本文主要是介绍PMSM矢量控制笔记(1.3)——直流电机的旋转原理,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
前言:
想要探究这个问题是源于一直以来的一个疑问,我们总是聊矢量控制非常的厉害,性能非常的优异,SVPWM这种调制方式使得电机输出性能很优秀,所以我们一直就这么用着,但是我们好像很少去探究永磁同步电机在被驱动的过程中,到底是怎么转起来的?比如电机旋转到1000rpm,我们非常习惯这样去描述并理解电机运行状态,但是实际上转速是一个时间尺度较长的物理单位,他描述的是一个长时间片在电机上发生的物理现象,他并没有阐述旋转1000rpm中间的暂态过程是怎么样的,也并没有让我们理解电机是怎么转到了1000rpm这个状态的。实际上在驱动电机由静止-旋转的过程中,需要经过非常多个暂态过程,去理解这些暂态过程,有利于我们对整体控制算法的理解与优化控制。
1 直流电机的旋转原理
此部分内容我们主要补充电机运行原理相关的知识,去回答“电机是如何转起来的”问题,为了从源头上去理解电机旋转的原理,我们可以回溯到高中的知识中去,去理解电与磁之间、电能与机械能之间的交替转换。
1.1 安培定则
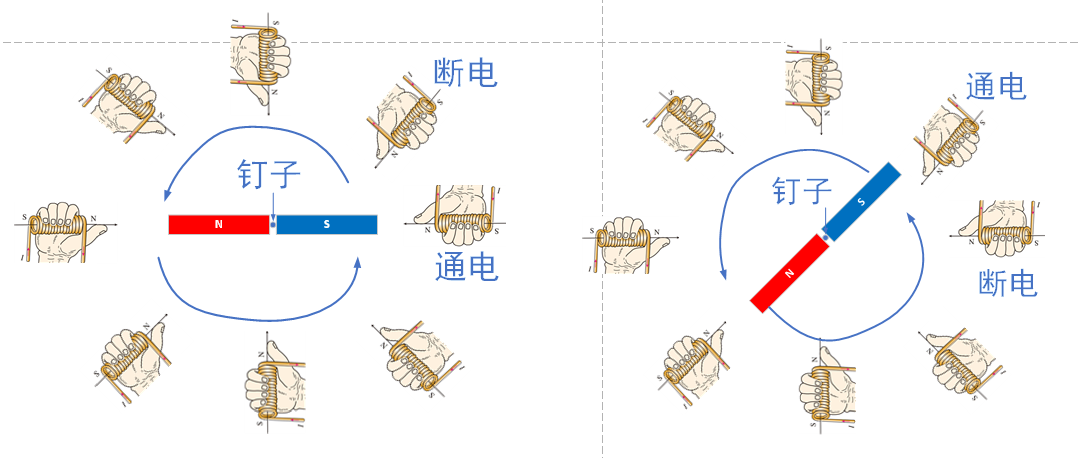
首先奥斯特在实验中偶然发现的物理定律——安培定则,也叫右手螺旋定则,是表示电流和电流激发磁场的磁感应线方向间关系的定则。安培定则的定义:当导线是直导线时,若大拇指指向电流的方向,四指环握的方向表示磁场方向。当导线为通电螺线管时,若四指环握的方向指向电流方向,则大拇指指向N极性方向。在电机控制中,一般安培定则在螺线管中的应用与电机相关性更大,因为交流电机的绕组实际上就是由一圈圈导线组成;而安培定则在通电直导线中的应用仅在电流采样中才有涉及。

基于安培定则,我们可以想象一下假如有一个永磁体放置在桌子上并且中心被一根钉子固定住,在这个永磁体周围围满了一圈的这样的螺线管,由于N极和S极会相互吸引,N极于N极之间会相互排斥。
基于安培定则,我们可以想象一下假如有一个永磁体放置在桌子上并且中心被一根钉子固定住,在这个永磁体周围围满了一圈的这样的螺线管,由于N极和S极会相互吸引,如果我们依次对从右到左的螺线管进行上电,那么永磁体就会绕着钉子旋转起来。虽然这个假设非常简单,但是实际上复杂的三相交流电机运行过程的本质原理与这个是完全一致的。
1.2 弗莱明左手定则与安培力
