pmsm专题


基于矢量控制器的PMSM永磁同步电机速度控制系统simulink建模与仿真
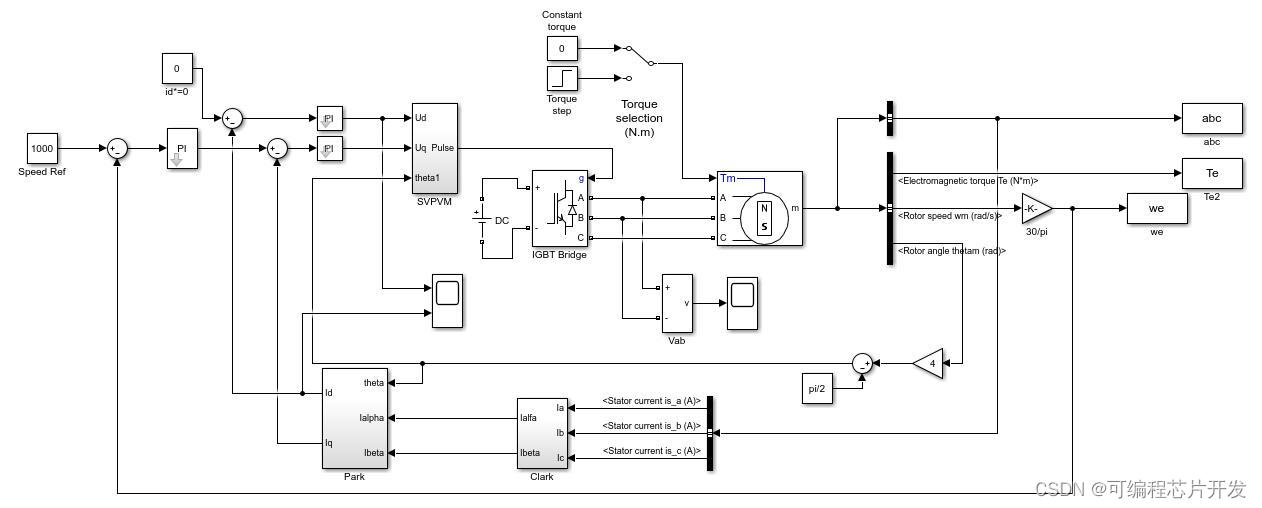
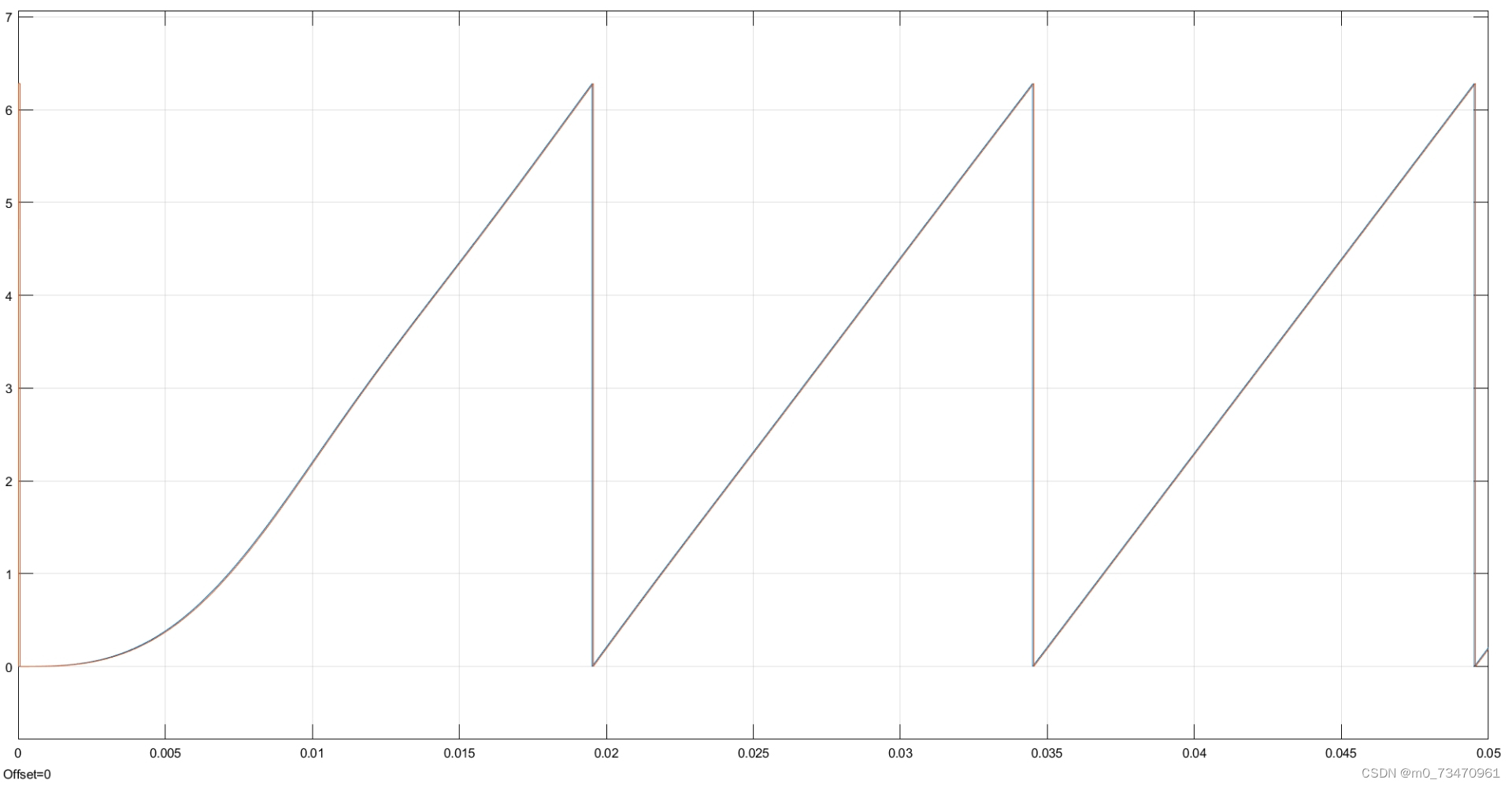
目录 1.课题概述 2.系统仿真结果 3.核心程序与模型 4.系统原理简介 5.完整工程文件 1.课题概述 基于矢量控制器的PMSM永磁同步电机速度控制系统simulink建模与仿真,仿真输出电机转速跟踪曲线,PID控制器输出曲线以及Te输出曲线。 2.系统仿真结果 (完整程序运行后无水印) 3.核心程序与模型 版本:MATLAB2022a
【电机控制】滑模观测器PMSM无感控制波形图
【电机控制】滑模观测器PMSM无感控制波形图 文章目录 前言一、FOC控制1.三相电流2.Clark变换静止坐标系iαiβ3.park变换旋转坐标系idiq4.电流环PI控制输出UdUq5.UdUq 反park变换UαUβ 二、反电动势观测器BEMF1.静止坐标系iαiβ提取反电动势EaEb2.反电动势EaEb提取位置信息、EqEd3.位置信息提取机械转速wr 总结

PMSM 永磁同步电机滑膜控制 SVPWM矢量控制 matlab simulink 仿真
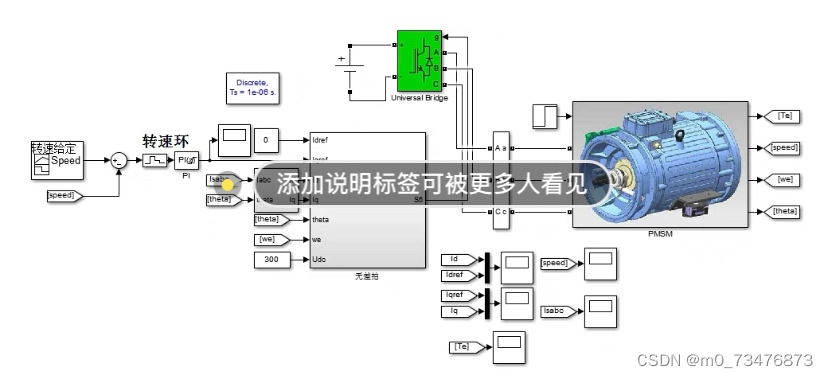
