六步方波仿真
目录 前言 无感控制理论 仿真 过零检测 反电动势采样 系统运行 编辑 总结 前言 STM32 Simulink 自动代码生成电机控制——霍尔有感六步方波仿真到开发板运行-CSDN博客 前面文章实现了有感方波控制再到开发板运行,关于无感方波控制的仿真已经在同一个模型里实现。在落实到硬件上还需要解决反电动势采样等问题,这里聊聊仿真。硬件实现有时间再考虑做。现
uniapp无感登录封装
全局请求封装 https://blog.csdn.net/qq_42618566/article/details/109308690 无感登录封装 import {http} from "./index.js"let requestsQueue = []; // 请求队列// 记录请求队列export function recordRequests(path, params, loadi
在vue前端开发中基于refreshToken和axios拦截器实现token的无感刷新
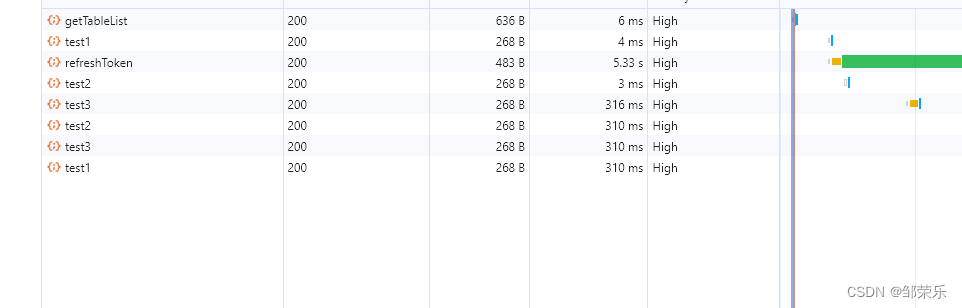
文章目录 一、需求背景二、token刷新的方案1、根据过期时间重新获取2、定时刷新token接口3、使用了RefreshToken 三、关于RefreshToken四、Refresh Token的优点五、Refresh Token的工作原理六、Refresh Token的使用流程七、Refresh Token的实现步骤1、登录成功后保存AccessToken,RefreshToken2、正常
