本文主要是介绍PMSM 永磁同步电机滑膜控制 SVPWM矢量控制 matlab simulink 仿真,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
仿真搭建平台:
(1)该模型采用matlab/simulink 2016b版本搭建,使用matlab 2016b及以上版本打开最佳;
(2)该模型已经提前转换了各个常用版本(最低为matlab2012b),防止出现提示版本过高的情况。
模型截图:
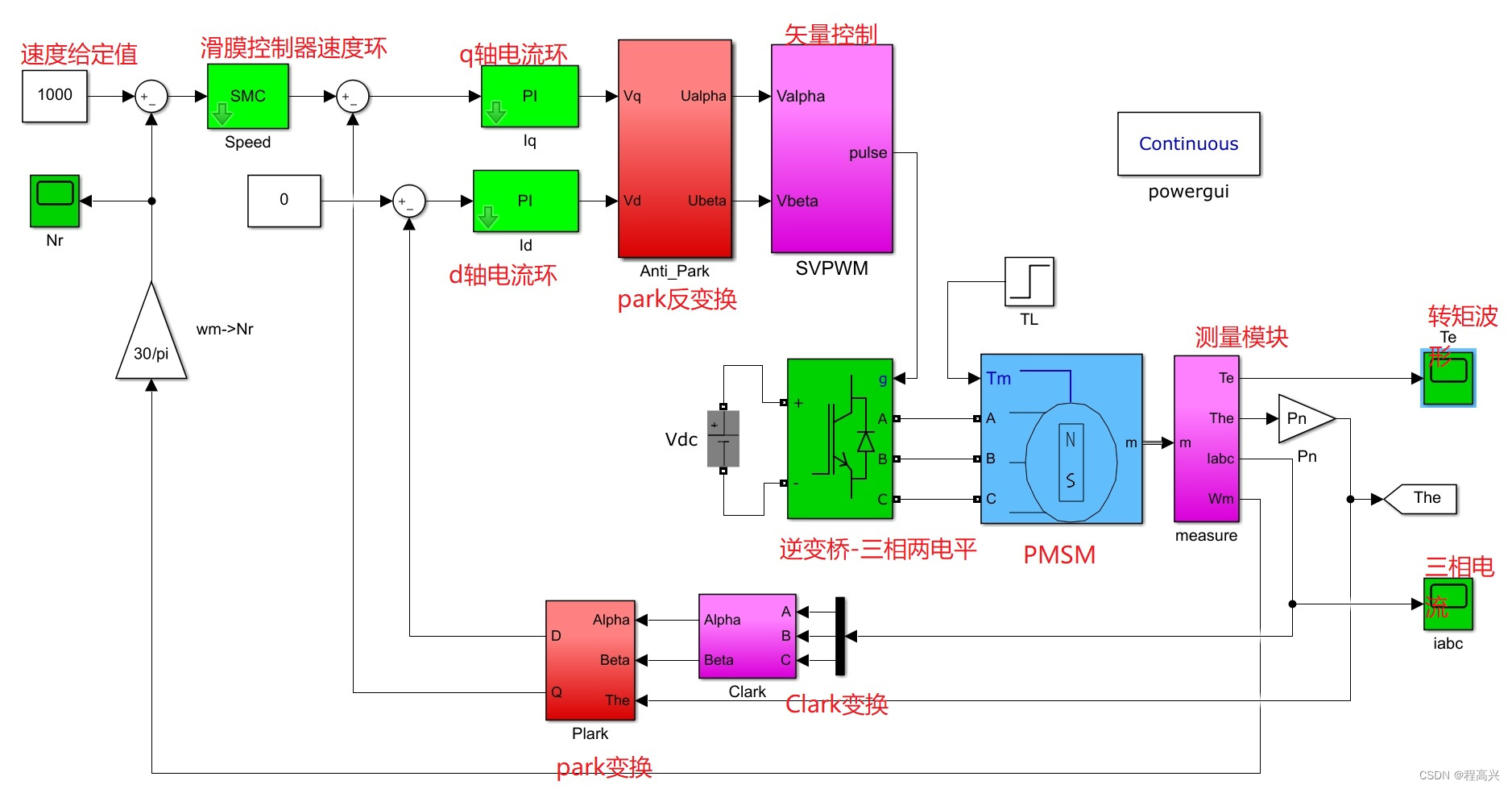
算法介绍:
(1)仿真模型由直流源、三相逆变桥、永磁同步电机(PMSM)、转速外环滑膜控制器、电流内环PI控制器、Park变换模块、Clark变换模块、测量模块等构成.
