滑膜专题

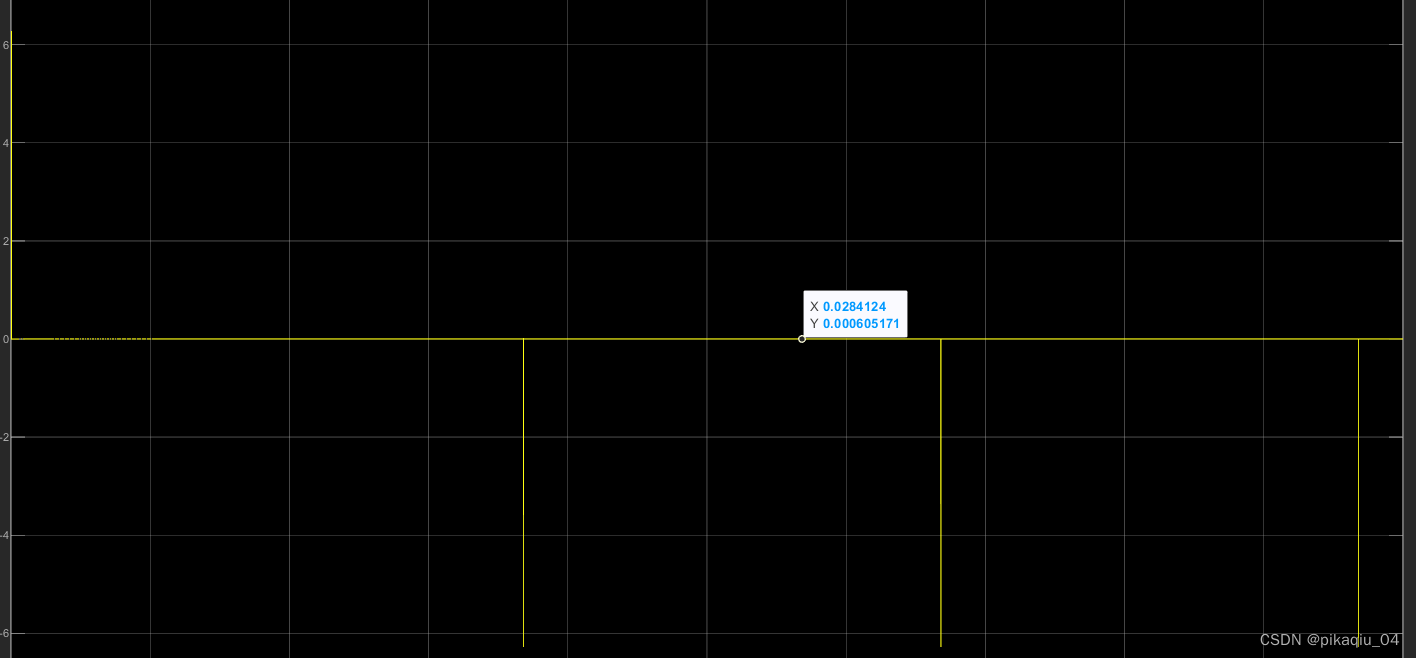
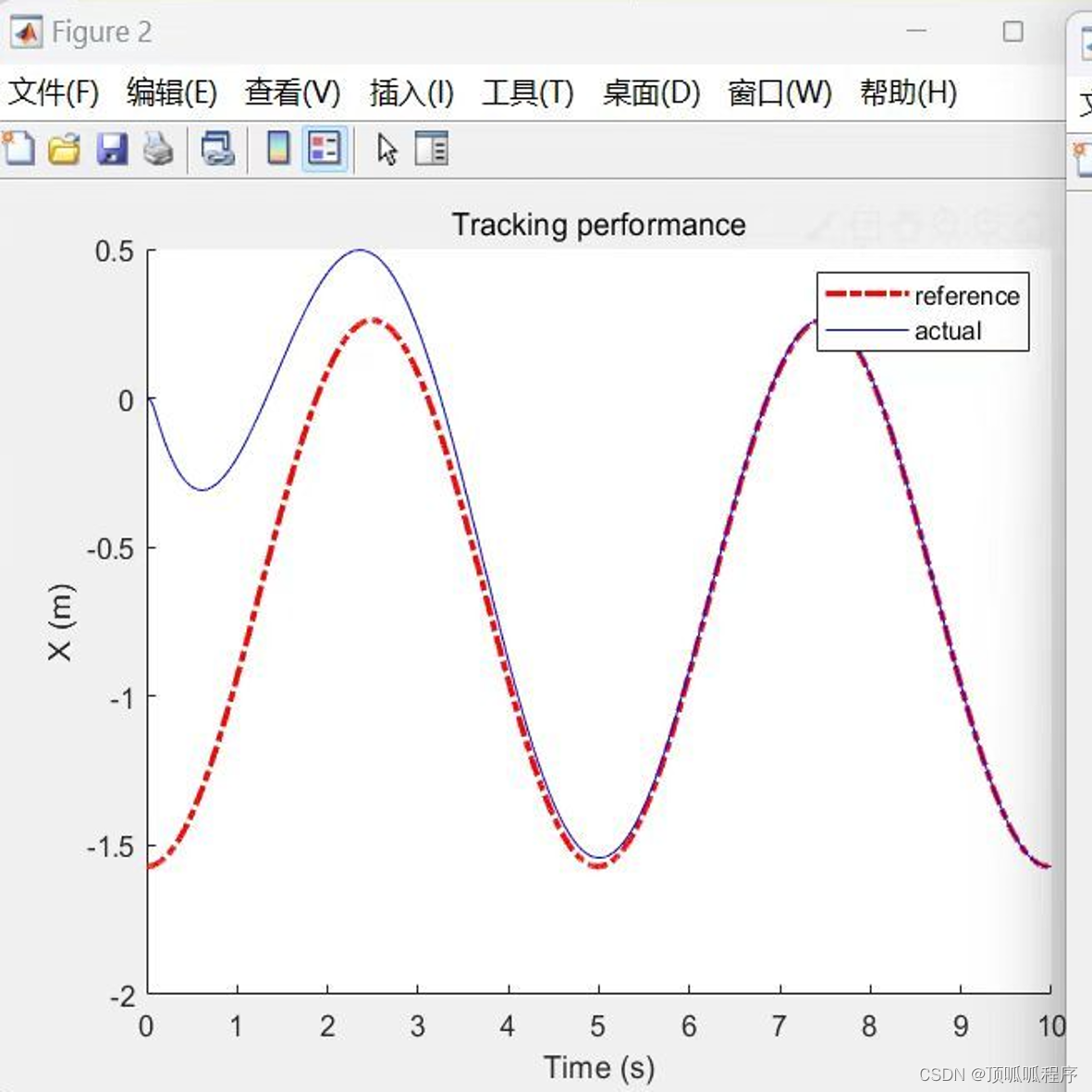
2-86 基于matlab的时变滑膜仿真
基于matlab的时变滑膜仿真,可应用于非线性控制,输出角度和速度跟踪,并与理论结果比较,并得到控制误差结果。具有传统二阶滑模、相对阶1螺旋算法、相对阶1超螺旋算法。程序已调通,可直接运行。 2-86 相对阶1螺旋算法 - 小红书 (xiaohongshu.com)
PMSM 永磁同步电机滑膜控制 SVPWM矢量控制 matlab simulink 仿真
仿真搭建平台: (1)该模型采用matlab/simulink 2016b版本搭建,使用matlab 2016b及以上版本打开最佳; (2)该模型已经提前转换了各个常用版本(最低为matlab2012b),防止出现提示版本过高的情况。 模型截图: 算法介绍: (1)仿真模型由直流源、三相逆变桥、永磁同步电机(PMSM)、转速外环滑膜控制器、电流内环PI控制器、Park变换模块、Clark变