token的无感刷新
Token的无感刷新通常通过以下步骤实现: 用户登录时,服务器生成一个访问令牌(Access Token)和一个刷新令牌(Refresh Token),并将其返回给客户端。 客户端在每个请求中携带访问令牌,以证明其身份。 当访问令牌过期时,客户端向服务器发送一个刷新令牌的请求。 服务器验证刷新令牌的有效性,并生成一个新的访问令牌和一个新的刷新令牌。新的访问令牌替换旧的访问令牌,并将新的刷
使用axios结合access_token和refresh_token进行无感刷新
这里利用到的主要是 axios 请求失败的config配置可以记住本次请求的参数,以及利用拦截器,等待刷新完后通过 axios(config) 再次发起请求。 小技巧:将每次请求失败的config和promise的resolve参数存放到数组中,等待刷新token完成再次请求 <script setup lang="ts">import { RouterLink, RouterView } f
项目可行性方案:人脸识别实现无感考勤的项目技术可行性方案
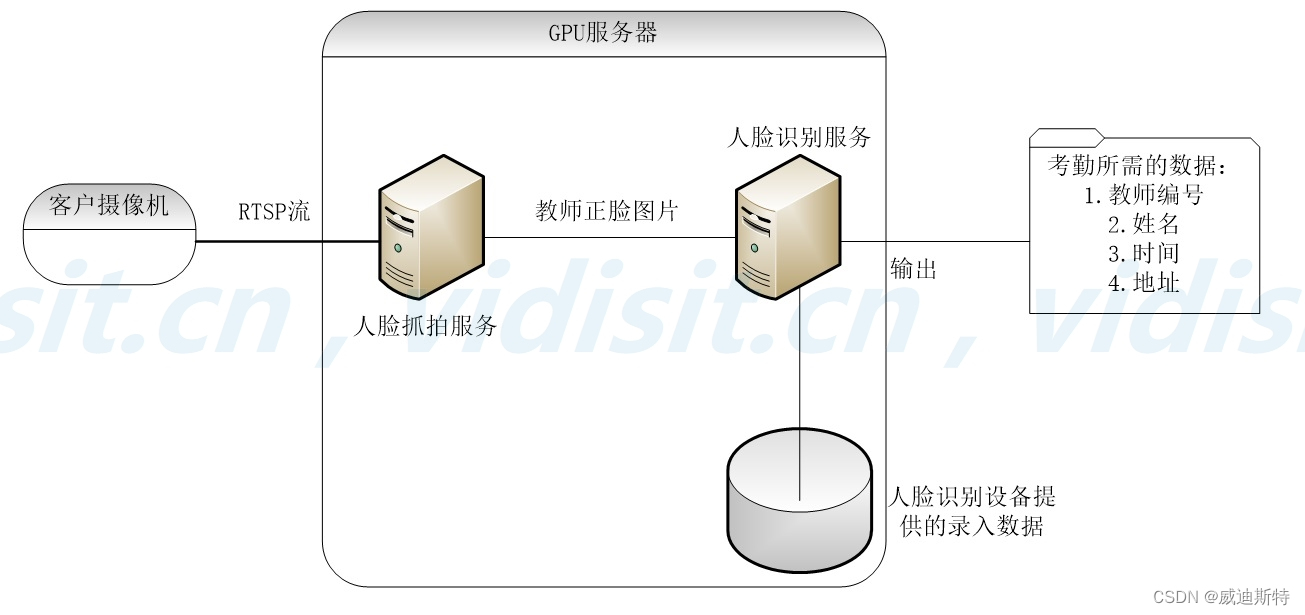
