内参专题


相机模型与成像过程:深入解析相机内参、外参及标定方法
相机模型与成像过程:深入解析相机内参、外参及标定方法 引言 相机作为图像采集的重要设备,在图像处理、计算机视觉及机器视觉等领域扮演着核心角色。了解相机的成像原理、模型参数及标定方法,对于提升图像质量和后续处理效果至关重要。本文将详细解析相机模型与成像过程。 相机模型与成像过程 针孔相机模型 针孔相机模型是计算机视觉和摄影中广泛使用的一个基础模型,它模拟了光线通过一个理想化的针孔(即相

【自动驾驶】27.相机畸变_相机内参标定 整理
这篇文章讲解的很详细,包括在哪一步添加畸变:【自动驾驶视觉感知:相机标定】 本文整理了很多有关相机畸变博客的相关内容,都附上的原文地址,也纠正了一些其他博客的错误。 下面两张截图来自高翔博士的《视觉SLAM十四讲》书中内容。 有关添加畸变矫正以及去畸变的详细过程,可以参考 自动驾驶视觉感知:相机标定。 关于相机内参标定的请参考这篇博客:最详细、最完整的相机标定讲解。 注意,这篇博客

D435相机内参标定(无法直接应用在相机上)
打开roscore和相机 输入 rostopic echo /camera/color/camera_info 从而得到相机的内参 cameraInfo包含D、K、R、P四个矩阵。 矩阵D是失真系数,包括(k1, k2, t1, t2, k3) 矩阵K是相机内参,即 矩阵R是一个3✖3的旋转矩阵,仅对双目相机有效,使左右极线平行。 矩阵P是投影矩阵,即,
VMware虚拟机中ubuntu使用记录(6)—— 如何标定单目相机的内参(张正友标定法)
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 文章目录 前言一、张正友相机标定法1. 工具的准备2. 标定的步骤(1) 启动相机(2) 启动标定程序(3) 标定过程的操作(5)可能的报错 3. 标定文件内容解析 前言 张正友相机标定法是一种通过测量相机拍摄棋盘格上的特征点来计算相机内参和畸变参数的方法。这种标定方法简单易行,能够帮助恢复真实世界中

相机内参和相机外参和标定
在单目视觉系统中,最重要的参数之一是相机的内参坐标,它反映了环境信息到图像信息之间的映射关系,一个精确的内参系数是通过单目相机对观景进行观测和测量的首要保证,相机内参系统与相机感光片位置,镜头位置等有关系,虽然在制作相机时可以生产指定标准的元器件并按照指定的尺寸装配摄像头,通过这些标准可以计算出摄像头的内参,但不幸的是,由于工艺水平有限,元器件尺寸与标准值存在误差,同时装配位置也会与期望值存在偏差

