本文主要是介绍STM32 Simulink 自动代码生成电机控制——无感六步方波仿真,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
目录
前言
无感控制理论
仿真
过零检测
反电动势采样
系统运行
编辑
总结
前言
STM32 Simulink 自动代码生成电机控制——霍尔有感六步方波仿真到开发板运行-CSDN博客
前面文章实现了有感方波控制再到开发板运行,关于无感方波控制的仿真已经在同一个模型里实现。在落实到硬件上还需要解决反电动势采样等问题,这里聊聊仿真。硬件实现有时间再考虑做。现在很多芯片集成了内部比较器,反电动势过零检测直接通过硬件完成。这里主要通过 仿真来理解整个系统,在使用一些方案的时候知道如何调试,从各个环结优化控制。
无感控制理论
对于 BEMF 方波控制来说,电机启动时,是不知道电机转子位置,所以需要用外同步方式启动电机,让定子电流按给定大小和频率拖动电机转子跑,然后电机达到切换电频率,就可切换到反电动势模式跑电机,并运行速度和电流闭环控制。
1.双闭环控制的话和霍尔的控制流程差不多,读取母线电流采样的 AD 值,计算母线电流。
2.电流环计算输出 PWM 占空比,控制电流为给定电流大小
3. 保持一种开管状态(即保持一个方向矢量定位),定位完成,有些说法是对齐,然后按一定频率改变开管状态,并按规律提升改变频率,也就是开环。到达切换电频率,然后切换到反电动势模式,进入闭环。(比较典型的三段式运行)
稳态的控制系统就和霍尔方波一样了。
仿真
系统仿真如下,在霍尔六步换相进行了说明,这里主要介绍BEMF无感方波。

过零检测
和霍尔不一样,霍尔检测到沿变化,就需要去考虑进行换向。如下黄色是霍尔信号沿发生变化,蓝色是电机BEMF信号。过零点超前霍尔信号30度,因此在实际应用中需要调整过零点的延迟时间,保证换向正确才能正常控制。