目 录 1.引言 1.1编写目的 1.2背景 2.可行性研究的前提 2.1要求 2.2目标 3.对现有系统的分析 3.1系统改进示意图 3.2改进之处 3.3技术条件方面的可行性 4.结论 1.引言 1.1编写目的 本报告编写的目的是探究学校里对教室和办公室内教师的人脸进行识别从而实现无感考勤的项目和技术可行性。 1.2背

【电机控制】PMSM无感FOC控制(三)SVPWM
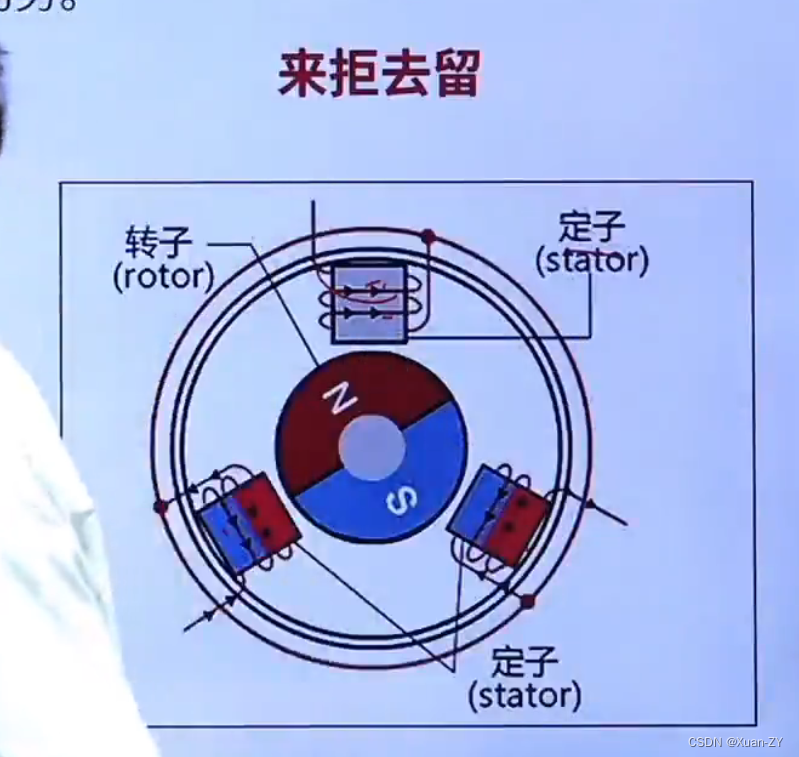
0. 前言 本章节会详细介绍SVPWM,计划在下一章讲解过调制。学完这一章你就会理解第一章里面PID控制器输出的dq轴电压经过变换后得到的αβ轴电压的真正含义,为什么会会输出αβ轴电压,αβ轴电压是怎么被SVPWM利用的。 之前我们讲过FOC是磁场定向控制,在进入SVPWM之前我们要清楚,这个定向的磁场是由什么产生的?怎么被控制的? 定向的磁场是由什么产生
永磁同步电机无感FOC(龙伯格观测器)算法技术总结-实战篇
文章目录 1、ST龙伯格算法分析(定点数)1.1 符号说明1.2 最大感应电动势计算1.3 系数计算1.4 龙伯格观测器计算1.5 锁相环计算1.6 观测器增益计算1.7 锁相环PI计算(ST)1.8 平均速度的用意 2、启动策略2.1 V/F压频比控制2.2 I/F压频比控制 3、算法开发3.1 Luenberger核心算法模块3.1.1 Luenberger.h3.1.2 Luenber