仿真搭建平台: (1)该模型采用matlab/simulink 2016b版本搭建,使用matlab 2016b及以上版本打开最佳; (2)该模型已经提前转换了各个常用版本(最低为matlab2012b),防止出现提示版本过高的情况。 模型截图: 算法介绍: (1)仿真模型由直流源、三相逆变桥、永磁同步电机(PMSM)、转速外环滑膜控制器、电流内环PI控制器、Park变换模块、Clark变

【电机控制】PMSM无感FOC控制(三)SVPWM
0. 前言 本章节会详细介绍SVPWM,计划在下一章讲解过调制。学完这一章你就会理解第一章里面PID控制器输出的dq轴电压经过变换后得到的αβ轴电压的真正含义,为什么会会输出αβ轴电压,αβ轴电压是怎么被SVPWM利用的。 之前我们讲过FOC是磁场定向控制,在进入SVPWM之前我们要清楚,这个定向的磁场是由什么产生的?怎么被控制的? 定向的磁场是由什么产生
【电机仿真】HFI算法脉振高频电压信号注入观测器-PMSM无感FOC控制
【电机仿真】HFI算法脉振高频电压信号注入观测器-PMSM无感FOC控制 文章目录 前言一、脉振高频电压注入法简介(注入在旋转坐标系的d轴)1.旋转高频电压(电流)注入法2.脉振高频电压注入法 二、高频注入理论1.永磁同步电机的高频模型2.估计坐标系3.上式联立得到4.在估计的两相旋转坐标系的直轴上注入高频余弦电压信号5.将4代入3可得6.PI调节器的输入量计算7.脉振高频电压注入法
