本文主要是介绍m基于GA遗传算法的PMSM永磁同步电机参数最优计算matlab仿真,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
目录
1.算法描述
2.仿真效果预览
3.MATLAB核心程序
4.完整MATLAB
1.算法描述
永磁同步电机(PMSM)基本结构为定子、转子和端盖。其中转子磁路结构是永磁同步电机与其它电机最主要的区别,其在很大程度上决定了永磁同步电机的实际性能指标。通常情况下,永磁同步电机的转子磁路结构分为:凸装式、嵌入式和内置式三种结构。目前为止,由于永磁同步电机优越的性能,其越来越受到国内外专家学者的重视,并广泛应用到了工业领域的各个方面。

![]()
遗传算法的优化目标可以用如下公式表示:

表示yai控制输出结果;变量ybi表示标准电机的控制输出结果。
基于遗传算法的优化设计方案是目前应用较为广泛的一种优化方法,其在各个工程应用领域具有较多的使用。特别是对于较为复杂的系统,其性能往往是收到诸多因素影响的,而为了达到系统的最佳性能,则需要搜索最佳的参数组合,使得系统具备高性能,低功耗,低成本等优势。而传统的多个参数的最优组合计算往往计算过程较为复杂,而且得到的参数组合也不一定是真实的最优参数,存在较多的问题,而采用遗传优化算法则可以得到提高搜索最优参数组合的效率,并使得参数组合尽可能的接近真实的最优解。
在工程上,通过将电机的设计转换为最优问题,通过数学规划的方法,并借助计算机编程实现算法的高效稳定的运算。GA遗传算法是目前应用最为广泛的全局优化算法,其可以有效解决局部优化问题,并且适用于多目标的优化问题。
遗传算法(Genetic Algorithm)是一类借鉴生物界的进化规律演化而来的随机化搜索方法[17]。它是由美国的J.Holland教授1975年首先提出,其主要特点是直接对结构对象进行操作,不存在求导和函数连续性的限定;具有内在的隐并行性和更好的全局寻优能力;采用概率化的寻优方法,能自动获取和指导优化的搜索空间,自适应地调整搜索方向,不需要确定的规则。遗传算法的这些性质,已被人们广泛地应用于组合优化、机器学习、信号处理、自适应控制和人工生命等领域,它是现代有关智能计算中的关键技术。因此,遗传算法本质上是一种搜索最优解的优化技术,其根据适应度函数进行优化,通过种群个体一代又一代的逼近来实现优化功能。
目前,遗传算法主要有如下几个方面的应用:
第一、目标函数的优化处理。目标函数的优化处理是遗传算法最为主要的应用之一,适用于单目标优化问题,多目标优化问题,线性目标优化问题以及非线性目标处理问题等多个领域。
第二、生产调度的优化处理。通过遗传算法可以实现较为复杂的同步电机优化设计问题。
第三、组合优化处理。由于优化问题的日益复杂化,组合优化的优化处理方式得到越来越多的应用,在控制领域,图像处理以及机器学习方面都有着广泛的应用。而遗传算法在求解组合优化问题方面有着较强的计算能力。
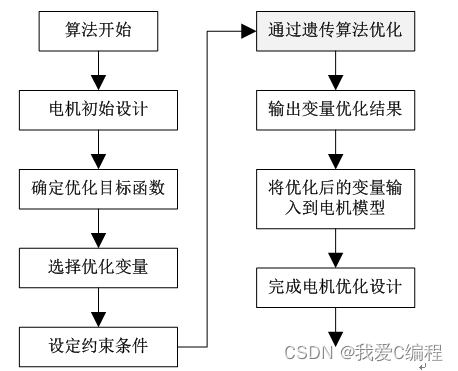
基于遗传算法的电机优化设计流程图如下所示:
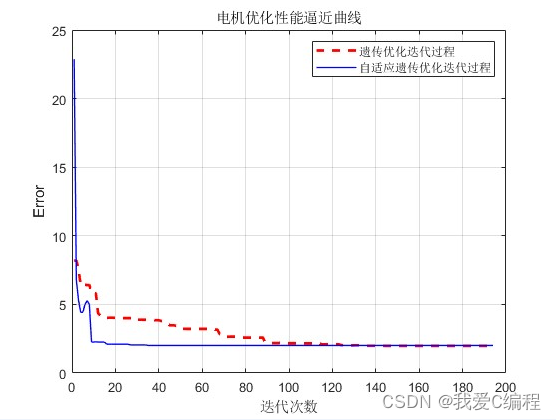