永磁同步电机无感FOC(龙伯格观测器)算法技术总结-仿真篇
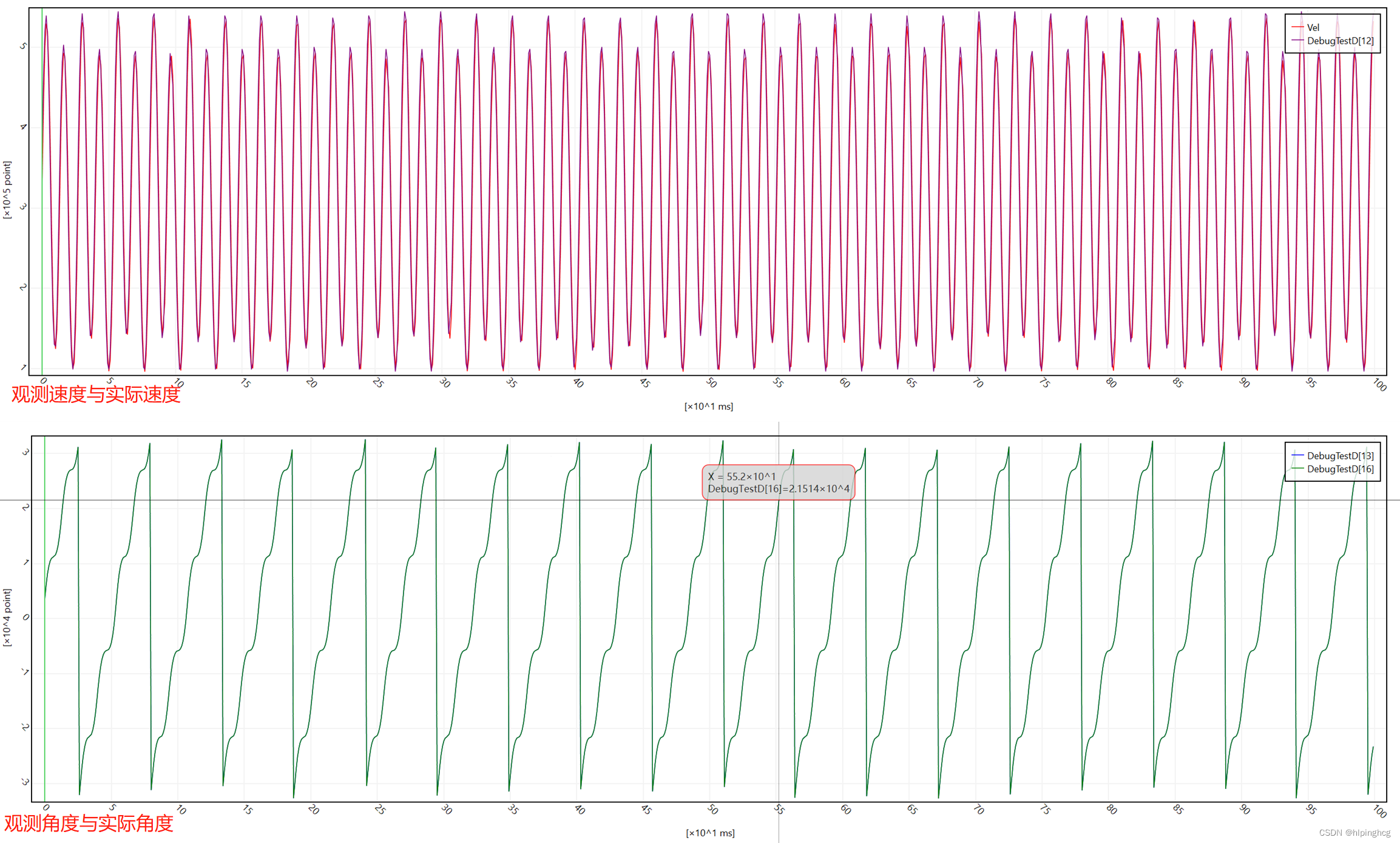
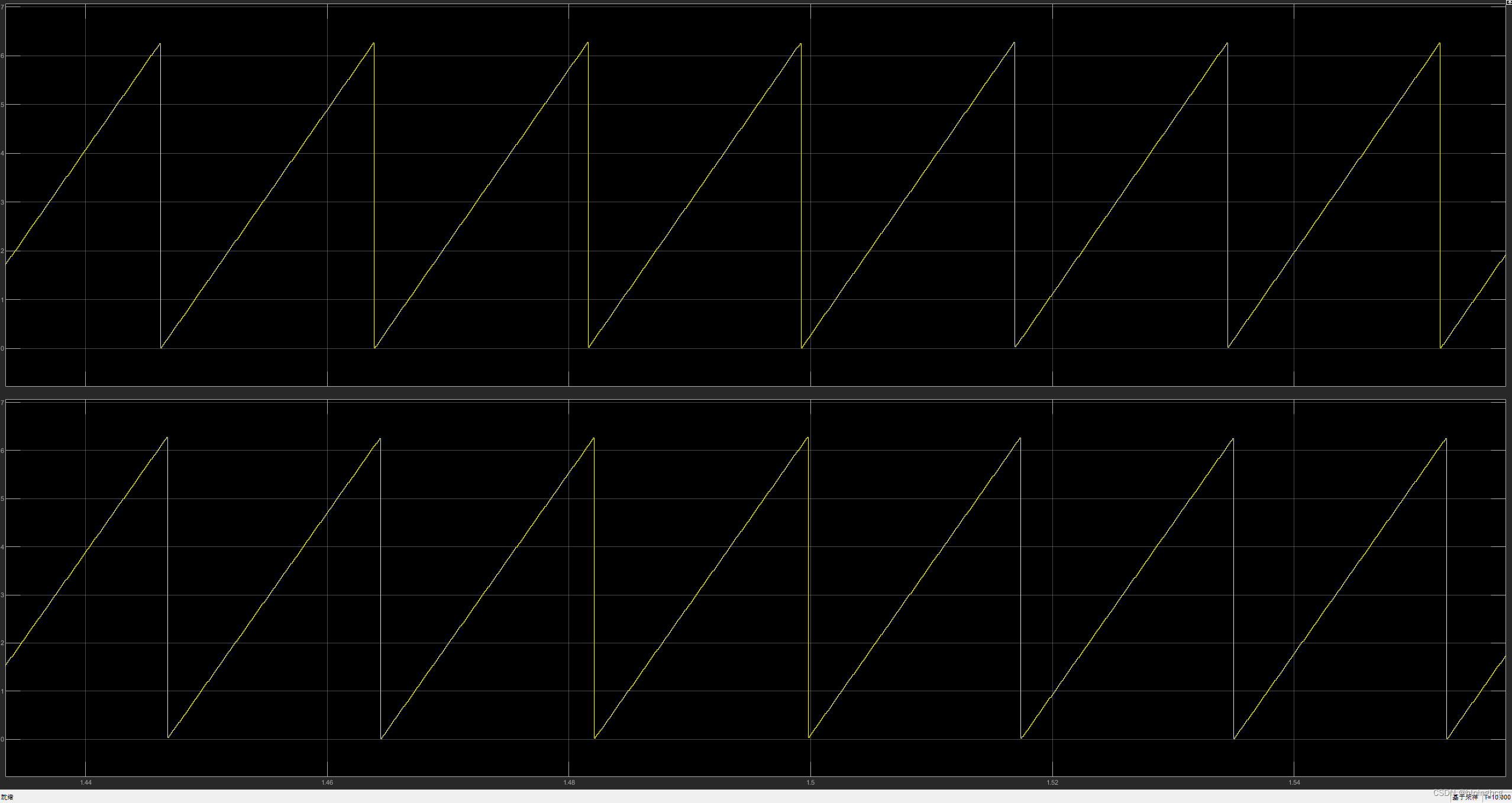
文章目录 1、观测器的引入2、β轴向下的电机观测器数学模型3、β轴向下的转子点角度及速度观测4、Simulink仿真模型搭建4.1模型总览4.2 Luenberger观测器模块4.2.1 I_alpha观测4.2.2 I_beta观测4.2.3 e_alpha、e_beta观测4.2.4 锁相环 4.3 速度设定4.4 速度观测结果4.5 电角度观测结果 模型下载地址:无感FOC
中科数安|公司办公文件资料\数据防泄密,自动智能无感透明加密保护、防止外泄管理系统
中科数安办公文件资料防外泄解决方案 在现代企业运营中,保护核心办公文件资料的安全至关重要。中科数安提供的自动智能无感透明加密保护管理软件正是为了解决这一问题而设计的。这款软件通过先进的加密技术和智能管理功能,确保企业数据在存储、传输和使用过程中都得到严密的保护。 ——广东中科数安信息有限公司—— www.weaem.com—— 主要功能与特点: 自动智能加密:软件

vue2实现无感刷新token