表贴式PMSM的直接转矩控制(DTC)MATLAB仿真模型
微❤关注“电气仔推送”获得资料(专享优惠) 模型简介 表贴式PMSM的直接转矩控制(DTC),直接使用滞环控制对转矩和磁链进行控制,相对于传统的FOC控制而言,其不需要进行解耦变换,在此次的有以下几点需要注意: 1、此处的扇区判定不同于FOC控制中的扇区判断,这里使用磁链在alpha和beta上的分量进行判断,判断磁链所在的扇区,而foc控制是对电压所在扇区进行判断,这里提供了两种判断方法,

【电机控制】PMSM无感FOC控制(九)无感启动
0. 前言 终于到了FOC无感入门的最后被一个章节了,无感foc的启动其实很好理解,分为三个阶段:转子定位、I/F强拖、电流转速双闭环。 1. 无感foc启动 (1)转子定位阶段: 首先将q轴电流设定一个能将转子拖动的值Iq_force,Id给0,角度给0,进行反park变换和SVPWM,产生一个固定的磁场将转子拖动到初始位置,然后切换到I/F强拖阶段。
基于双闭环PI和SVPWM的PMSM控制器simulink建模与仿真
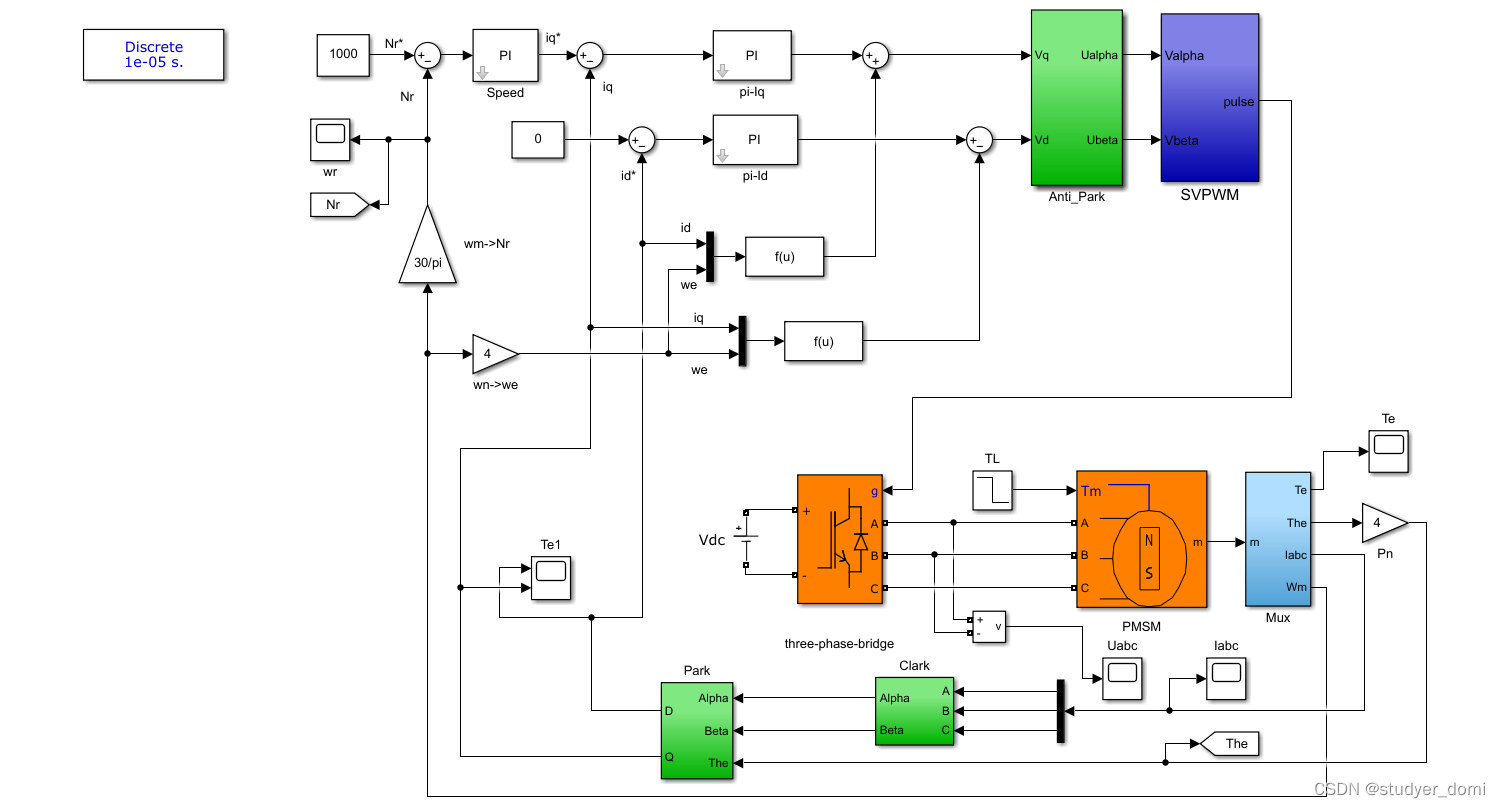