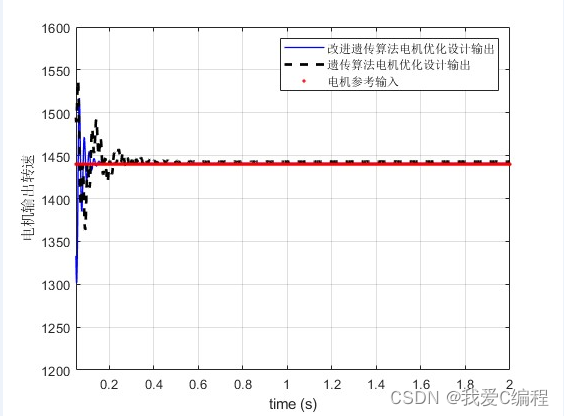
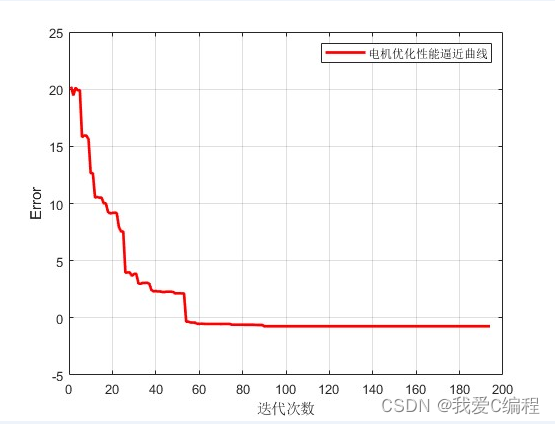
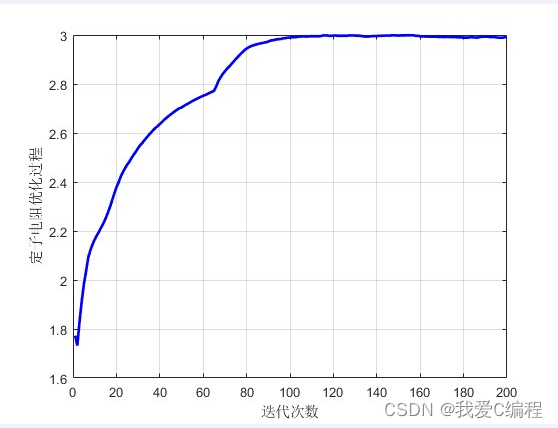
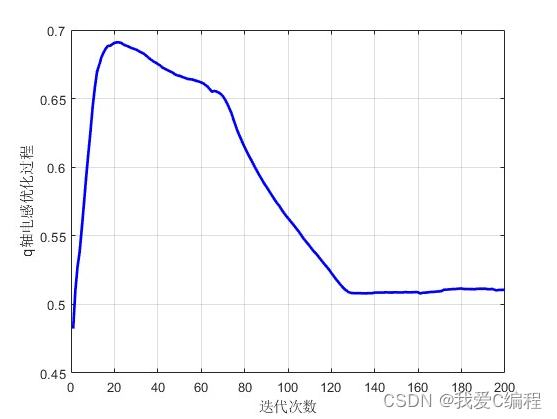
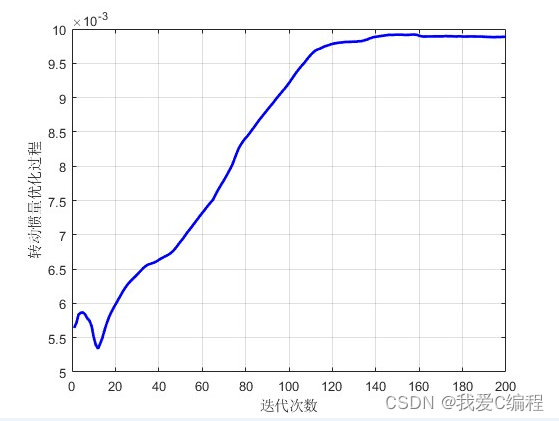
2.仿真效果预览
matlab2022a仿真如下:


3.MATLAB核心程序
%定义初始值
Rs = 0.712; %转子电阻
Rr = 3.789; %定子电阻
M = 0.295; %磁链
Ld = 0.311; %d轴电感
Lq = 0.311; %q轴电感
p = 2.0; %极对数
J = 0.003; %转动惯量
%%
%下面开始使用遗传优化算法
%根据遗传算法进行参数的拟合
MAXGEN = 200;
NIND = 20;
Nums = 7;Chrom = crtbp(NIND,Nums*10);
Sm = 0.001;
Areas = [Sm,Sm,Sm,Sm,Sm,1,Sm;1,4,1,1,1,4,0.01];FieldD = [rep([10],[1,Nums]);Areas;rep([0;0;0;0],[1,Nums])];Data1 = zeros(NIND,Nums);
Data2 = zeros(MAXGEN,Nums); gen = 0;
% randperm(A*B*C)
for a=1:1:NIND %计算对应的目标值epls = func_obj(Rs,Rr,M,Ld,Lq,p,J);E = epls;Js(a,1) = E;
endObjv = (Js+eps);
gen = 0; %%
Rs3 = []; %转子电阻
Rr3 = []; %定子电阻
M3 = []; %磁链
Ld3 = []; %d轴电感
Lq3 = []; %q轴电感
p3 = []; %极对数
J3 = []; %转动惯量Rs4 = []; %转子电阻
Rr4 = []; %定子电阻
M4 = []; %磁链
Ld4 = []; %d轴电感
Lq4 = []; %q轴电感
p4 = []; %极对数
J4 = []; %转动惯量
while gen < MAXGEN; genPe0 = 0.995;pe1 = 0.005; FitnV=ranking(Objv); Selch=select('sus',Chrom,FitnV); Selch=recombin('xovsp', Selch,Pe0); Selch=mut( Selch,pe1); phen1=bs2rv(Selch,FieldD); size(Objv)size(Chrom)size(FitnV)Rs = [];Rr = []; M = []; Ld = [];Lq = []; p = []; J = []; for a=1:1:NIND Rs(a) = phen1(a,1);Rr(a) = phen1(a,2); M(a) = phen1(a,3); Ld(a) = phen1(a,4); Lq(a) = phen1(a,5); p(a) = floor(phen1(a,6))+1; J(a) = phen1(a,7); %计算对应的目标值epls = func_obj(Rs(a),Rr(a),M(a),Ld(a),Lq(a),p(a),J(a));E = epls;JJ(a,1) = E;end Objvsel=(JJ); [Chrom,Objv]=reins(Chrom,Selch,1,1,Objv,Objvsel); gen=gen+1; %保存参数收敛过程和误差收敛过程以及函数值拟合结论index1 = isnan(JJ);index2 = find(index1 == 1);JJ(index2) = [];Error2(gen) = min(JJ);[VV,II]=min(JJ);Rs3(gen) = [mean(Rs)]; %转子电阻
Rr3(gen) = [mean(Rr)]; %定子电阻
M3(gen) = [mean(M)]; %磁链
Ld3(gen) = [mean(Ld)]; %d轴电感
Lq3(gen) = [mean(Lq)]; %q轴电感
p3(gen) = [mean(p)]; %极对数
J3(gen) = [mean(J)]; %转动惯量if gen<=64Rs4 = [Rs4,mean(Rs3(1:gen))]; %转子电阻Rr4 = [Rr4,mean(Rr3(1:gen))]; %定子电阻M4 = [M4,mean(M3(1:gen))]; %磁链Ld4 = [Ld4,mean(Ld3(1:gen))]; %d轴电感Lq4 = [Lq4,mean(Lq3(1:gen))]; %q轴电感p4 = [p4,mean(p3(1:gen))]; %极对数J4 = [J4,mean(J3(1:gen))]; %转动惯量
elseRs4 = [Rs4,mean(Rs3(gen-64:gen))]; %转子电阻Rr4 = [Rr4,mean(Rr3(gen-64:gen))]; %定子电阻M4 = [M4,mean(M3(gen-64:gen))]; %磁链Ld4 = [Ld4,mean(Ld3(gen-64:gen))]; %d轴电感Lq4 = [Lq4,mean(Lq3(gen-64:gen))]; %q轴电感p4 = [p4,mean(p3(gen-64:gen))]; %极对数J4 = [J4,mean(J3(gen-64:gen))]; %转动惯量
endend
[V,I] = min(JJ);
V
Rs_best = Rs(I)
Rr_best = Rr(I)
M_best = M(I)
Ld_best = Ld(I)
Lq_best = Lq(I)
p_best = p(I)
J_best = J(I)
save result.mat Rs_best Rr_best M_best Ld_best Lq_best p_best J_best
02_042m4.完整MATLAB
V
这篇关于m基于GA遗传算法的PMSM永磁同步电机参数最优计算matlab仿真的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!