基于ros的相机内参标定过程
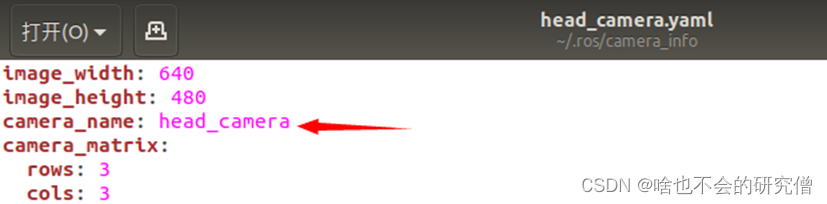
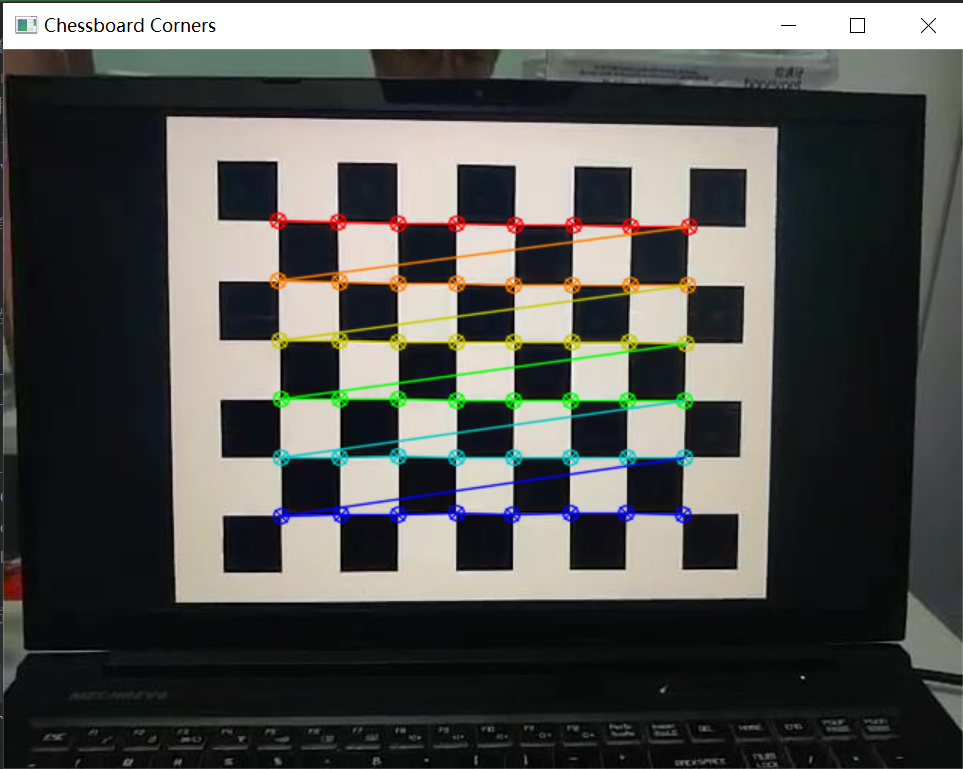
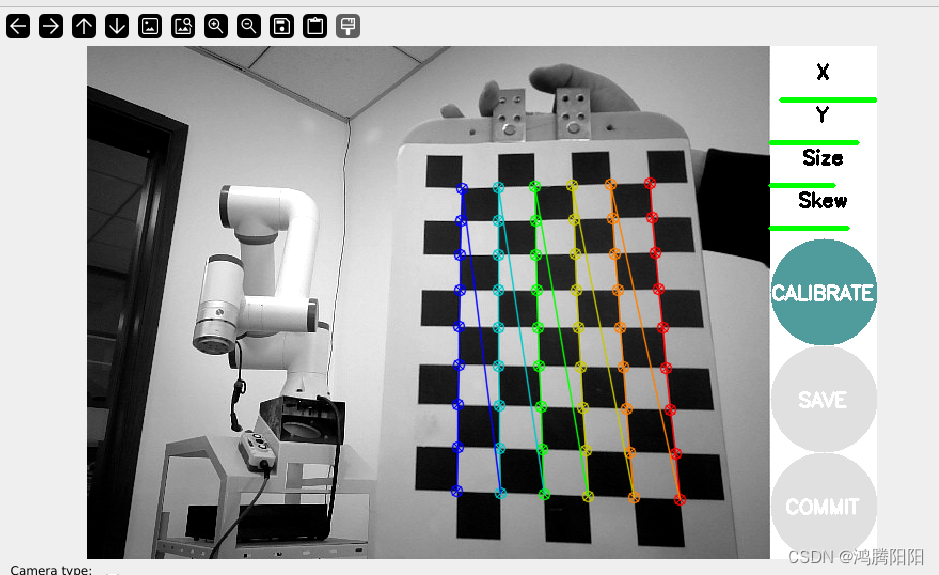
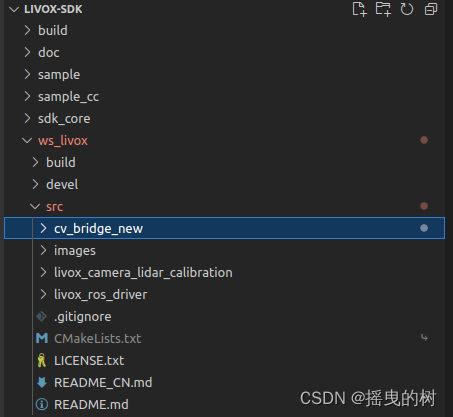
基于ros的相机内参标定过程 1. 安装还对应相机的驱动2. 启动相机节点发布主题3. 下载camera_calibartion4. 将红框的文件夹复制在自己的工作空间里边,编译5. 标定完成以后,生成内参参数文件camera.yaml。将文件放在对应的路径下,修改config文件中标定参数的默认路径。在下次打开相机节点的时候就会加载;6. 生成标定棋盘的网址,可以设置方格数和方格大小7.