目录 1.课题概述 2.系统仿真结果 3.核心程序与模型 4.系统原理简介 4.1 双闭环PI控制器设计 4.2 SVPWM技术 4.3 控制系统实现 5.完整工程文件 1.课题概述 基于双闭环PI和SVPWM的PMSM控制器simulink建模与仿真。系统包括逆变桥、PMSM、park变换、clark变换、SVPWM、PI控制器、信号测量等单元模块的Si

【电机控制】PMSM无感foc控制(七)滑模观测器的应用
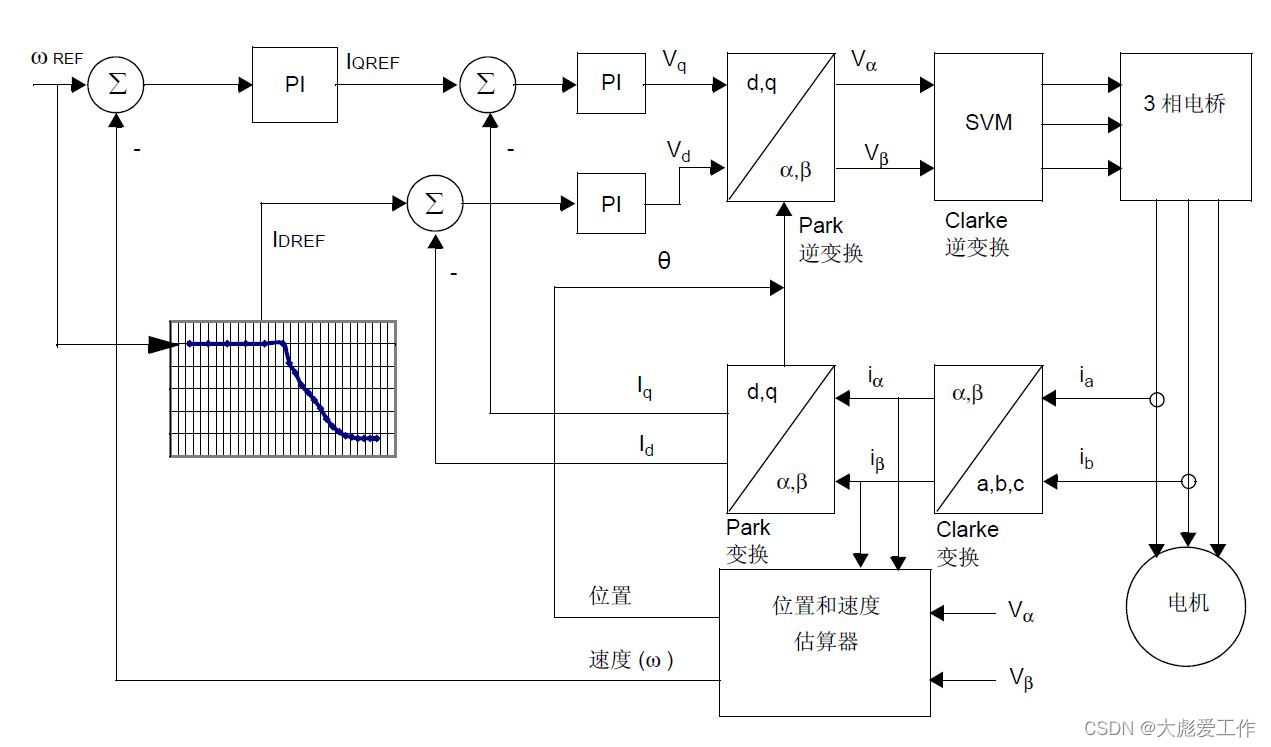
0. 前言 前面我们讲解了foc的整个流程框图,如图0-1所示,其中的坐标变换、PID控制以及SVPWM都已讲解完毕,接下来会用通俗易懂的方式(不会涉及到特别复杂难以理解的公式)来讲解滑模观测器是如何得到的反电动势,从而提取出转子位置及转速。 图0-1 FOC双环控制系统框图 1. 滑模观测器 建议大家先看一下滑模观测器的大致概念,不用完全理解,但是
m基于GA遗传算法的PMSM永磁同步电机参数最优计算matlab仿真
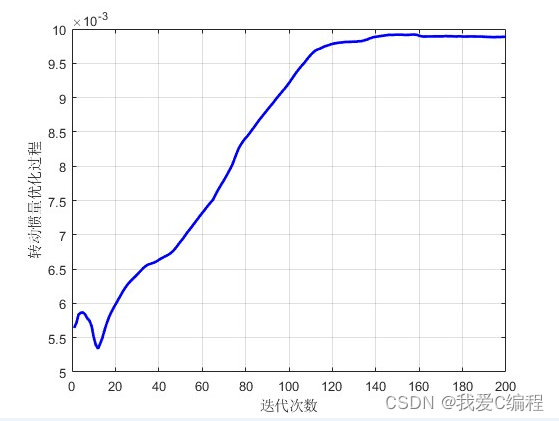
目录 1.算法描述 2.仿真效果预览 3.MATLAB核心程序 4.完整MATLAB 1.算法描述 永磁同步电机(PMSM)基本结构为定子、转子和端盖。其中转子磁路结构是永磁同步电机与其它电机最主要的区别,其在很大程度上决定了永磁同步电机的实际性能指标。通常情况下,永磁同步电机的转子磁路结构分为:凸装式、嵌入式和内置式三种结构。目前为止,由于永磁同步电机优越的性能
