本文主要是介绍二、永磁同步电机矢量控制(FOC)—不同坐标系下电机数学模型,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
1.电机数学模型
对于永磁同步电机,矢量控制算法是建立在电机的数学模型上,在不同坐标系下,电机数学模型也不同,主要分为自然坐标系ABC下的PMSM数学模型、两相静止坐标系aβ下的PMSM数学模型和两相旋转坐标系dq下的PMSM数学模型。
矢量控制中是进行磁场定向控制,包括转子磁场定向、定子磁场定向和气隙磁场定向。矢量控制基于转子磁场控制,直接转矩控制基于定子磁场定向。
矢量控制中使用最多的是两相旋转坐标系dq下的PMSM数学模型。
假设:(1)相绕组、定子电流、转子磁场都对称;(2)转子无阻尼绕组;(3)忽略磁场饱和(磁感应强度和磁场强度呈现线性关系),不计涡流和磁滞损耗(电能均转化为电枢、气隙存储的磁场能量和转子的机械能),气隙磁密波形为正弦波。
2.三相静止坐标系ABC下的PMSM数学模型
(1)电压方程
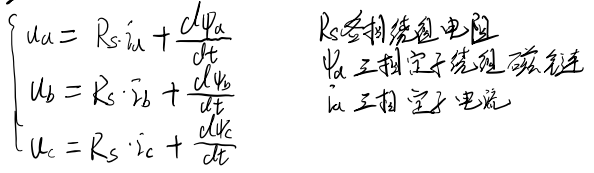
补充,以上电压、电流、磁链均为瞬时值
(2)磁链方程
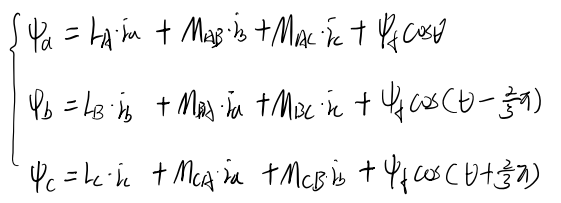
L_A为三相定子绕组自感,M_AB为定子绕组自感,若各相绕组匝数相同,自感值等于互感值,φf为转子永磁体励磁磁链,θ为θe电角度
CSDN博主昔时扬尘处给的公式
(3)电磁转矩方程
根据机电能量转化原理,电磁转矩Te等于磁场能量对机械角度θm的偏导。
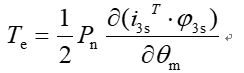
若通过三线电流计算输出转矩

Pn为磁极对数,![]()
(4)机械运动方程
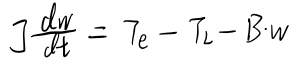
Te为电磁转矩,TL为负载转矩,J为转动惯量,B为阻尼系数,此处w为机械角速度wm,单位为rad/s。
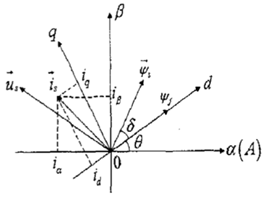
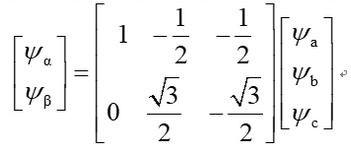
3.两相静止坐标系αβ下的PMSM数学模型
(1)电压方程
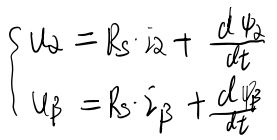
![]() 为α轴磁链
为α轴磁链
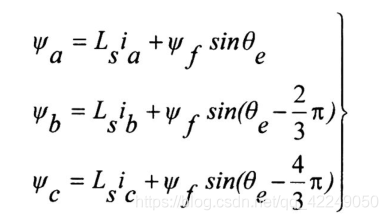
(2)磁链方程