鱼眼相机(畸变)内参标定方法及代码实例
概述 鱼眼镜头指视角接近或等于180°的镜头,视角为众多镜头之冠。这类镜头一般焦距极短,在135底片格式下,16毫米或焦距更短的镜头通常即可认为是鱼眼镜头,绝大部分的鱼眼镜头均是定焦镜头,只有少部分是变焦镜头。依成像可分为圆形鱼眼(Circular fisheye,又称全周鱼眼,画面呈圆形)与对角线鱼眼(Diagonal fisheye或Full-frame fisheye,画面呈方形)其镜面似

融合通信系统建设建议(华脉智联内参一)
各行业融合通信系统建设建议 让通信融合信息无阻 题记:目前各个行业都已建设了视频监控系统、内部电话系统、无线对讲机系统、公共广播系统、会场音频系统、视频会议系统等。这些通信系统各自解决不同的用户需求,随着技术的发展,以及融合通信需求的日益增长,越来越多的场景需要实现现有通信系统的融合。 融合通信系统建设是一个系统性的工程,需要基于行业客户的实际需求进行规划设计。包括对已有通信系统的梳

ubuntu下realsence相机通过ros话题直接读取内参
roslaunch realsense2_camera rs_camera.launch //打开相机节点rostopic echo /camera/color/camera_info //查看相机内参 根据官网链接:docs.ros.org/en/melodic/api/sensor_msgs/html/msg/CameraInfo.html D:表示相机的失真系数,其参数分别是(k1,
手机单目相机内参标定
使用软件: 参考我之前的文章: 软件地址:https://github.com/DavidGillsjo/VideoIMUCapture-Android/releases 棋盘标定板下载 链接: https://pan.baidu.com/s/1wiPJsEf87Vc0D7KwJnt3GA?pwd=1234 提取码: 1234 过程 1.使用下载的软件录制一段视频,使用详见我的另一

双目立体视觉---双目标定(内参和外参)
目的:求左右相机内参数矩阵M、畸变系数矩阵D、右摄像头相对于左摄像头的平移向量 T和旋转矩阵R. 步骤: 1. 左右分别单目标定->M、D----焦距,图像中心(fx, fy, cx, cy)畸变系数([k1,k2,p1,p2,k3])和 2.求右摄像头向左摄像头的平移向量 T 和旋转矩阵 R. 原理: 以上参数为 接下来的立体校正使用。 以上各个参数的求解过程就是双目相机的
Ubuntu2204+ROS2(humble)+usb_cam内参标定
1、安装usb_cam包 sudo apt install ros-humble-usb-cam# 测试打开相机ros2 launch usb_cam camera.launch.py# 显示图像ros2 run image_view image_view image:=/camera1/image_raw 2、安装 camera_calibration sudo apt install

相机内参标定和畸变校正以及张氏标定法
一些坐标系 世界坐标系:是一个假想的坐标系,用作一般参考,可根据需要自由定义。 在我们的双目相对位姿测量系统中,世界坐标系一般定义与左相机的摄像机坐标系重合,这样的话左相机的R为单位矩阵,T为零向量。双目视觉中一般将世界坐标系原点定在左相机或者右相机或者二者X轴方向的中点。 相机标定 对于N张无畸变的图像来说,共有4个内参+6N个外参来标定,每张棋盘

行业内参~移动广告行业大盘趋势-2023年12月
前言 2024年,移动广告的钱越来越难赚了。市场竞争激烈到前所未有的程度,小型企业和独立开发者在巨头的阴影下苦苦挣扎。随着广告成本的上升和点击率的下降,许多原本依赖广告收入的创业者和自由职业者开始感受到前所未有的压力。 🎉 行业大盘介绍 数据来源于穿山甲平台发布的【行业内参】,只有平台高等级账号权益才有,为了让更多独立开发者或微小企业也可以了解到大盘的波动情况和周期规律,针对性的做好运营策

Opencv 相机内参标定及使用
目录 一、功能描述 二、标定板制作 三、图像采集 四、标定内参 方法一:Matlab标定 方法二:C++程序标定 五、使用内参 一、功能描述 1.本文用于记录通过 Opencv 进行相机内参标定和对内参的使用来进行图像畸变矫正。 1)相机矩阵:包括焦距(fx,fy),光学中心(Cx,Cy),完全取决于相机本身,是相机的固有属性,只需要计算一次,可用矩阵

摄像机内参矩阵K、基础矩阵F
一.摄像机内参矩阵 摄像机内参矩阵描述的是物体的点与图像点之间的关系。可以将内参矩阵K表示为3*3的矩阵: 内参矩阵K包括5个未知参数。一般情况下,摄像机倾斜因子s=0。因此K就只有4个未知参数了,表示焦距在图像坐标系u轴方向的位置,表示焦距在图像坐标系v轴方向的位置,表示光心在图像坐标系u轴方向的位置,表示光心在图像坐标系v轴方向的位置。 二.基础矩阵 基础矩阵是一个3*3矩阵,表示