🎬 江城开朗的豌豆:个人主页 🔥 个人专栏 :《 VUE 》 《 javaScript 》 📝 个人网站 :《 江城开朗的豌豆🫛 》 ⛺️ 生活的理想,就是为了理想的生活 ! 目录 📘 引言: 📟 安装依赖 📟 创建 Axios 实例并做请求封装 📟 使用封装的 Axios 实例 📘 写在最后 📘 引言: 在 Web
【电机仿真】HFI算法脉振高频电压信号注入观测器-PMSM无感FOC控制
【电机仿真】HFI算法脉振高频电压信号注入观测器-PMSM无感FOC控制 文章目录 前言一、脉振高频电压注入法简介(注入在旋转坐标系的d轴)1.旋转高频电压(电流)注入法2.脉振高频电压注入法 二、高频注入理论1.永磁同步电机的高频模型2.估计坐标系3.上式联立得到4.在估计的两相旋转坐标系的直轴上注入高频余弦电压信号5.将4代入3可得6.PI调节器的输入量计算7.脉振高频电压注入法

【电机控制】PMSM无感FOC控制(九)无感启动
0. 前言 终于到了FOC无感入门的最后被一个章节了,无感foc的启动其实很好理解,分为三个阶段:转子定位、I/F强拖、电流转速双闭环。 1. 无感foc启动 (1)转子定位阶段: 首先将q轴电流设定一个能将转子拖动的值Iq_force,Id给0,角度给0,进行反park变换和SVPWM,产生一个固定的磁场将转子拖动到初始位置,然后切换到I/F强拖阶段。