【PMSM矢量控制系列】磁场定向控制(FOC)原理
为了实现更佳的动态性能,需要采用更加复杂的控制系统配置来控制永磁同步电机。借助于微控制器所提供的数学处理能力,为了在永磁同步电机中使转矩生成和磁化功能去耦合,可执行使用数学变换的高级控制策略。这样的去耦合转矩和磁化控制通常被称为转子磁通定向控制,或者简称为FOC(Field-Oriented Control)。FOC直译是磁场定向控制,也被称作矢量控制,是目前无刷直流电机(BLDC)和永磁同步电机
PMSM矢量控制笔记(1.3)——直流电机的旋转原理
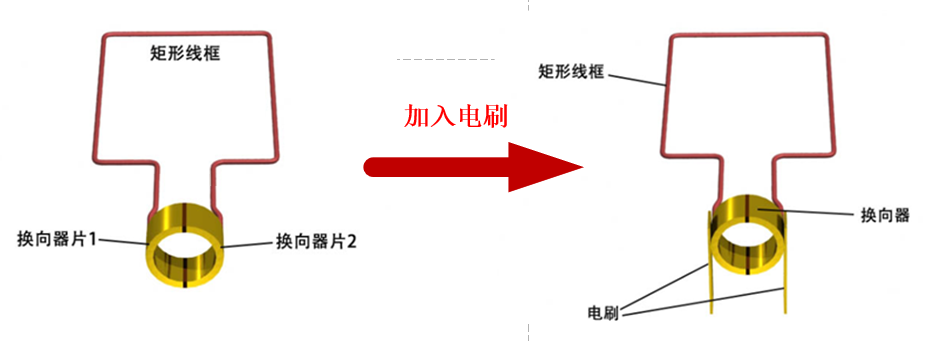
前言: 想要探究这个问题是源于一直以来的一个疑问,我们总是聊矢量控制非常的厉害,性能非常的优异,SVPWM这种调制方式使得电机输出性能很优秀,所以我们一直就这么用着,但是我们好像很少去探究永磁同步电机在被驱动的过程中,到底是怎么转起来的?比如电机旋转到1000rpm,我们非常习惯这样去描述并理解电机运行状态,但是实际上转速是一个时间尺度较长的物理单位,他描述的是一个长时间片在电机上发生的物理现象

PMSM无传感器控制 滑模SMO控制 转子位置估计利用滤波后的扩展反电动势进行反正切计算
