本文主要是介绍基于滑膜观测器锁相环(SMO-PLL)的无传感电机控制simulink仿真,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
基于滑膜观测器-锁相环的无传感电机控制仿真
- 仿真图搭建
- FOC对比
- SMO接入反馈后的对比
- 总结
- 补充
波形图都直接取自simulink-scope,均未做美化(doge)。
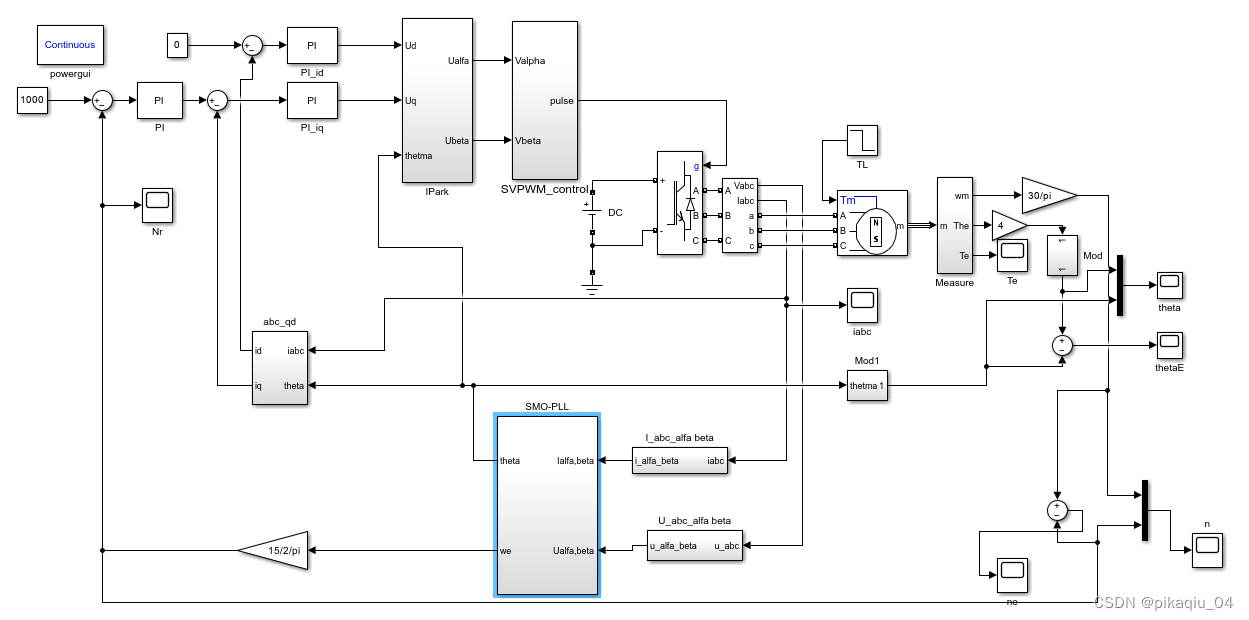
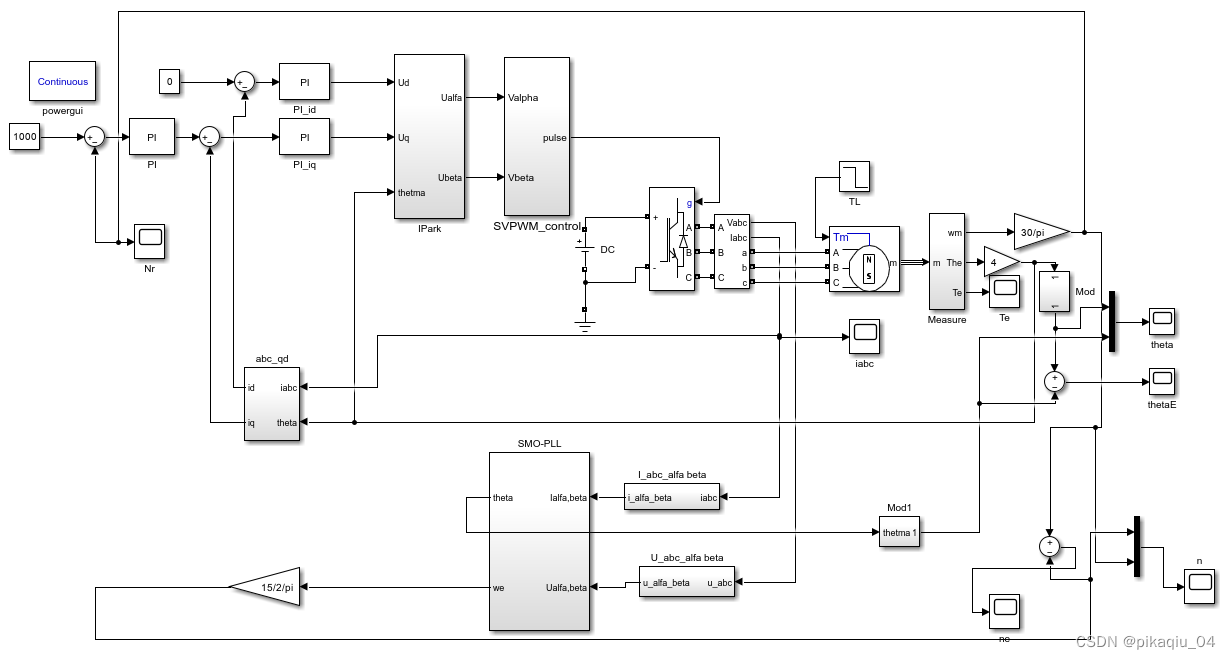
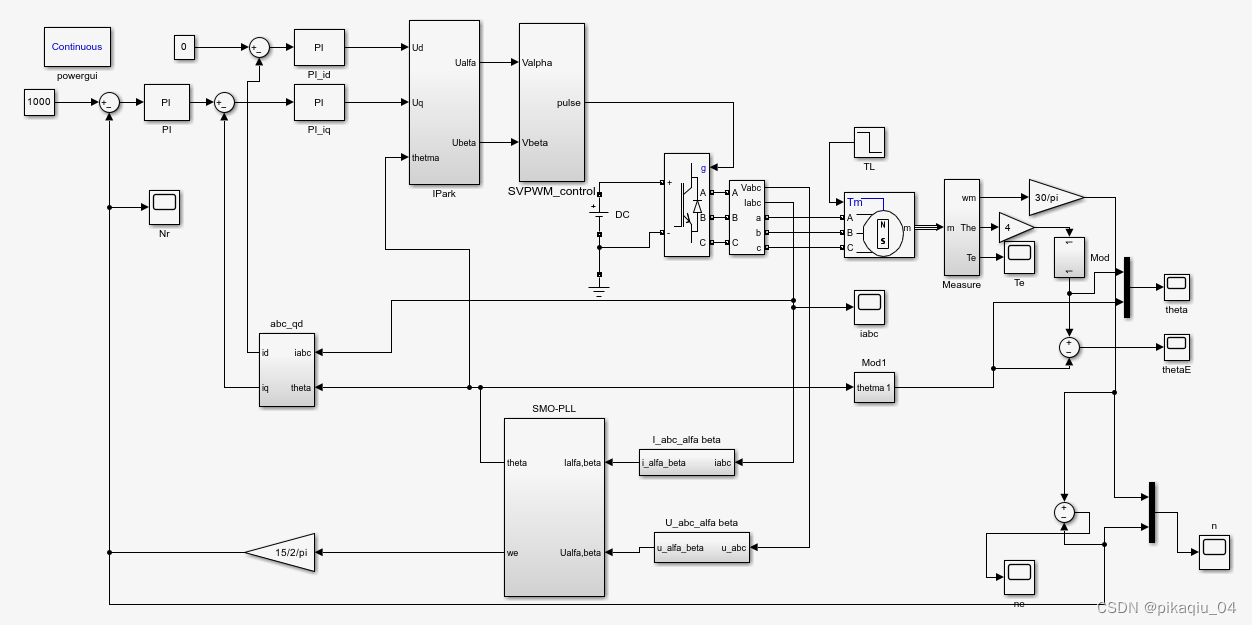
仿真图搭建
观前提示:原理部分请参考袁雷《现代永磁同步电机控制原理及MATLAB仿真》的公式推导。