左手定则是英国电机工程师约翰·安布罗斯·弗莱明提出的,1885年当弗莱明在英国伦敦大学任教时,由于学生经常弄错磁场、电流和受力的方向,他想出了一个简单的方法帮助同学记忆——左手定则,该定则是判断通电导线处于磁场中时,所受安培力的方向、磁感应强度B的方向以及通电导体的电流I的方向三者之间关系的定律。左手定则一般用于判断通电导体在磁场中受力的方向,如下图所示,让磁感线垂直于手掌并从掌心进入,并使得四指指向电流的方向,则大拇指指向的方向是通电导线在磁场中所受安培力的方向。
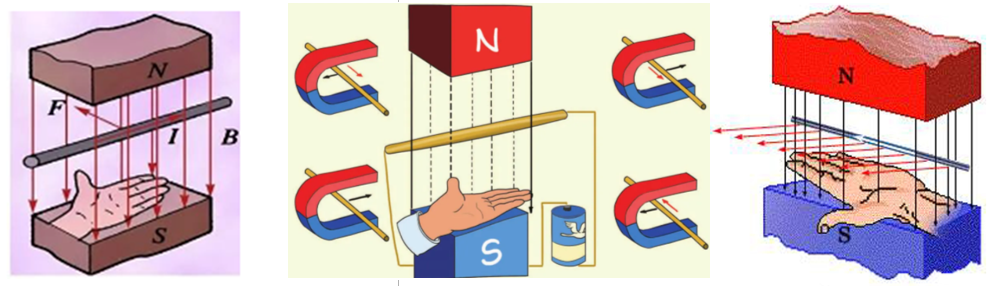
安培力是通电导体在磁场中受到的作用力,由法国物理学家安培首先通过实验确定。其文字表述为:以电流强度为I、长度为L的直导线,放置于磁感应强度为B的均匀磁场中,导线受到的安培力大小等于

式中 α 为导线中的电流方向和磁场B方向之间的夹角 ,F、I、B、L的单位分别是N*m、A、T、m 。任意形状的导线都可以通过左手定则判定其在磁场中所受力的方向,同时任意形状的导线都可以看作无穷个直流电流单位在磁场中所受安培力的矢量和值。
1.3 有刷直流电机的运行原理
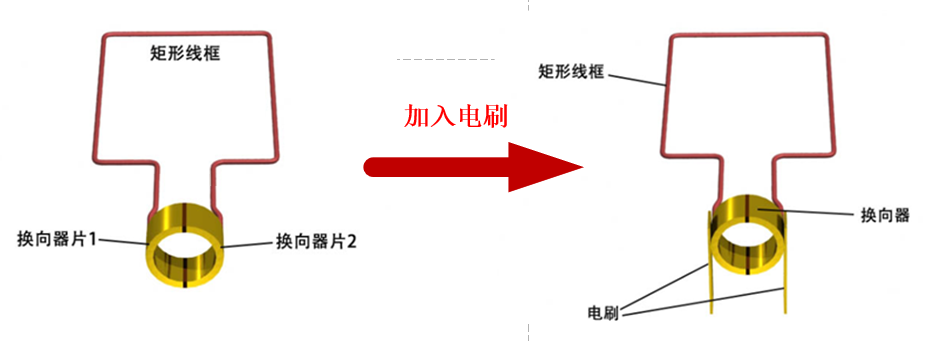
在学习复杂的三相交流电机的旋转原理前,有必要对结构相对简单的直流电机原理进行补充。有刷直流电动机的运行原理与安培定则、安培力息息相关,上两小节的讲解就是为了方便大家理解此部分的内容。(此小节部分内容主要借鉴www.pengky.cn内直流电机相关内容)如图下左图所示,这是一个方形的导线框,在线端头焊接有两片半圆周形状的铜片,两个铜片中间的褐色部分是绝缘或中空的,该部分被称为换向器。若在两个半圆周形状的铜片两侧夹上一对固定不动的弹性铜片,则可通过弹性铜片为矩形线框供电,两个弹性铜片被称为电刷,如下右图所示。
进一步的对结构进行组装,若在两个弹性铜片——电刷上通入直流电,则线框中就会产生电流。如下左所示。通入直流电后,在导线框中就出现了如图中绿色箭头所示的直流电,此时外部还不存在任何的磁场,导线圈处于短路运行中。若在通入直流电后,在矩形线框的周围加入一个外部磁场,导线框就会因安培力产生运动趋势。如下右图所示,在线框的两侧放置一对磁极,形成磁场,由于线框内导线已存在直流电流,两侧导线就会受到磁场的作用力,其受力方向依据左手定则进行判断,如下右图中绿色箭头所示。

图中直流电源红色为正极,绿色为电源负极,导线旁的红色箭头为电流方向。通过左手定则可知,矩形线圈左侧部分导线在磁场中所受安培力的方向是垂直向上的,矩形线圈右侧部分导线在磁场中所受安培力的方向是垂直向下的,在两端安培力的作用下,通电矩形线框就会绕着换向器的圆心开始旋转。