(2)采用转速、电流双闭环控制;速度外环采用滑膜控制、电流内环采用PI控制;
(3)控制策略上采用SVPWM矢量控制;
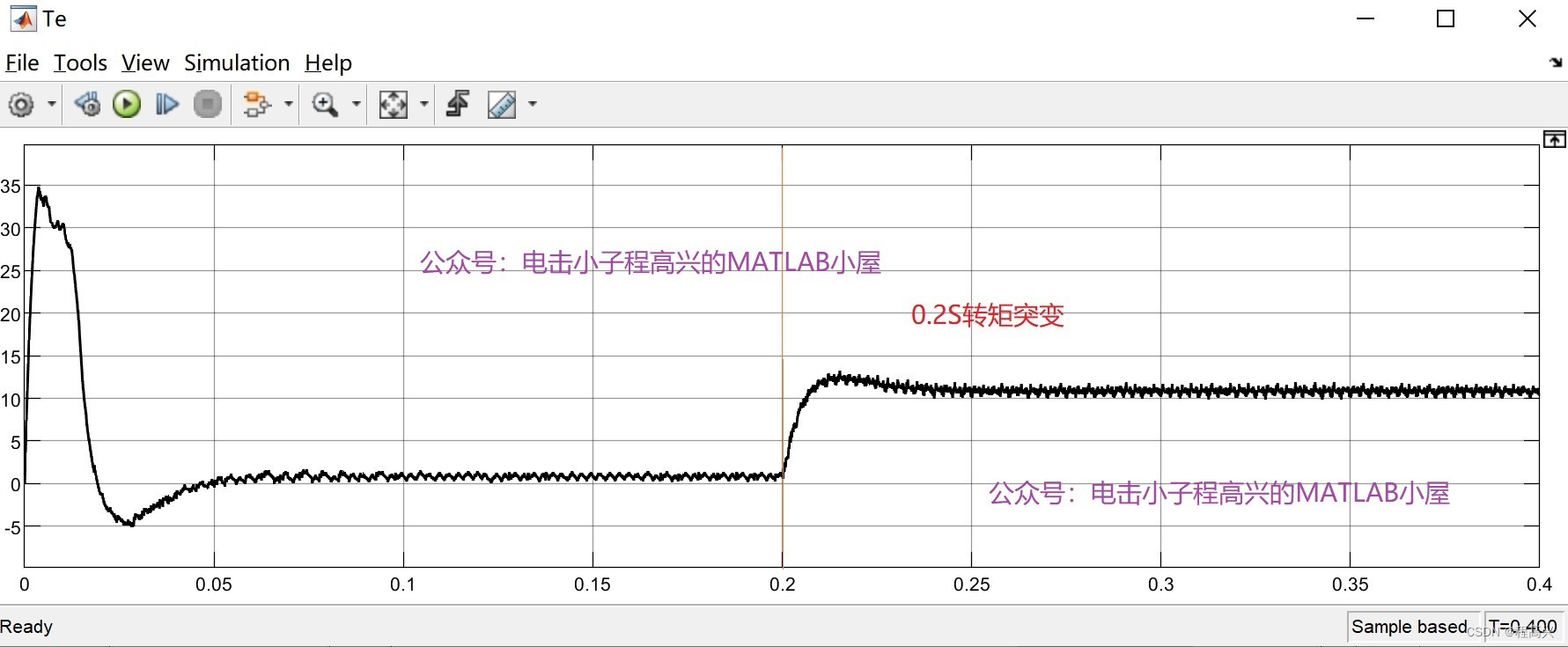
