本文主要是介绍实际好像只用到了相机内参矩阵和畸变参数?,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
首先我看pnp的函数输入是相机内参矩阵和畸变参数
https://blog.csdn.net/sinat_16643223/article/details/115197899

ROS标定出来的结果实际上也是内参矩阵和畸变参数
https://blog.csdn.net/sinat_16643223/article/details/115224938

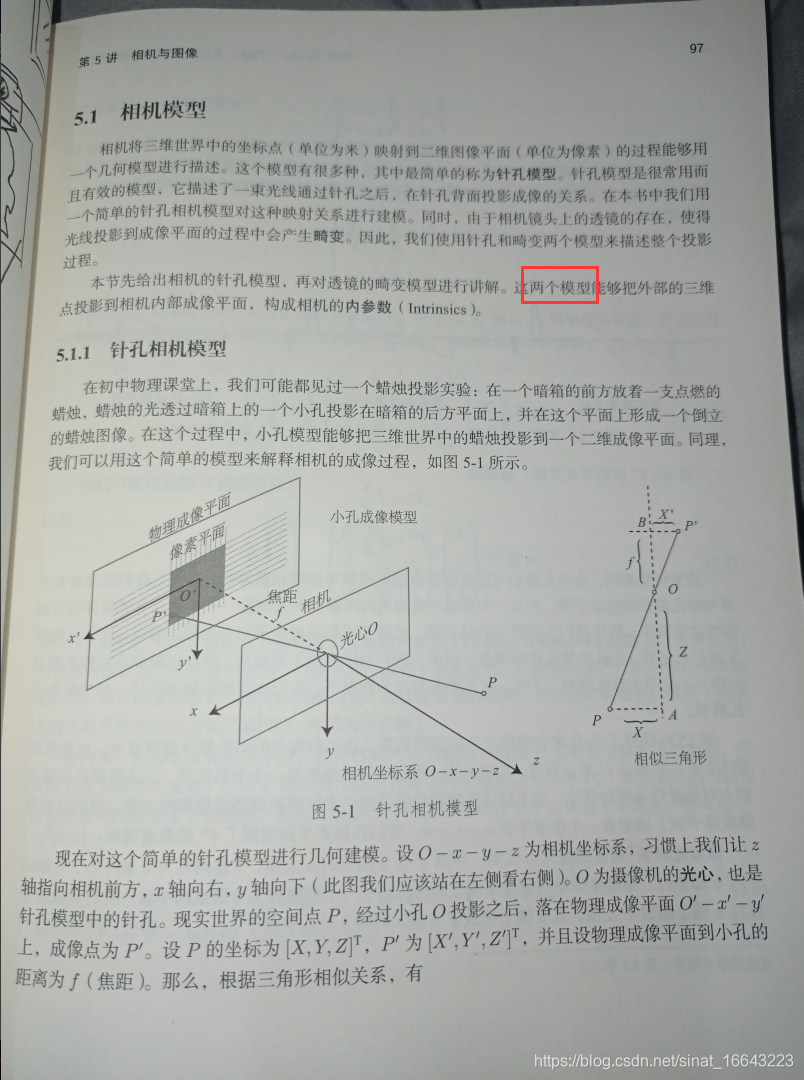
视觉SLAM讲相机标定的时候也是讲相机的内参矩阵和标定参数。

这篇关于实际好像只用到了相机内参矩阵和畸变参数?的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