相机内参标定理论篇------张正友标定法
一、为什么做相机标定? 标定是为了得到相机坐标系下的点和图像像素点的映射关系,为摄影几何、计算机视觉等应用做准备。 二、为什么需要张正友标定法? 张正友标定法使手工标定相机成为可能,使相机标定不再需要精密的设备帮助。但内参标定的精度却需要依赖采集数据的质量。精度不如专业设备的结果,不过在日常科研等对精度要求不是非常高的领域足够满足。 三、为什么张正友使手工标定相机成为可能? 我们先思考一

实际好像只用到了相机内参矩阵和畸变参数?
首先我看pnp的函数输入是相机内参矩阵和畸变参数 https://blog.csdn.net/sinat_16643223/article/details/115197899 ROS标定出来的结果实际上也是内参矩阵和畸变参数 https://blog.csdn.net/sinat_16643223/article/details/115224938 视觉SLAM讲

标定之相机的内参和外参
我理解错了,相机内参矩阵和相机畸变参数是两个东西,而且好像实际pnp好像没有用到相机的外参矩阵。 内参我觉得主要就是指畸变参数。畸变又分为径向和切向畸变。畸变应该是比较好理解的对吧。 https://blog.csdn.net/sunboyiris/article/details/78082699 https://blog.csdn.net/sinat_16643223/article/

相机内参标定及去畸变矫正代码示例
一、相机标定 由于廉价的相机会给图像带来极大的失真,主要是径向变形和切向变形,导致直线变的弯曲,离图像中心越远的像素,失真越严重。 为了得到正确的图像,首先需要纠正这些失真。为了找到所有这些参数,我们要做的是提供一些定义良好的图案的示例图像(棋盘格)。我们在其中找到一些特定点(棋盘上的格子的角点)。我们知道它在现实空间中的坐标,也知道它在图像中的坐标。利用这些数据,可以在后台通过解决一些数学问
连罗永浩都想入场的电商直播,到底有什么奥秘【黑盒研究内参第9期】
3月19日,罗永浩在微博上称:“起初我认为它是零和游戏,不创造新的价值。但看了招商证券那份著名的调研报告之后,我决定做电商直播了。” 这条消息迅速成为热搜,大家都想知道罗永浩到底会直播卖什么?但作为研究人员,我更加好奇罗永浩看出了直播电商什么价值。 带着这个疑问,我也翻了翻招商证券那份《直播电商三国杀,从“猫拼狗“到“猫快抖“》报告。看完这份报告,我基本清楚了罗永浩所说的价值。 如果你想看
【Ubuntu18.04】激光雷达与相机联合标定(Livox+HIKROBOT)(一)相机内参标定
Livox+HIKROBOT联合标定——相机内参标定 引言1 海康机器人HIKROBOT SDK二次开发并封装ROS1.1 介绍1.2 安装MVS SDK1.3 封装ROS packge 2 览沃Livox SDK二次开发并封装ROS3 相机雷达联合标定——相机内参标定3.1 环境配置3.1.1 安装依赖——PCL 安装3.1.2 安装依赖——Eigen 安装3.1.3 安装依赖——Cere
核心内参:S参数的三个重要特性——因果性、无源性与互异性
1 从一个报错开始 S参数在射频、高速领域的应用非常广泛,相关知识点也非常多。最近浏览了一本2020年新出版的书《S Parameter for Signal Integrity》,作者是IEEE Fellow、业界大牛Peter J. Pupalaikis,现任职于Teledyne LeCroy。该书写的非常棒,从理论分析到Python代码,书中分享了很多干货,当然该书读起来也很复杂需要仔细

美国《商业内参》杂志:2011年全球最佳商学院排行榜
全球最佳商学院是哪个学校?《商业周刊》和《经济学人》说是芝加哥大学,《美国新闻和世界报导》(US News and World Report)说是斯坦福大学。不幸的是,他们都错了。我们此前做了调查研究并得出了全球商学院50强排行榜,其中哈佛大学位居榜首。 其他出版物在评选商学院排行榜时,他们主要分析班级规模、教研设施和教授声誉等因素。然而在评估商学院价值时,唯一真正关键的因素是:商学院在多大

科研上云内参:东南大学探索宇宙反物质
AMS计划 人类首次在太空中使用粒子物理精密探测仪器和技术的实验 阿尔法磁谱仪计划(Alpha Magnetic Spectrometer-AMS),是由1976年诺贝尔奖获奖者、著名美籍华裔物理学家、美国麻省理工学院丁肇中教授领导的,由全球包括美国、中国、俄罗斯、意大利、瑞士、德国等16个国家和地区的56个研究机构、1500多名科研人员参与合作承担的国际性大型科研项目,造价约7亿美元