反电动势采样
仿真的电机模型可以直接拉出来反电动势,很理想。但是在实际应用中是从相电压的采样上分离出反电动势。下图是S12ZVM的无感电机控制方案的采样时序。
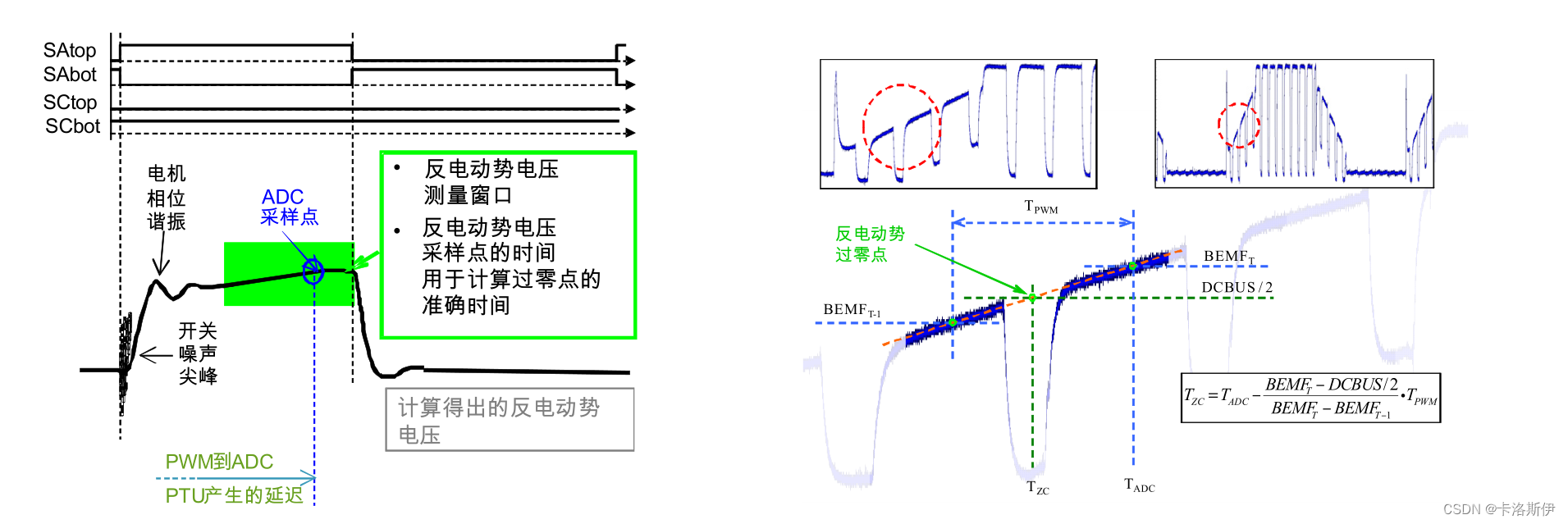
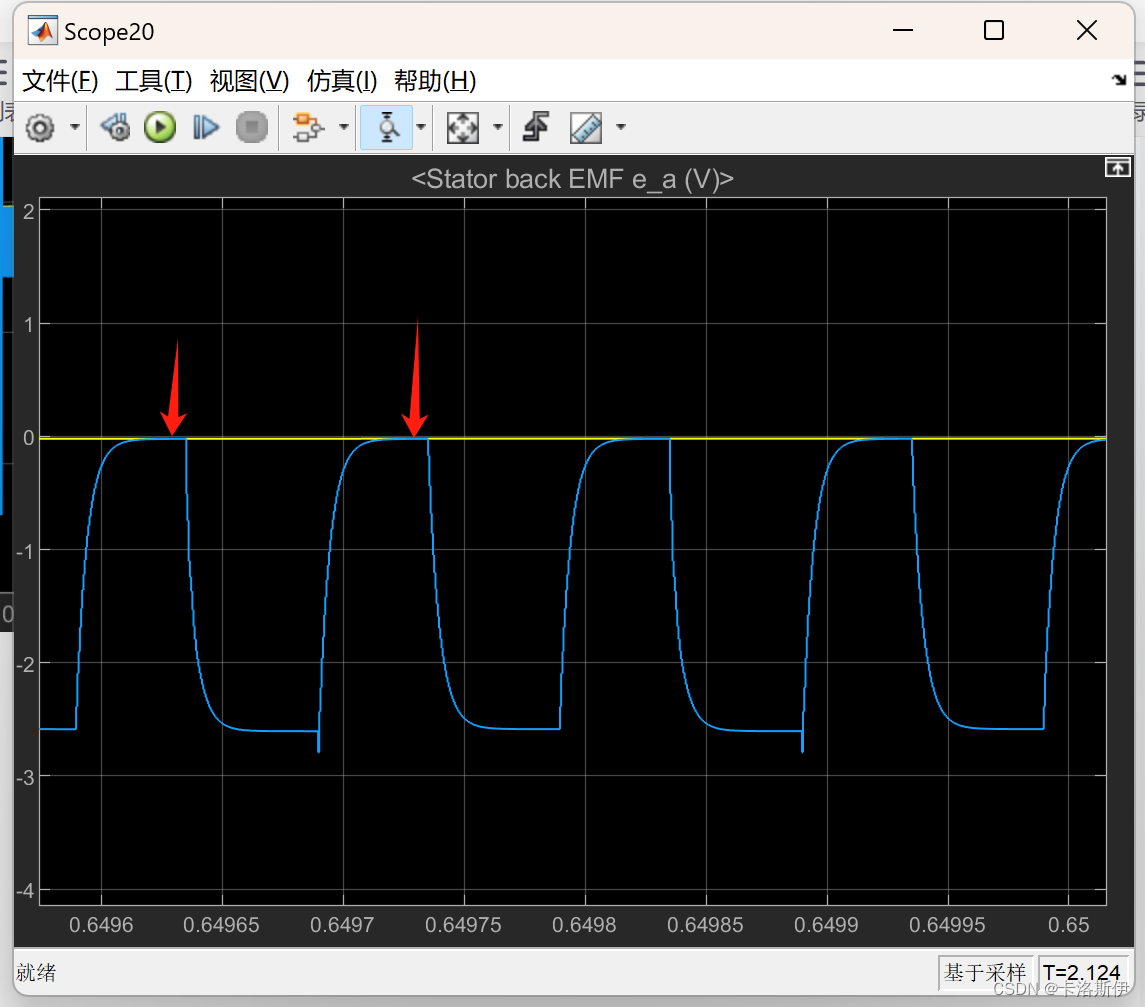
仿真也能看得出来,相电压如下,红色圈就是反电动势过零点。

放大,实际的采样点要避开管子的开关噪声,才能采到正确的BEMF信号。
采样到的电压要减去母线电压的一半,正常三相电压对地的电压范围是0-母线电压的五半。如下母线电压是24V,所谓的过零点其实就是过12V的点,减12才是过零。