PMSM无传感器控制 滑模SMO控制 转子位置估计利用滤波后的扩展反电动势进行反正切计算,再加上滤波器延迟角度进行补偿。 运行无问题,不,只包括仿真文件。 ID:4520658282790059
matlab simulink PMSM_SVPWM PI转速控制
1、内容简介 略 8-可以交流、咨询、答疑 2、内容说明 略PMSM_SVPWM PI转速控制 PMSM SVPWM PI转速控制 3、仿真分析 4、参考论文 略
永磁同步电机滑模观测器无位置传感器矢量控制算法仿真模型,基于SMO的PMSM无位置传感器矢量控制算法
永磁同步电机滑模观测器无位置传感器矢量控制算法仿真模型,基于SMO的PMSM无位置传感器矢量控制算法。 其中SMO模块由锁相环组成,不同于反正切函数。 由matlab/simulink搭建,以供参考学习。 ID:72100679743330301阳光彩虹小彪马


永磁同步电机(PMSM)无差拍预测控制MATLAB仿真模型
永磁同步电机(PMSM)无差拍预测控制MATLAB仿真模型。 程序编写简单易懂,具有一步延时补偿,无差拍和pwm调制结合,效果佳。 ID:1950662557578113爱喝汤的时光机
pmsm simulink foc 仿真_基于扰动观测器的永磁同步电动机无差拍电流预测控制仿真...