1.4 维持持续旋转的机制
上面的讲解仅仅说明了矩形线框在磁场中受力的情况,以及运动趋势的产生,但是如何实现持续的旋转,还是比较模糊的。因此针对这个问题讲探究一下直流电动机是如何持续运行起来的。下图展示了直流电机旋转过程中较为关键的3个暂态过程,
第一个暂态:矩形线框平面与磁感应线方向处于平行状态,该状态矩形线框受到左侧向上、右侧向下的安培力,矩形线框出现旋转趋势;
第二个暂态:磁感应线恰好垂直穿过矩形线框,此时左右两侧电刷正好与绝缘部分相连,此时矩形线框中不存在任何电流,线框不受力,但由于从第一个暂态到第二个暂态过程中矩形线框会经历旋转加速的过程,虽然到第二个暂态时线框中不存在电流,也不受到力的作用,但旋转的惯性会使得矩形线框冲过中间“无电”且“不受力”的状态进入暂态三;
第三个暂态:矩形线框重新与电刷相连,并在直流电源的作用下重新出现电流。由于线框仍然处在磁场中,则线框两侧继续收到安培力的作用继续旋转。
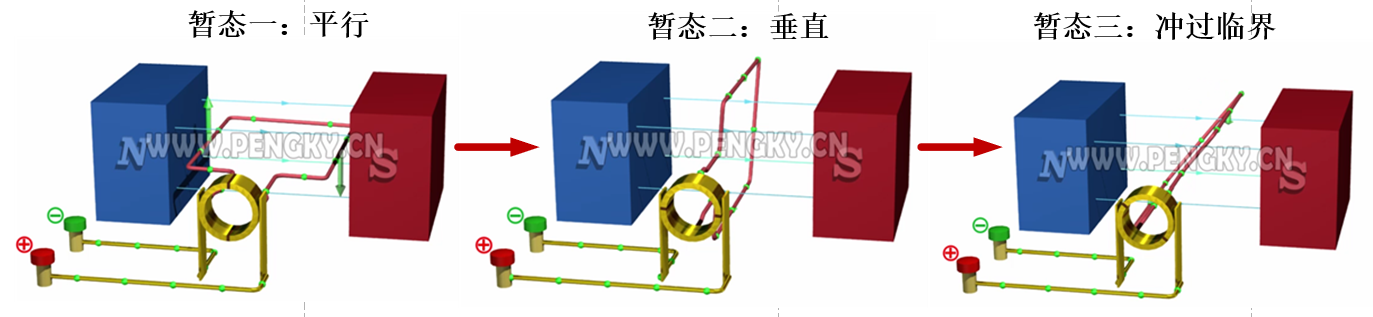
其中一个非常巧妙的机构就是换向器和电刷,我们可以看到第一个暂态中左侧线框的电流是由纸面内往直面外流,在冲过无电的第二暂态后,原本左侧的线框进入右侧,此时导线内电流方向是从纸面外流向纸面内,对这段导线而言,他的电流方向是在此次旋转中出现“换向”。正是这段换向操作,使得矩形线框能够持续保持左侧受力向上,右侧受力向下的状态,因这种受力状态的保持,矩形线框则会绕着换向器的圆心保持一个方向持续运行,这也是换向器名称的由来。
小结:
虽然这些操作非常的原始,但是在科技不那么发达的年代,在法拉第发现电磁感应现象后,能够奇思妙想出换向器与电刷的结构,使得通电导线能够持续旋转的操作,实属是天才的灵光,我们应该记住这个人的名字——托马斯·达文波特(Thomas Davenport),是他首先提出和建立了能够转动和机械换向的直流电机。正是直流电机的推广和应用,才让人们对这种电能产生机械能的装置产生了信任和以来,也为后续交流电机的出现打下坚实的基础。
系列文章链接:
PMSM矢量控制笔记(1.1)——永磁同步电机的本体结构
PMSM矢量控制笔记(1.2)——隐机电机与凸极电机的详细区别
PMSM矢量控制笔记(1.3)——直流电机的旋转原理
PMSM矢量控制笔记(1.4)——交流电机的旋转原理
写作不易,希望大家帮忙点个赞,一键三连哦~
这篇关于PMSM矢量控制笔记(1.3)——直流电机的旋转原理的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!