整体结构:
SMO-PLL:
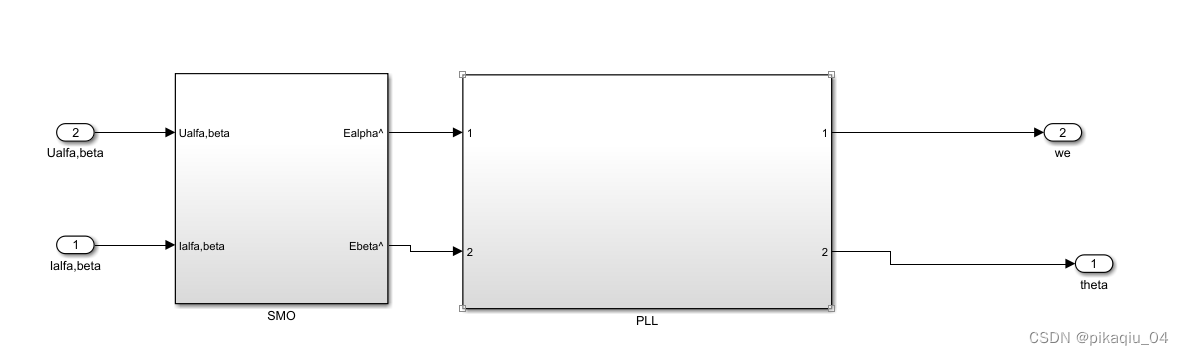
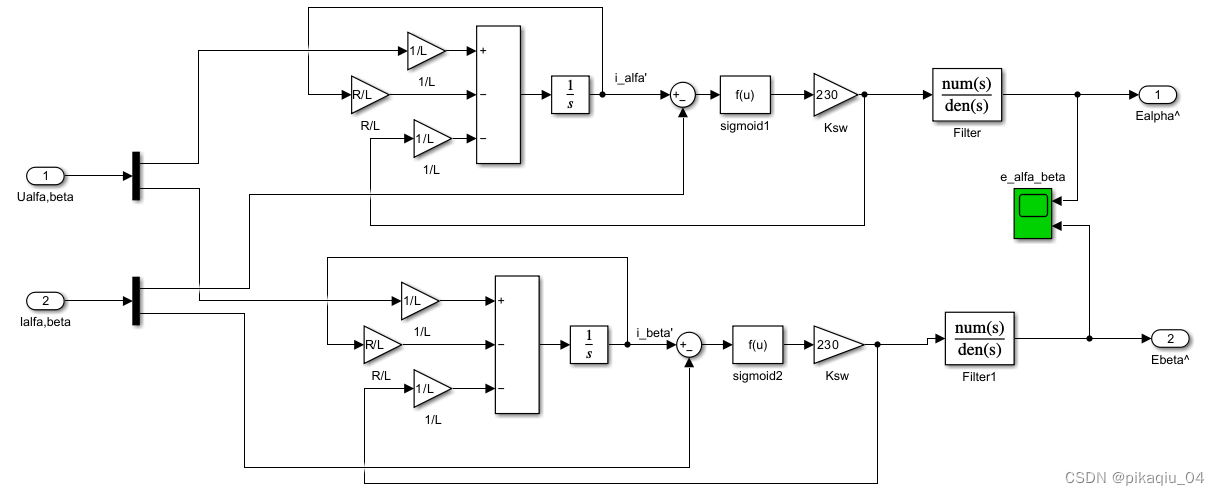
SMO:
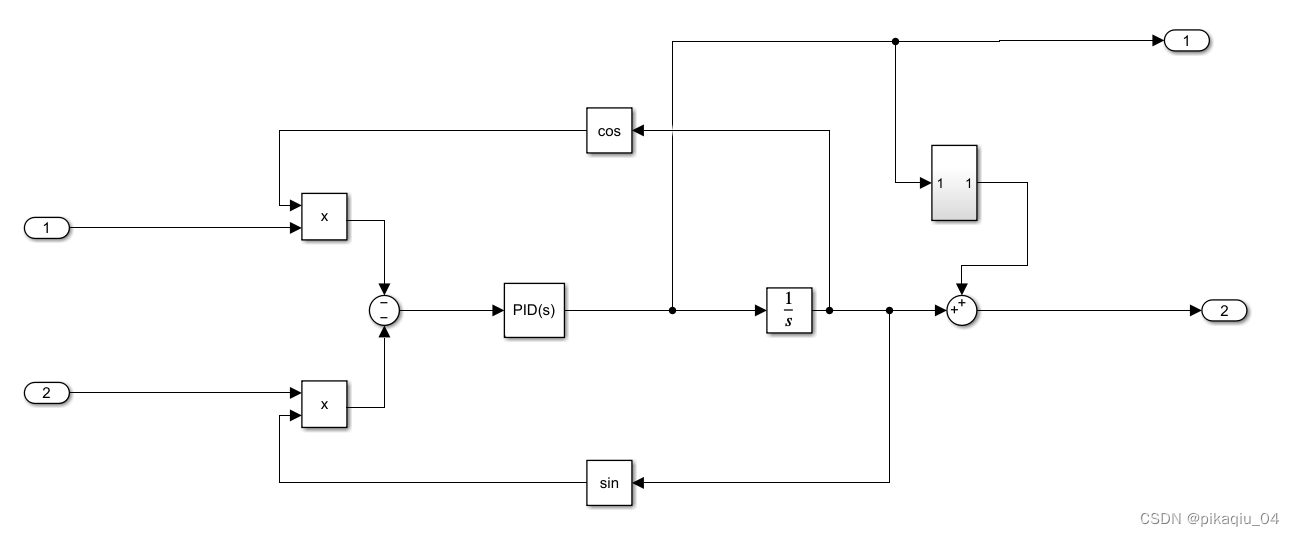
PLL:
FOC对比