Ld、Lq分别为交直轴电感,对于表贴式PMSM,Ls(定子电感)=Ld=Lq
CSDN博主昔时扬尘处给的公式
(3)电磁转矩方程

CSDN博主昔时扬尘处给的公式

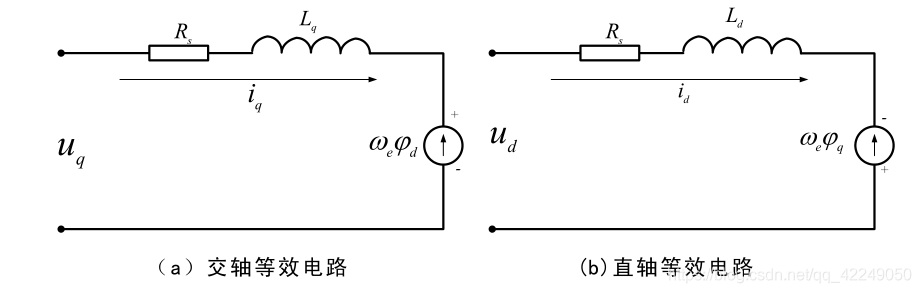
4.两相旋转坐标系dq下的PMSM数学模型
(1)电压方程
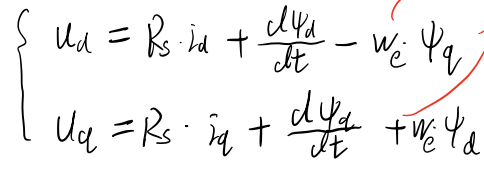
电角速度![]()
将交直轴电压进行等效
(2)磁链方程
同步旋转坐标系下的表贴式永磁同步电机有Ld(直轴电感)=Lq(交轴电感)=Ls
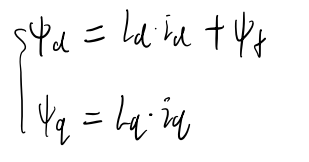
![]() 为转子永磁体励磁磁链。
为转子永磁体励磁磁链。
(3)电磁转矩方程

电磁转矩由两部分组成,第一项是永磁体和定子绕组磁链之间相互作用产生,第二项是由于磁阻变化产生,隐极电机Lq=Ld不存在磁阻变化,磁阻变化转矩是凸极电机特有的。
由于表贴式(隐极)永磁同步电机交直轴电感相同,转矩方程转变为下式:
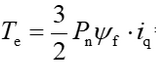
对转矩电流iq进行控制,就可以有效控制电磁转矩。磁极对数和转子磁链为已知量。
5.补充
内置式永磁同步电机的凸极效应使得磁路交叉饱和严重。在电机高速运行期间,电机参数发生非线性变化,主要是由于磁饱和(可分为饱和和交叉饱和)以及电机长时间运行温度升高、趋肤效应导致的参数变化。
(1)磁阻和电感的关系:
磁阻越大,电感越小
磁阻![]()
磁动势f=N(封闭线圈匝数)*i(通过该线圈的电流)=磁阻*磁通量,若电流发生变化,则磁动势变化,磁阻越大,磁通量变化越小。
磁阻变化导致线圈磁通量变化,电感的大小由于磁通量的变化率有关,当磁场分布发生变化时,电感也会随之变化。
![]()
(2)凸极效应:凸极电机的气隙不均匀,也即直轴(d轴)和交轴(q轴)的有效气隙不同,导致气隙磁场不均匀。交-直轴电枢反应电抗对电机性能的影响称为凸极效应。电枢反应磁场的作用使磁阻发生很大变化,d 轴电感和 q 轴电感不相等(凸极电机Ld<Lq),交直轴磁路不同,因此交直轴磁阻不同,最终导致交直轴电感不一样
(3)d轴磁路由气隙、永磁体、铁芯组成(永磁体与气隙磁导率较低,磁阻较大),q轴磁路由气隙和铁芯组成(铁芯会出现磁路饱和问题),d轴磁阻较大,则d轴电感较小。由于q轴电流增大,所以q轴磁路中出现饱和,q轴电感相应减小
(4)磁饱和现象:磁饱和是磁性材料的物理特性,其通过的磁通不能无限增大,达到一定值时,即使增大电流和线圈匝数都无法提高磁通密度。当磁场强度逐渐增加,磁导率逐渐减小,磁感应强度与磁场强度不再为线性关系。硅钢片把电能转化成磁能再转化成动能的能力是有限的。当电机电流超过一定范围后,电能无法再转化成更多的磁能,只能转化成热能,导致电机迅速升温,这是磁饱和的后果。
(5)趋肤效应:当导体中有交流电或者交变电磁场时,导体内部的电流分布不均匀,电流集中在导体的“皮肤”部分,也就是说电流集中在导体外表的薄层,越靠近导体表面,电流密度越大,导体内部实际上电流较小,结果使导体的电阻增加,使它的损耗功率也增加。电阻随温度升高而升;磁链随温度升高会降低。
这篇关于二、永磁同步电机矢量控制(FOC)—不同坐标系下电机数学模型的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