这里塔了个反电动势采样的仿真。
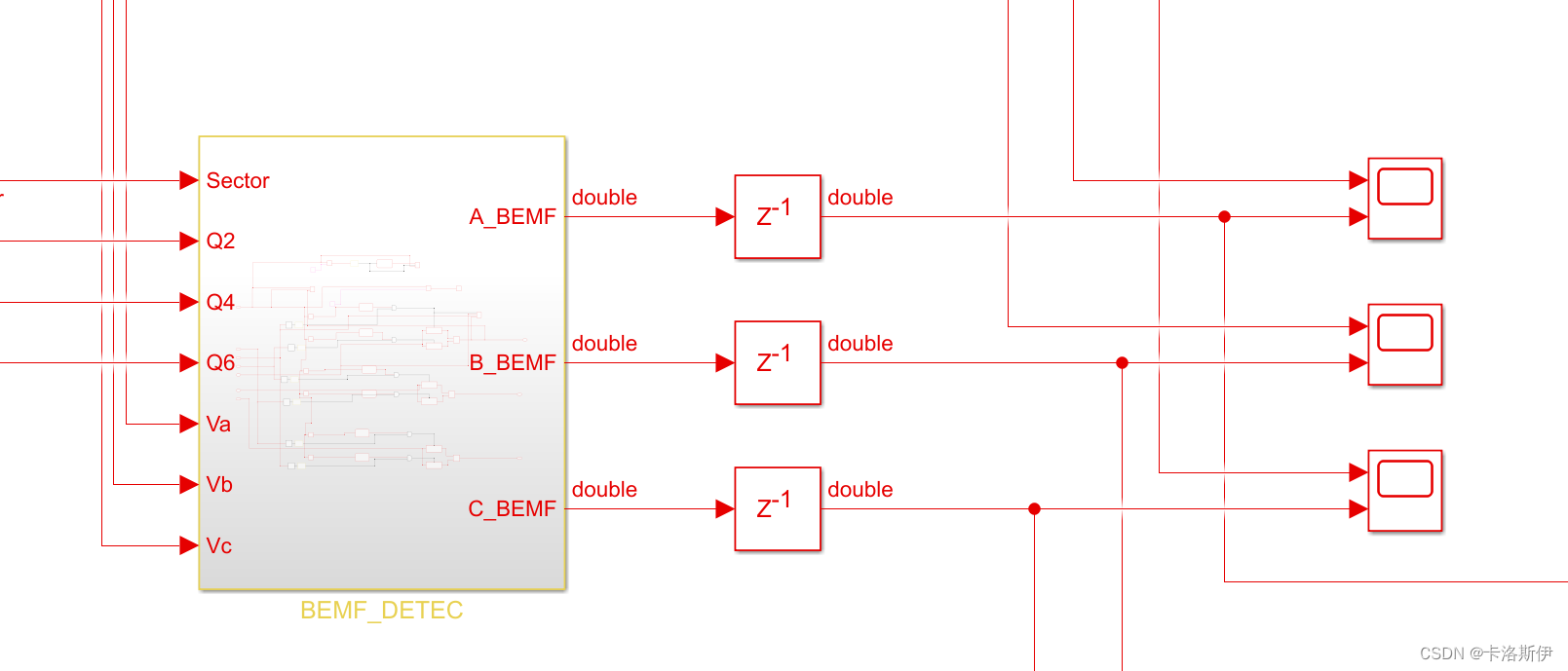
效果如下:
黄色是实际反电压势,蓝色是通过相电压提取出来的,完全可以得到过零点的信息。这部分大多在MCU底层进行配置,不涉及代码生成。

需要注意的是避开换向消磁时间,如下:

在换相时,不导通相绕组需要一段时间去磁,在此期间,因电感上电流不能突变,电机定
子绕组的电流持续在相同的方向,且电流会持续下降到零,在此期间,悬空相线圈电压会
拉高到母线和拉低到底(有电流续流方向决定)在检测过零点时,需要避过去磁事件。
加载后,随负载功率的增大,电机绕组电流也增大,当在换相时,会突然关断开关管,由
于电感上电流不能突变,且电感上电压 U = L*(di/dt),若突然使某一半桥臂上下管都
断开,此时此桥臂对应的电机绕组上的电流需要续流回路减小电流:
1 P1 的解释:若此桥臂对应的电机绕组上的电流方向为电机绕组中心点流向上下桥臂中
点,则在此桥臂中点将产生高电压,又由于在此峭壁上管内部集成了反向二极管,此时另
一桥臂下管闭合接地,因此形成续流回路,电机绕组上电流会流向母线正极,此时此桥臂
中点电压将略低于母线电压一个二极管压降。
2 P2 的解释:若此桥臂对应的电机绕组上的电流方向为上下桥臂中点流向电机绕组中心
点,由于在此峭壁下管内部集成了反向二极管,此时另一桥臂下管闭合接地,因此形成续流回路,此时,电机绕组上电流会经此桥臂下管流向另一桥臂下管,此时此桥臂中点电压
将略高于地电压一个二极管压降。
仿真如下:

如果不避开这两个点的话就可能采到下面这样的反电动势。

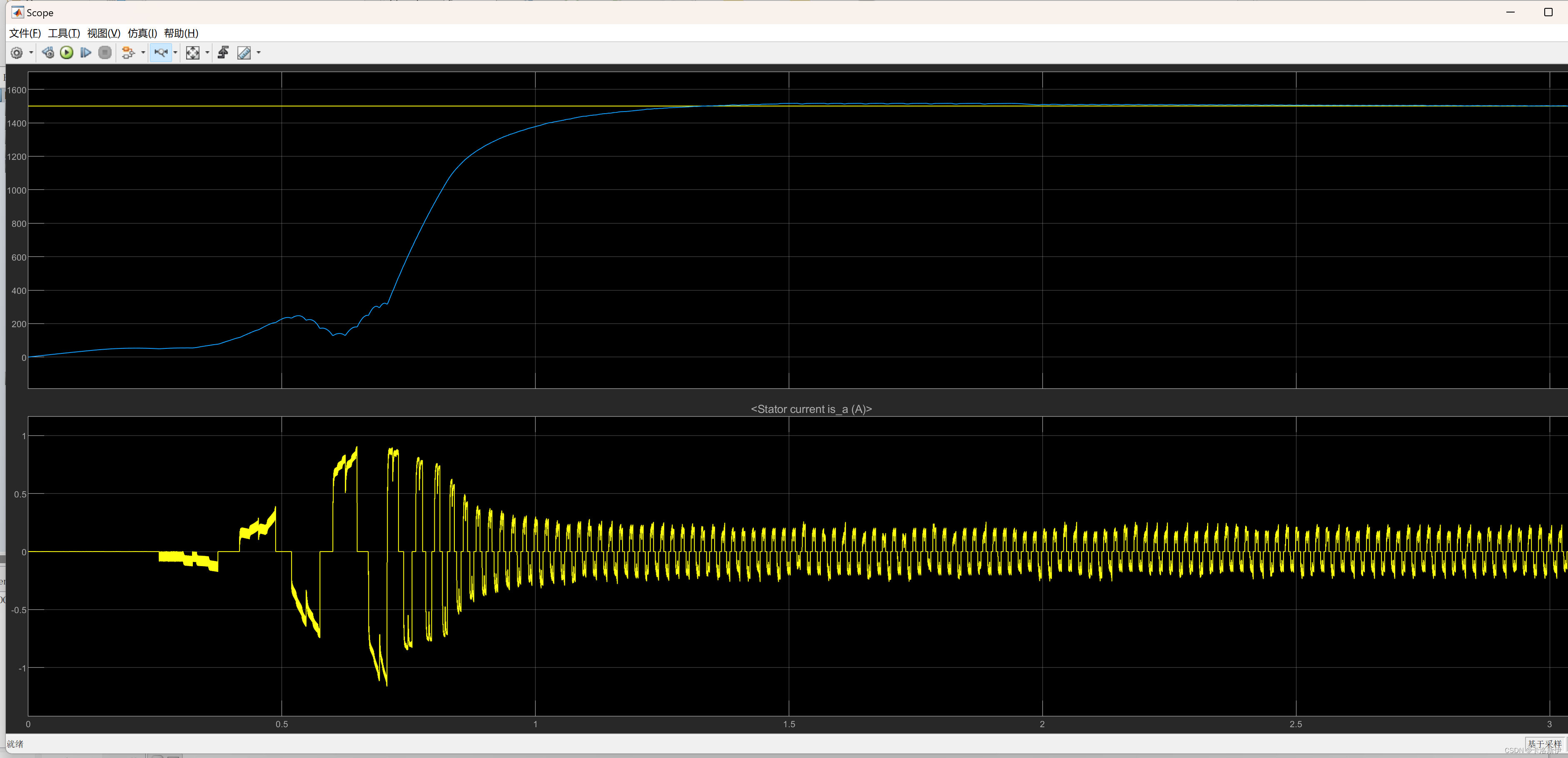
系统运行
模拟实际的情况,也增加了三段式的开环启动过程。
总结
先记录到这里吧,目前市面上方波控制的方案都是很低成本的芯片,或者高集成度的,但不管用软件还是用硬件检测过零,或者是系统环路控制都是相通的。通过仿真增强对其的理解在工程应用中才能更好对系统进行判断,问题出现在哪里,从哪些方面可以优化。方波无感想要做好也有一定的难度。
这篇关于STM32 Simulink 自动代码生成电机控制——无感六步方波仿真的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







