本文主要是介绍基于自适应滑膜观测器的永磁同步电机的无位置传感器控制仿真,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
1、自适应滑模观测器算法
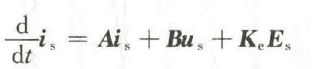
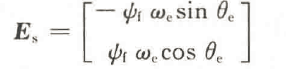
对于表贴式三相PMSM,重写静止坐标系下的电流方程为


为了设计SMO,首先定义滑模面函数为

设计自适应SMO为

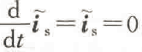
 将两个电流方程相减可得
将两个电流方程相减可得

由于系统进人滑模面后,即有
所以可得到

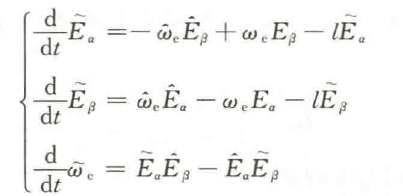
反电动势的自适应律设计为
 为了证明自适应SMO的稳定性,定义李雅普诺夫函数为
为了证明自适应SMO的稳定性,定义李雅普诺夫函数为

由于机械时间常数远大于电气时间常数,所以认为转速在一个估算周期内不变,则由自适应律可得
将上式代入李雅普诺夫式子得
因此,上式满足李雅普诺夫稳定性定理,说明该算法是稳定的。
下图采用基于PLL的自适应SMO控制算法

2、simulink仿真模块搭建

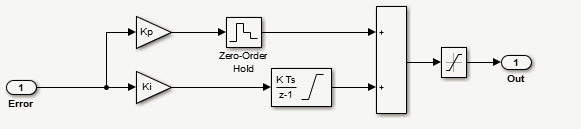
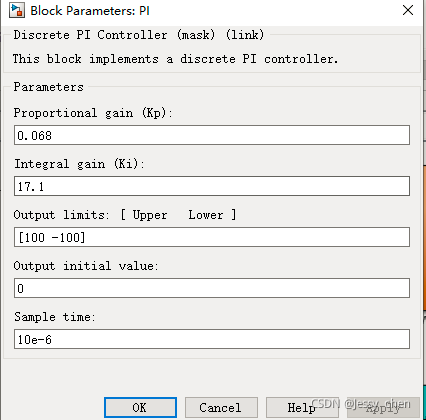
2.1、速度环模块
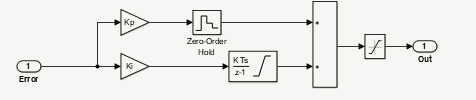
2.2、电流环(Id和Iq)

2.3、永磁同步电机模块



2.4、mod模块

2.5、MRAS模块

 其中,MRAS模块如下
其中,MRAS模块如下
 we模块如下
we模块如下
 其中,L和R的参数数值都在永磁同步电机模块上写出
其中,L和R的参数数值都在永磁同步电机模块上写出
3、仿真结果
3.1实际转子位置与估计转子位置

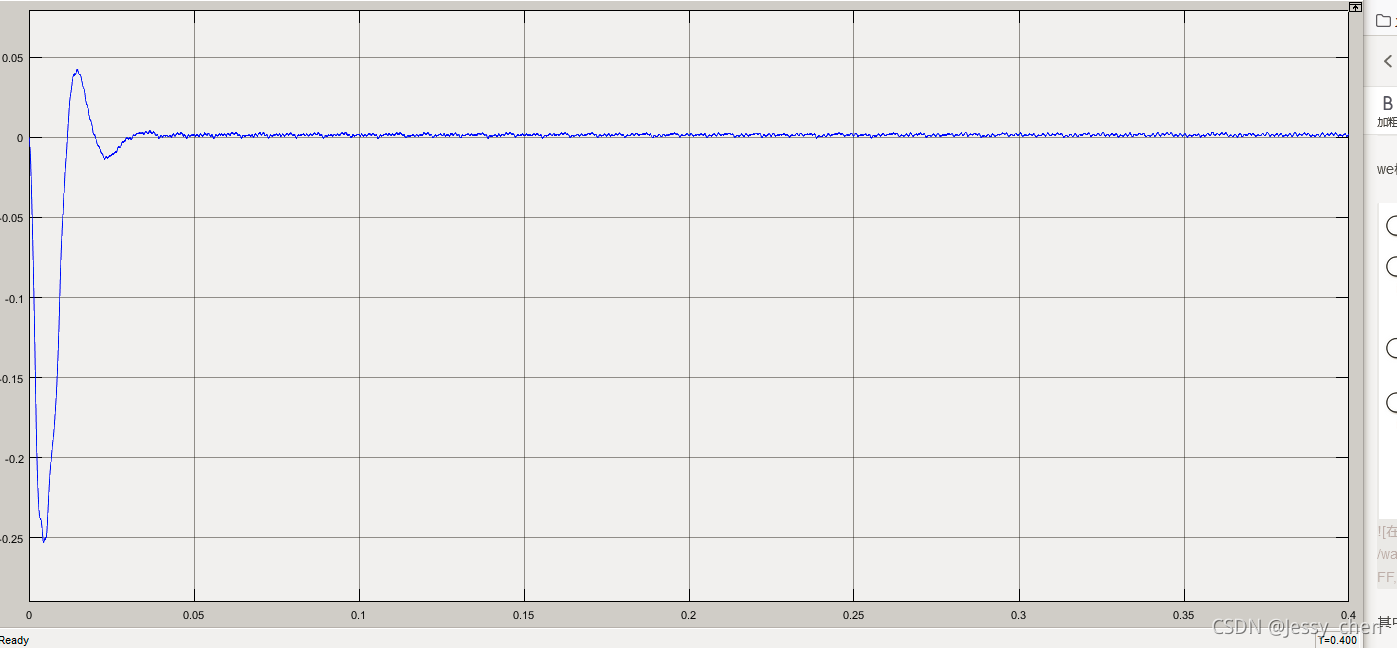
3.2实际转子位置与估计转子位置误差
3.3、实际转速与估计转速

3.4、实际转速与估计转速误差

4、结论
结果还是不是太理想,有望改进。
这篇关于基于自适应滑膜观测器的永磁同步电机的无位置传感器控制仿真的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