搭建完模型后先看看FOC参数下的结果以及SMO-PLL的估计效果。
实际位置速度与估计的位置速度在反馈部分切换一下就好了如下图所示。
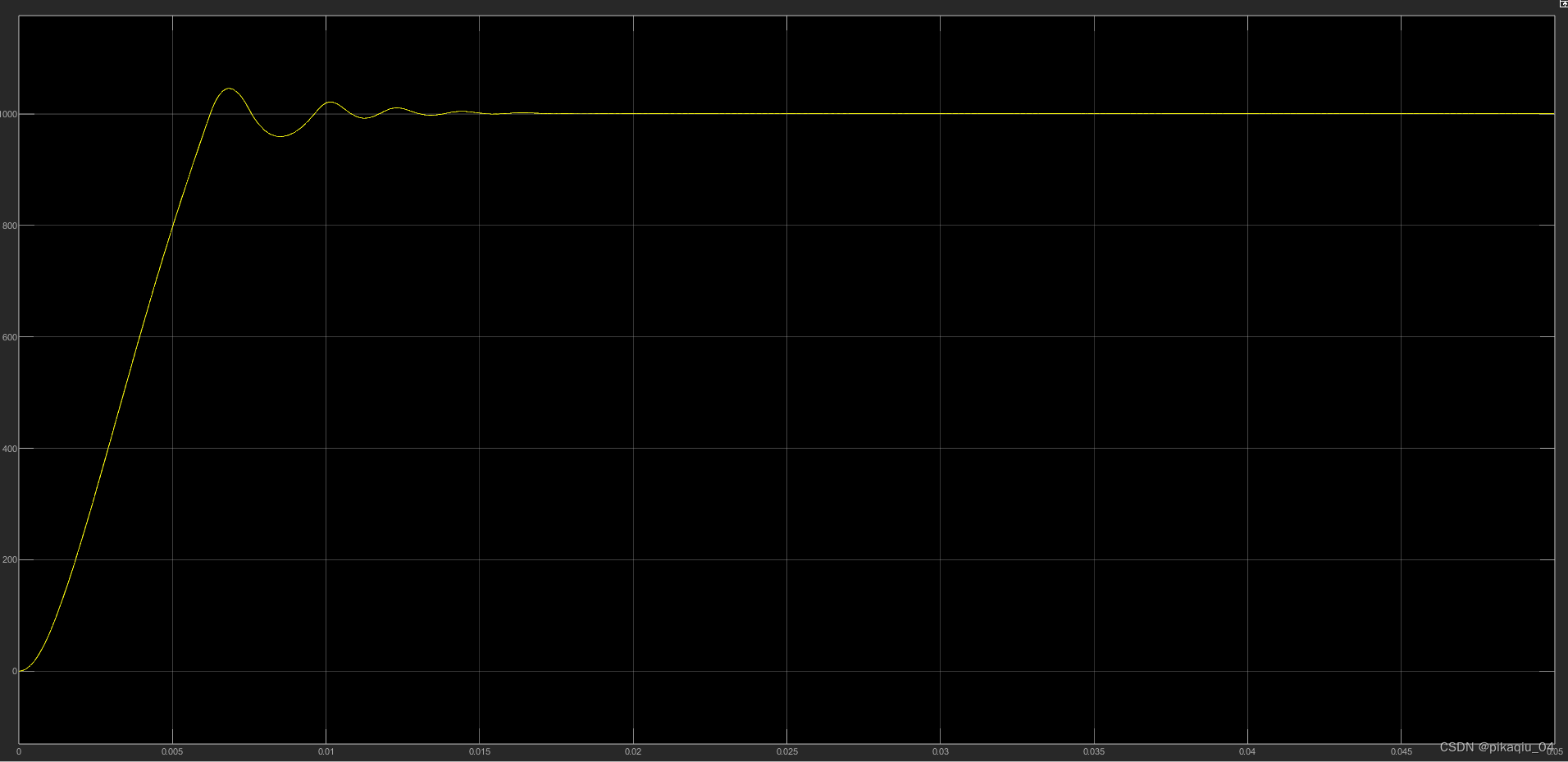
本节的结果图SMO均未接入到反馈部分。通过FOC运行的实际数据观测SMO估计是否合理。
FOC转速图
FOC与滑膜估计出来的转速图