基于滑膜观测器锁相环(SMO-PLL)的无传感电机控制simulink仿真
基于滑膜观测器-锁相环的无传感电机控制仿真 仿真图搭建FOC对比SMO接入反馈后的对比总结补充 波形图都直接取自simulink-scope,均未做美化(doge)。 仿真图搭建 观前提示:原理部分请参考袁雷《现代永磁同步电机控制原理及MATLAB仿真》的公式推导。 整体结构: SMO-PLL: SMO: PLL: FOC对比 搭建完模型后先看看FOC

基于自适应滑膜观测器的永磁同步电机的无位置传感器控制仿真
1、自适应滑模观测器算法 对于表贴式三相PMSM,重写静止坐标系下的电流方程为 为了设计SMO,首先定义滑模面函数为 设计自适应SMO为 将两个电流方程相减可得 由于系统进人滑模面后,即有 所以可得到 反电动势的自适应律设计为 为了证明自适应SMO的稳定性,定义李雅普诺夫函数为 由于机械时间常数远大于电气时间常数,所以认为转速在一个估算周期内不变,则由自适应律可得 将上式代入
18基于matlab的二阶动态系统的滑膜控制,程序已调通,可直接运行。标价为程序价格,不包含售后。程序保证可直接运行。
基于matlab的二阶动态系统的滑膜控制,程序已调通,可直接运行。标价为程序价格,不包含售后。程序保证可直接运行。 18matlab滑膜控制 (xiaohongshu.com)
18基于matlab的二阶动态系统的滑膜控制,程序已调通,可直接运行。标价为程序价格,不包含售后。程序保证可直接运行。
基于matlab的二阶动态系统的滑膜控制,程序已调通,可直接运行。标价为程序价格,不包含售后。程序保证可直接运行。 18matlab滑膜控制 (xiaohongshu.com)
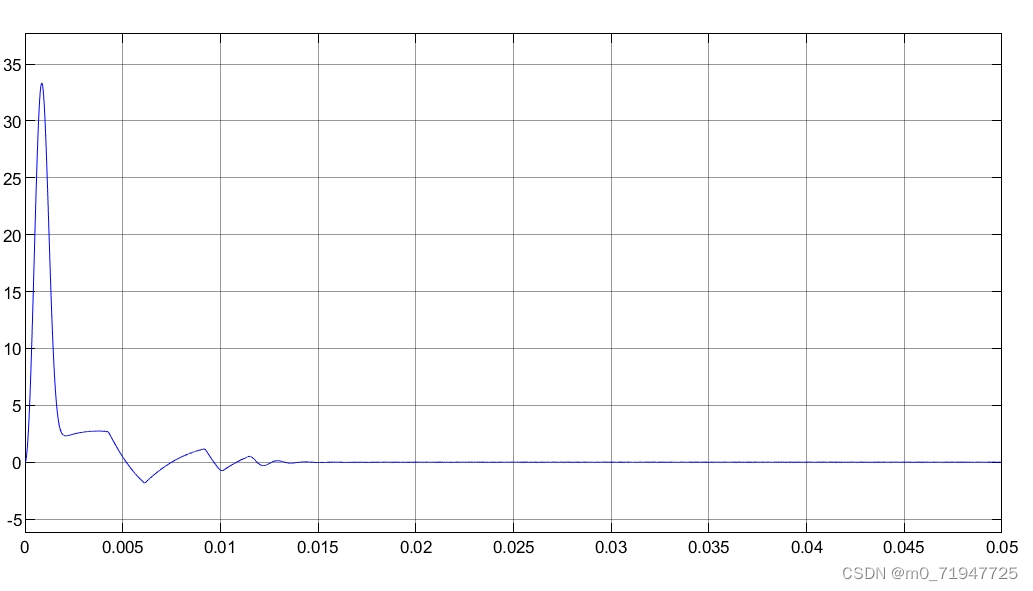
该模型在静止坐标系下采用滑膜观测器进行无传感器控制,相比反正切引入了PLL对转子位置进行提取
该模型在静止坐标系下采用滑膜观测器进行无传感器控制,相比反正切引入了PLL对转子位置进行提取,同时也将速度进行观测,从仿真可以看出,PLL观测的更加平滑。 ID:8788669889797797Keepmoving