南京航空航天大学自动化学院的研究人员柯伟煌、钱胜南、张艺、卜飞飞,在2019年第8期《电气技术》杂志上撰文指出,为改善永磁同步电动机矢量控制中电流环动态性能差、控制精度低等问题,本文研究一种无差拍电流预测控制方法。 但基于电动机参数模型的无差拍预测控制方案存在抗干扰性差的问题,为减小负载扰动对预测控制系统的影响,引入一种负载扰动观测器用于前馈补偿。在扰动观测器的补偿作用下,无差拍电流预测控制系统
simulink电机foc观测器模型,采用龙贝格观测器+PLL进行无传感器控制,其利用 PMSM 数学模型构造观测器模型
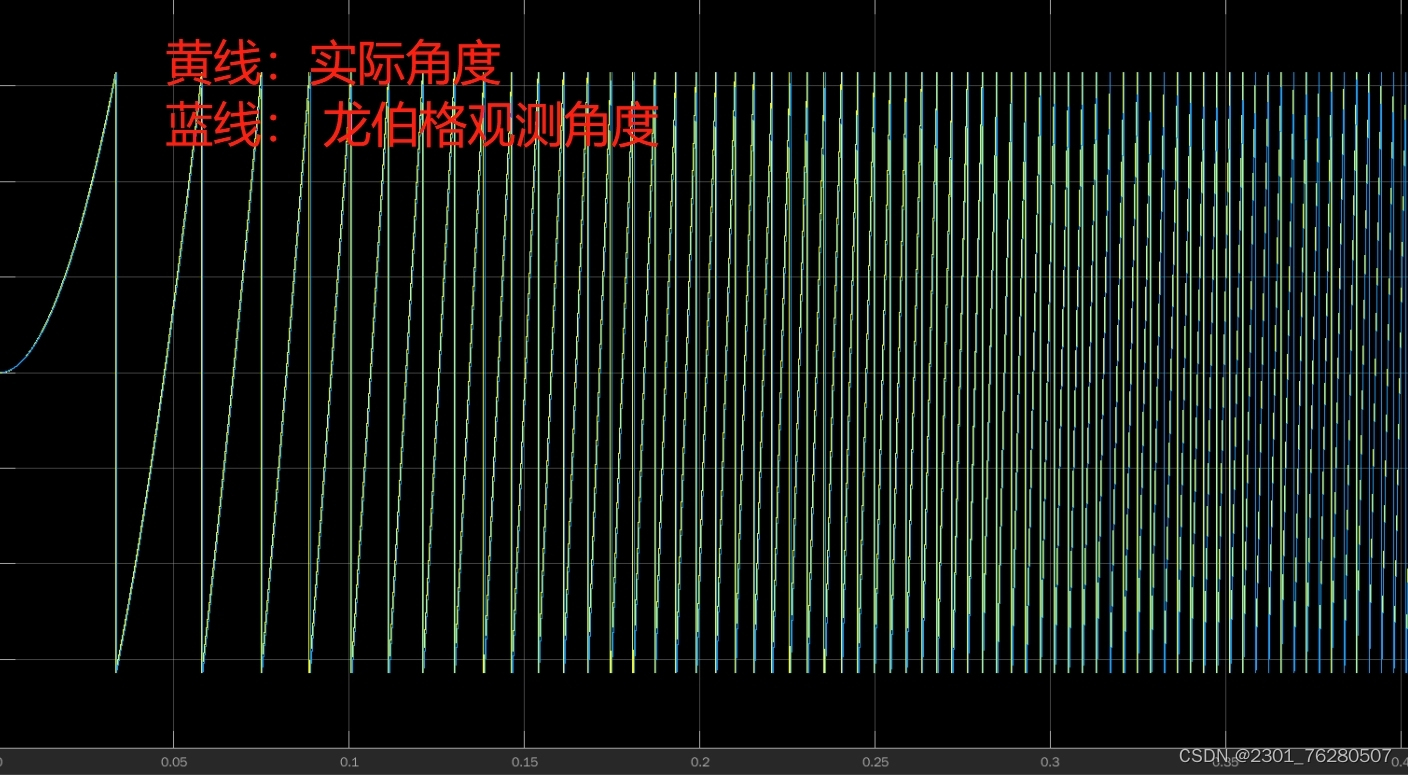
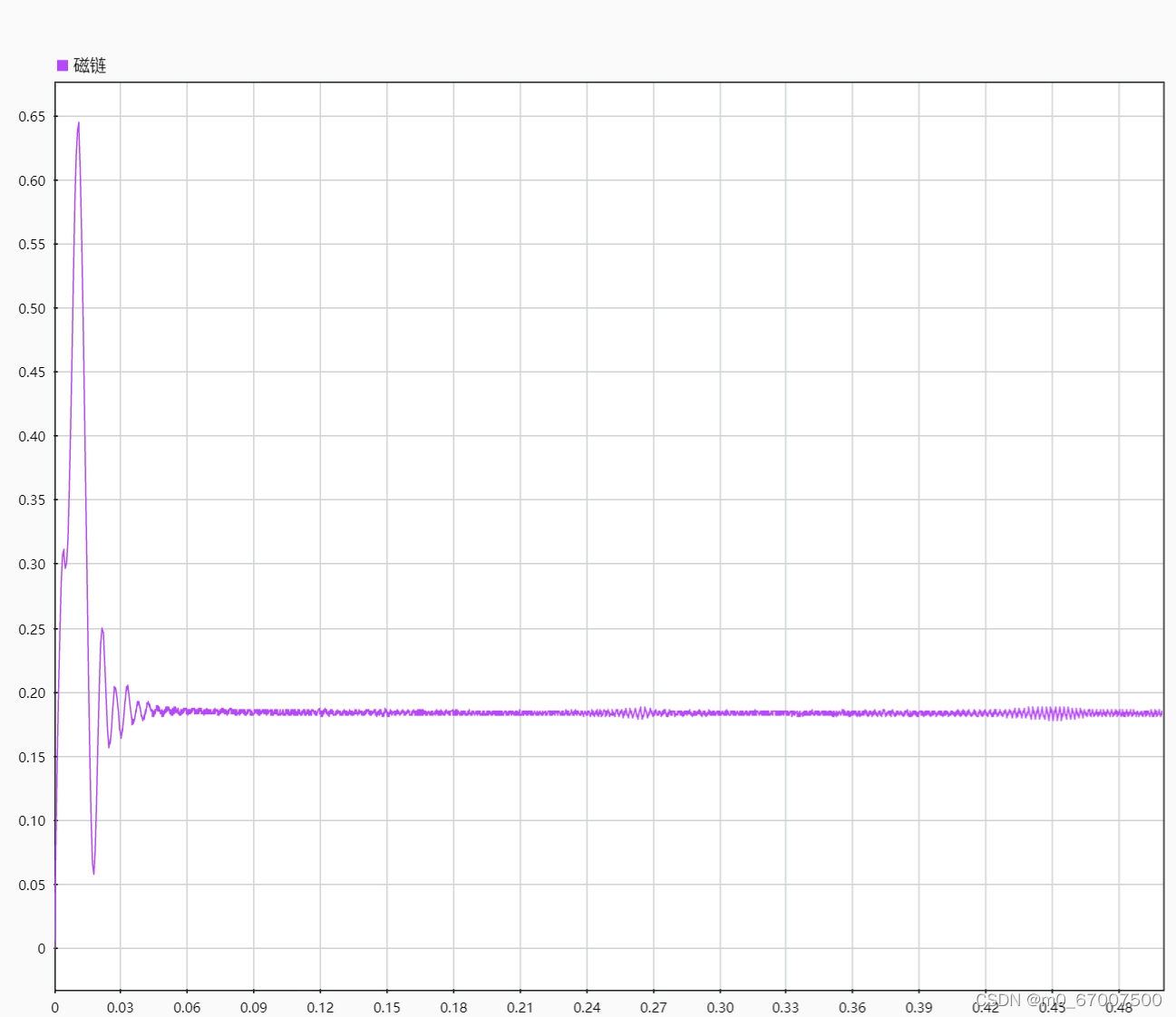
matlab simulink电机foc观测器模型,采用龙贝格观测器+PLL进行无传感器控制,其利用 PMSM 数学模型构造观测器模型,根据输出的偏差反馈信号来修正状态变量。 当观测的电流实现与实际电流跟随时,利用估算的反电势进行pll计算转子位置信息。 龙伯格观测器采用线性控制策略代替了 SMO 的变结构控制,有效避免了系统抖振,动态响快、估算精度高的优点。 YID:54806843623
PMSM永磁同步电机参数辨识仿真,适用于表贴式,内嵌式永磁同步电机
PMSM永磁同步电机参数辨识仿真,适用于表贴式,内嵌式永磁同步电机: 辨识内容: ① 定子电阻,精度在0.1%左右; ② DQ电感辨识(脉冲电压法),精度在0.02%左右; ③ 转子磁链辨识,精度在0.12%左右; 上述算法,是在实践工程中提炼出的算法,无复杂的矩阵计算,无复杂的滤波算法,TI ,ST 以及国产芯片都可实现,易于工程实现。 编号:9668662700227541旺仔电控