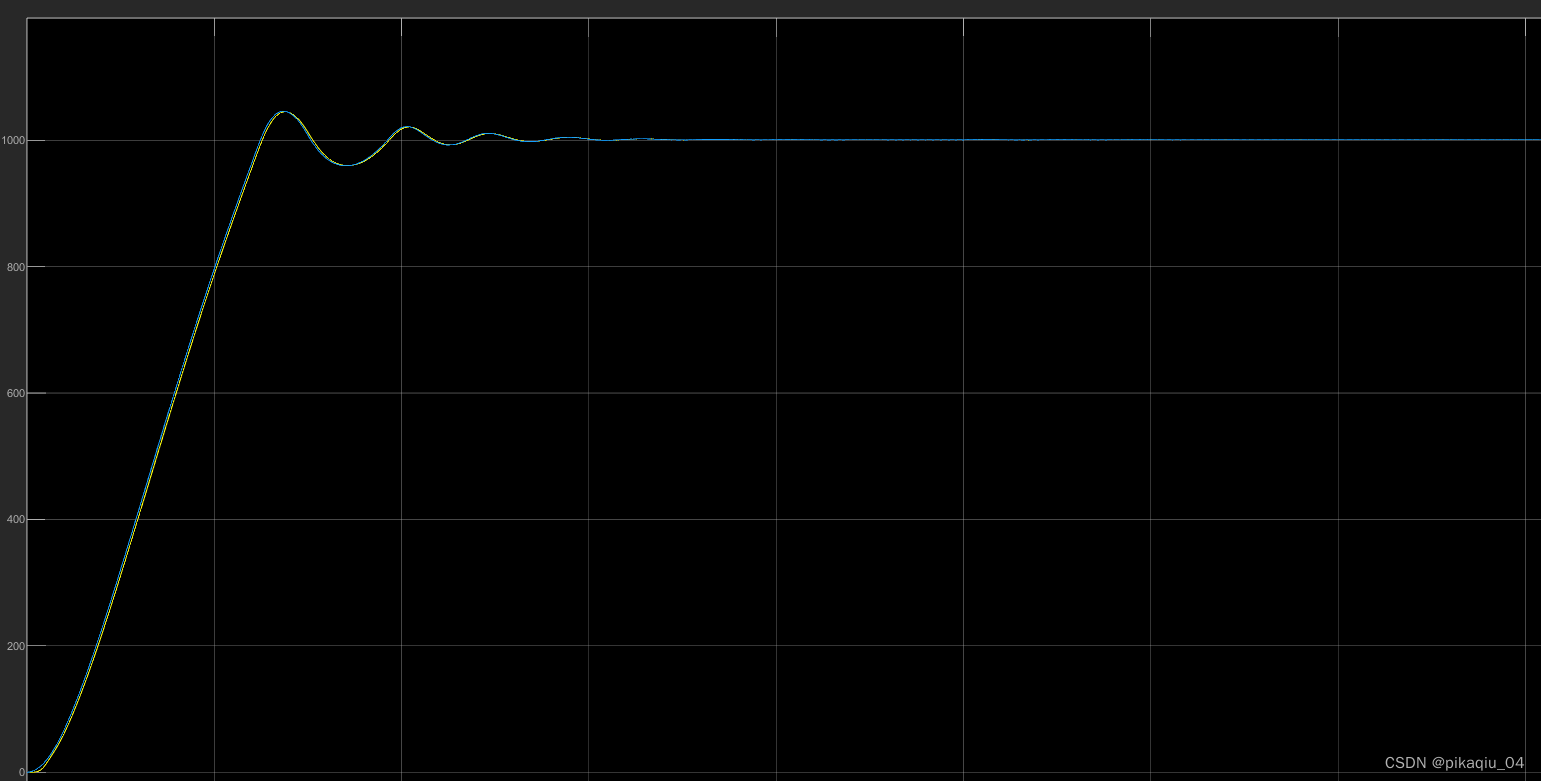
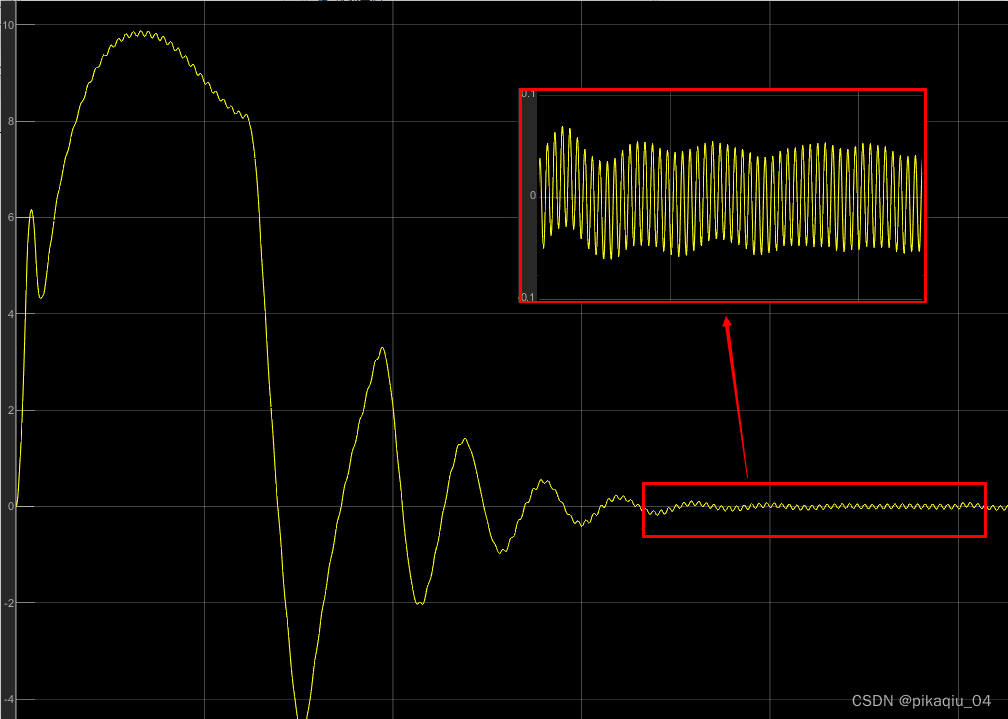
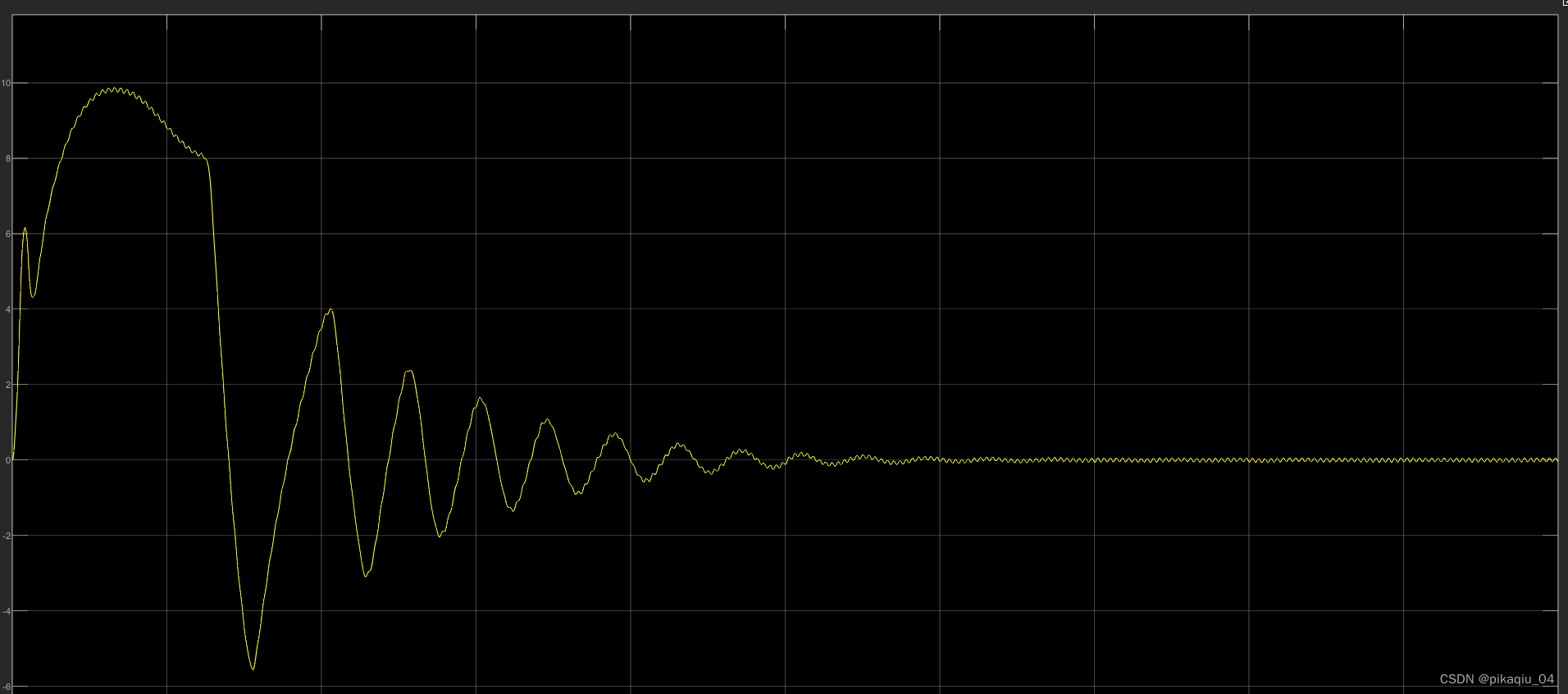
SMO估计速度与实际的误差图如下:
两者的位置关系如下:
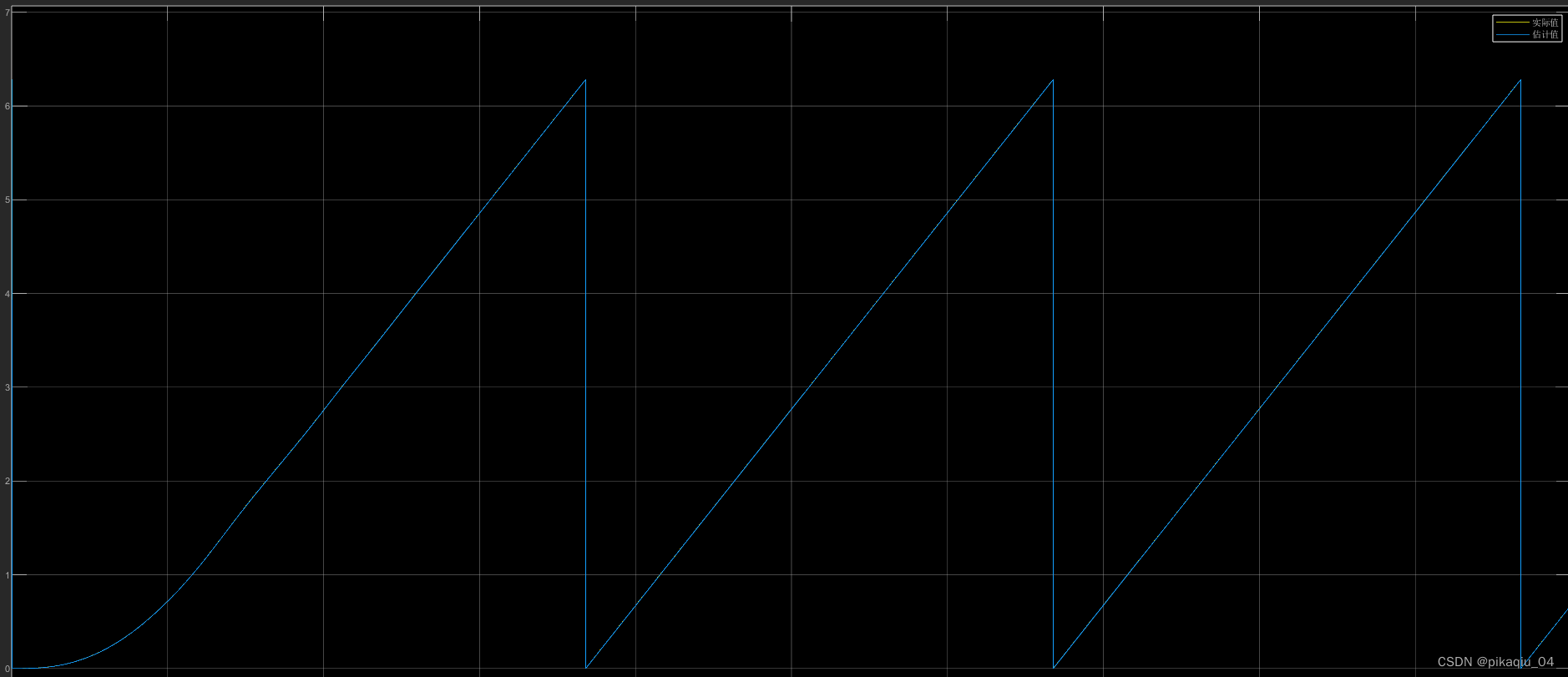