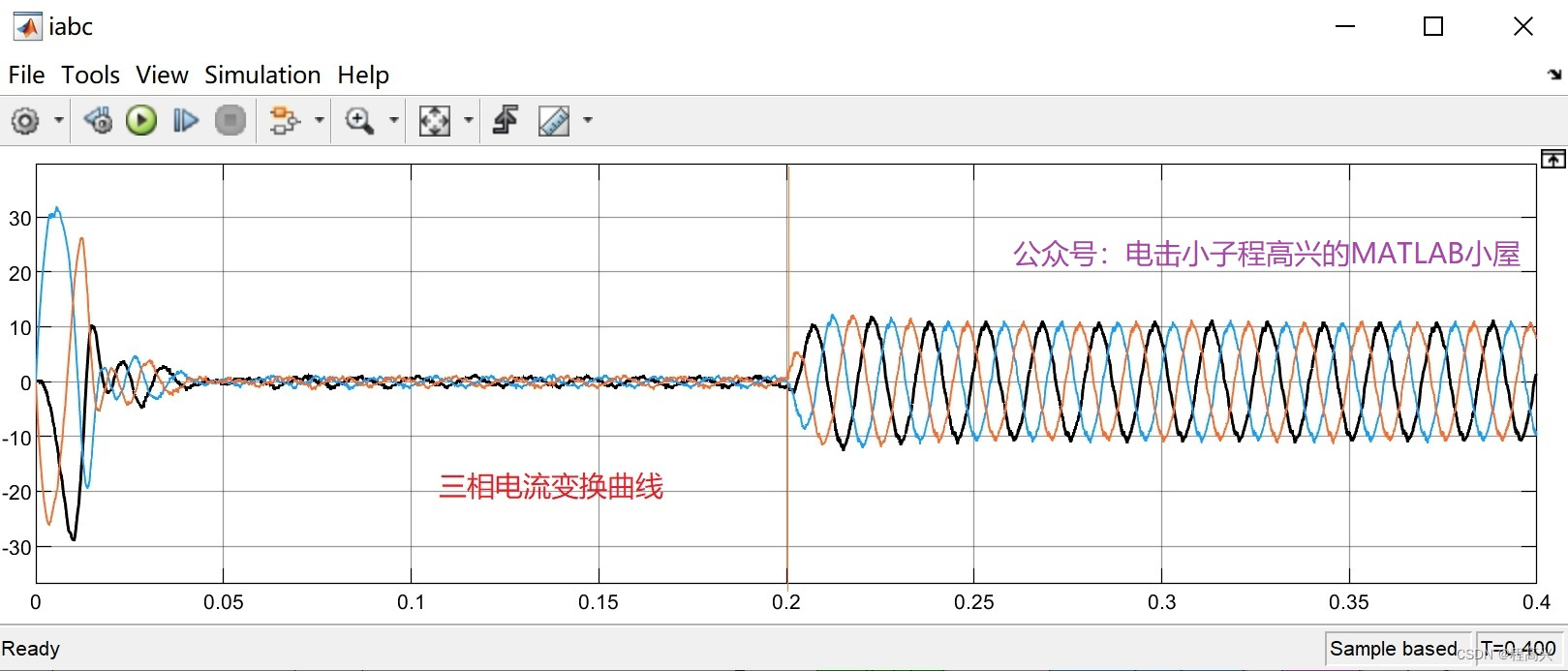
(4)转速跟踪性能良好,具有较好的抗负载扰动性能。
仿真结果:

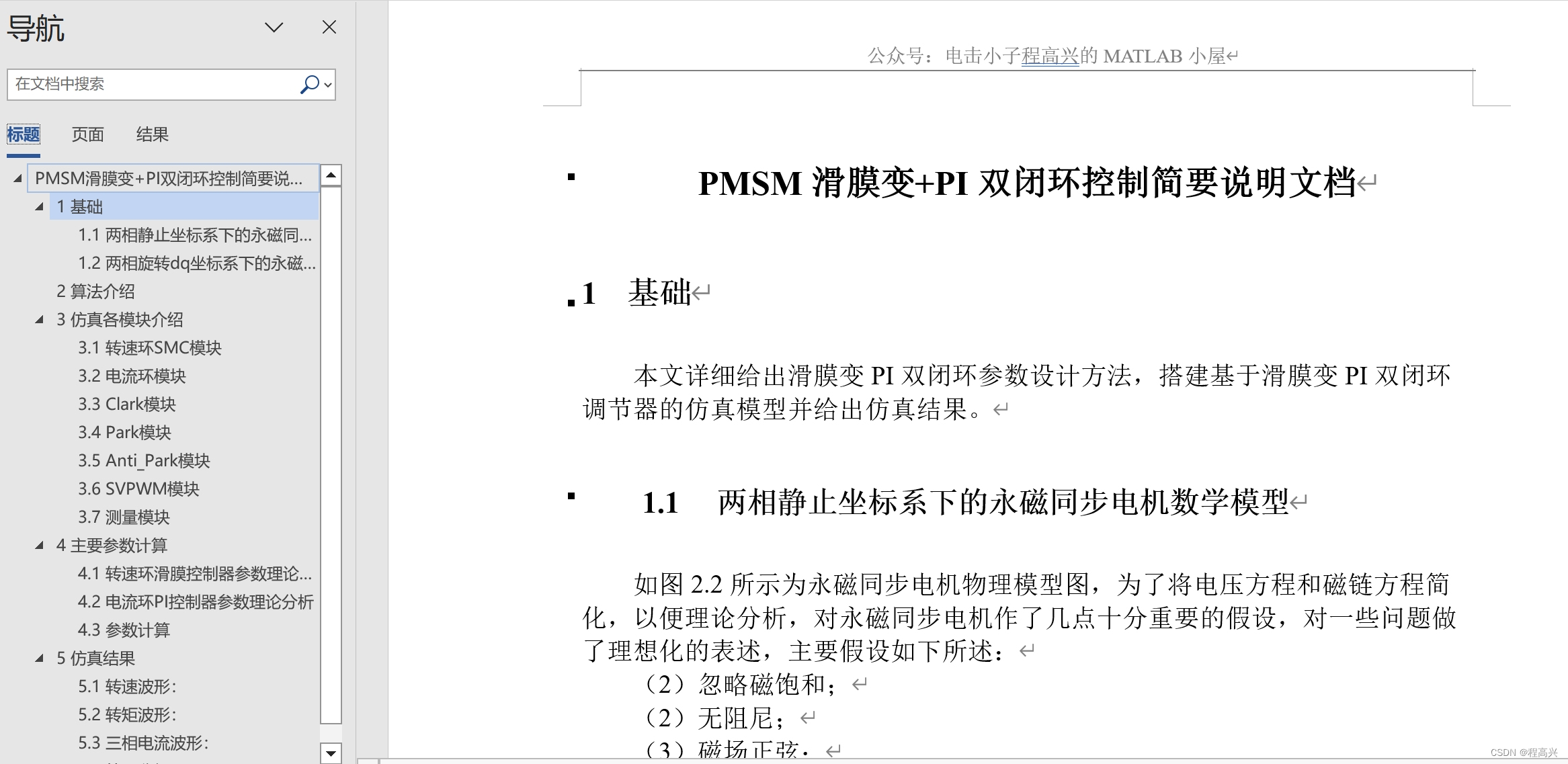
配套说明文档:
这篇关于PMSM 永磁同步电机滑膜控制 SVPWM矢量控制 matlab simulink 仿真的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!