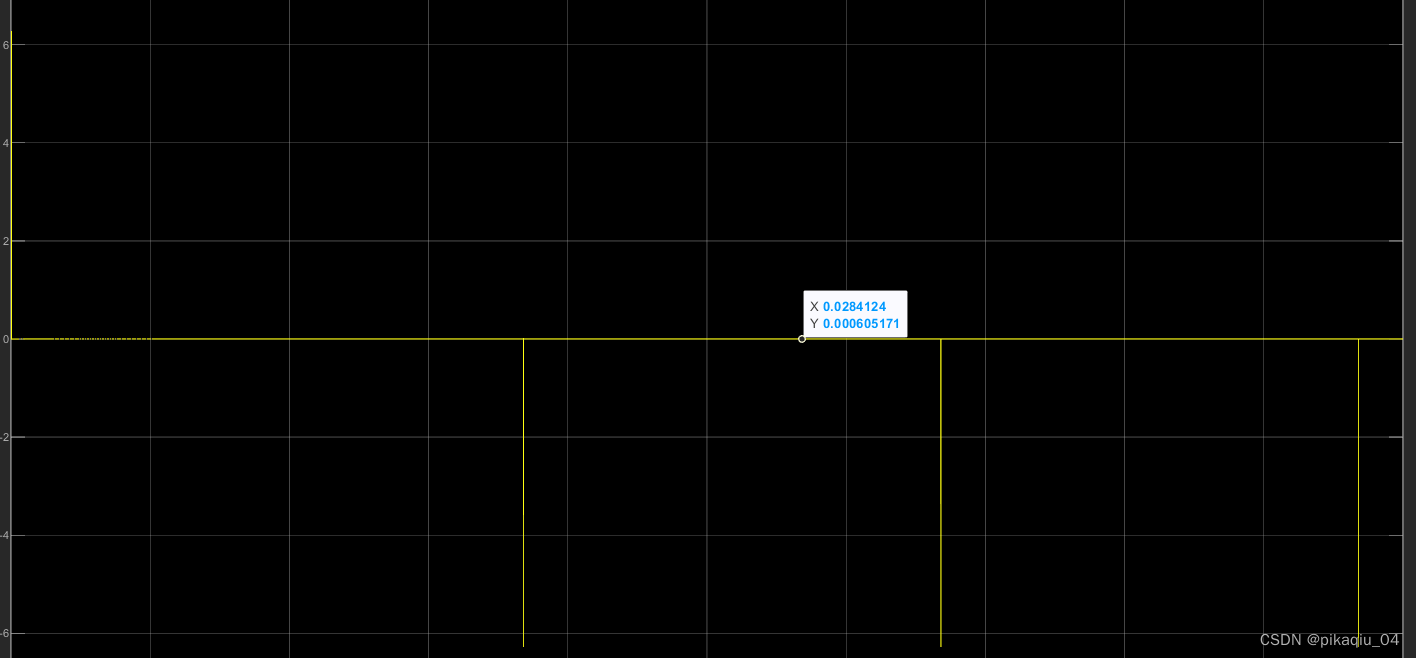
位置估计误差如下,相比于arctan法(约0.02),滞后非常小约6e-4。
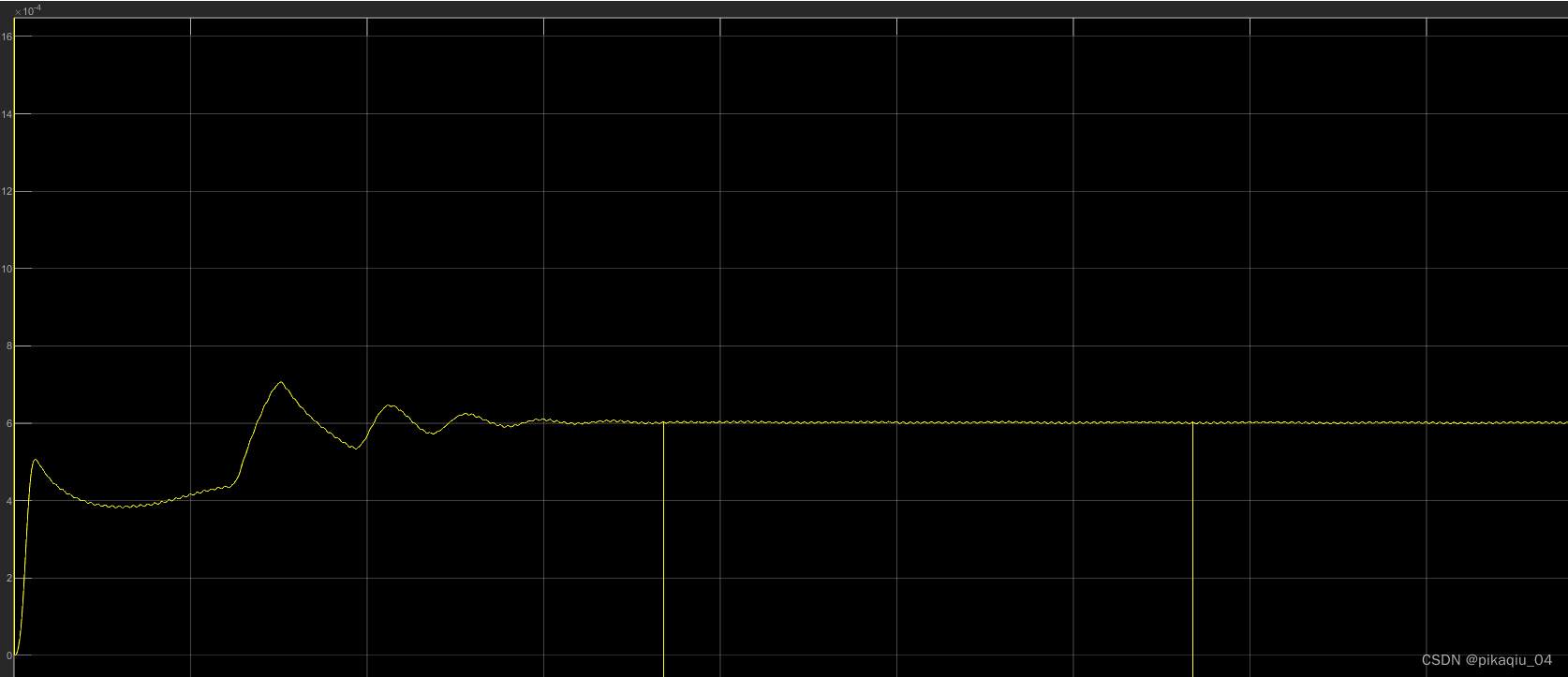
可见SMO估计效果还是很不错的。
SMO接入反馈后的对比
整体框架图
转速误差与前面的基本一致:
位置误差:
总结
基于SMO-PLL的无感电机控制,整体效果还是非常不错的,PID参数还能再改改。对于最难的启动环节,SMO估计以及控制响应也还是很不错的。
补充
仿真最后可不用再加补偿,速度曲线颤动较大时在PLL最后的we前加滤波器。
IPMSM与SPMSM效果均相同,重点在于调参(部分参数高度依赖有感FOC参数)。
此外,传统SMO控制PMSM还有很大的优化空间。
类似仿真的链接: SPMSM-SMO-PLL.tar
都看到这啦,可以给我免费的赞支持一下💕 。万分感谢!
这篇关于基于滑膜观测器锁相环(SMO-PLL)的无传感电机控制simulink仿真的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






