相机专题

基于UE5和ROS2的激光雷达+深度RGBD相机小车的仿真指南(五):Blender锥桶建模
前言 本系列教程旨在使用UE5配置一个具备激光雷达+深度摄像机的仿真小车,并使用通过跨平台的方式进行ROS2和UE5仿真的通讯,达到小车自主导航的目的。本教程默认有ROS2导航及其gazebo仿真相关方面基础,Nav2相关的学习教程可以参考本人的其他博客Nav2代价地图实现和原理–Nav2源码解读之CostMap2D(上)-CSDN博客往期教程: 第一期:基于UE5和ROS2的激光雷达+深度RG

海鸥相机存储卡格式化如何恢复数据
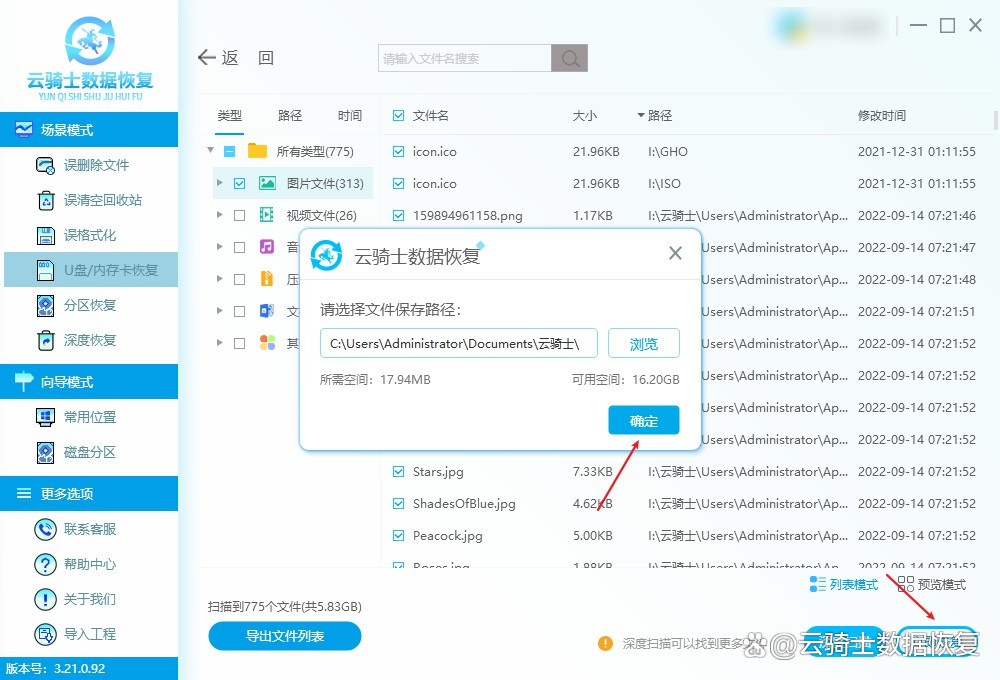
在摄影的世界里,每一张照片都承载着独特的记忆与故事。然而,当我们不慎将海鸥相机的存储卡格式化后,那些珍贵的瞬间似乎瞬间消逝,让人心急如焚。但请不要绝望,数据恢复并非遥不可及。本文将详细介绍在海鸥相机存储卡格式化后,如何高效地恢复丢失的数据,帮助您重新找回那些宝贵的记忆。 图片来源于网络,如有侵权请告知 一、回忆备份情况 海鸥相机存储卡格式化如何恢复数据?在意

机器视觉硬件选型根据某项目相机镜头
一 项目总需求 1、大视野检测需求: (1)大视野: ①产品尺寸15.6寸屏幕,产品大小:350mm x 225mm; ②产品料盘尺寸大小:565mm x 425mm; ③工作距离:880mm;检测精度:500μm; 1、大视野检测需求: (1)大视野: ①产品尺寸15.6寸屏幕,产品大小:350mm x 225mm; ②产品料盘尺寸大小:565mm x 425mm; 工作距离:

005:VTK世界坐标系中的相机和物体
VTK医学图像处理---世界坐标系中的相机和物体 左侧是成像结果 右侧是世界坐标系中的相机与被观察物体 目录 VTK医学图像处理---世界坐标系中的相机和物体 简介 1 在三维空间中添加坐标系 2 世界坐标系中的相机 3 世界坐标系中vtkImageData的参数 总结:

独立双端App《瓦格相机》的开发过程分享
前言 Hello大家好,我是灯灯,独立开发者灯灯,也是天天学藏语的灯灯,哈哈哈... 好了屁话少说,今天和大家分享一下最近自己独立制作一款应用的经验历程,希望能对刚刚起步的新手们、还有独立开发者们有所帮助。 什么样的应用 我想做的是一款能够将照片转换成文字拼成的图片应用,也就是,图片中的每一个像素点都将会被文字取代,同时对应色彩、密集程度等。 之所以想做这样的应用是因为早在我高中的时候,

相机拍摄时最重要的三个参数——光圈、快门、ISO
如果你对相机只有很少了解,那么看这篇文章再好不过啦,我结合很多资料,力图用最通俗易懂的方式进行讲解。 相机拍摄时最重要的3个参数就是——光圈、快门、ISO 次重要的参数有——焦距、景深、曝光 在介绍光圈、快门、ISO之前,必须先介绍曝光。曝光准确的照片: 过曝的照片: 欠曝的照片: 我们把一张完美曝光的照片理解成一桶刚刚装满的水,不

猫猫学iOS之二维码学习,快速打开相机读取二维码
猫猫分享,必须精品 原创文章,欢迎转载。转载请注明:翟乃玉的博客 地址:http://blog.csdn.net/u013357243 上一篇文章写了怎么生成二维码,这儿就说说怎么读取吧,反正也很简单,iOS封装的太强大了 步骤呢就是这样: 读取二维码需要导入AVFoundation框架#import <AVFoundation/AVFoundation.h> 1:利用摄像头识别二维码

sM4040B科学级显微制冷相机特性
sM4040B科学级显微制冷相机特性 sM4040B搭载了 GSENSE4040BSI 3.2 英寸图像传感器,针对传感器固有的热噪声,专门设计了高效制冷模块,使得相机传感器的工作温度比环境温度低达 35-40 度。针对制冷相机常见的低温结雾现象设计了防结雾机制,确保传感器和滤光片表面在低温情况下不会结雾。sM4040B的视频与图像数据通过 USB3 或CameraLink 超高速传输接口传

blender中获取虚拟相机渲染图片上每像素对应的纹理上的像素值
示例图: 相机渲染出图后,图片上每个像素点中对应的纹理的像素值。获取这个对应关系存到数据库 基本思路是 从相机圆心发射射线接触到物体时获取接触点(三维坐标)所在三角面,通过这个三角面的三个顶点坐标及其三个纹理坐标,通过重心坐标求出接触点所对应的纹理坐标。在发射射线时,通过相机分辨率中某一点的二维坐标(即渲染出图后图片上的坐标)转三维坐标,结合相机圆心确认射线方向。至此【图片上每个像素点中

9 自研rgbd相机基于rk3566之qt框架开发tof图像处理线程
qt框架开发tof图像处理线程 tof线程功能及处理流程1 tof线程分为如下几个功能:2 tof线程的处理流程如下: tof线程qt程序详解1 接收界面启动停止信号。2 qt线程运行 tof线程程序示例1 线程头文件:pthread_tof.h2 线程源文件:pthread_tof.cpp tof线程功能及处理流程 1 tof线程分为如下几个功能: 1 v4l2采图部分,将
9 自研rgbd相机基于rk3566之qt框架开发rgb图像处理线程
qt框架开发rgb图像处理线程 rgb线程功能及处理流程1 rgb线程分为如下几个功能:2 rgb线程的处理流程如下: rgb线程qt程序详解1 接收界面启动停止信号。2 qt线程运行 rgb线程程序示例1 线程头文件:pthread_33d_sc2310.h2 线程源文件:pthread_33d_sc2310.cpp rgb线程功能及处理流程 1 rgb线程分为如下几个功能:
Manim的相机功能和动画方式的总结
1. 相机功能 Manim中的相机功能允许用户控制场景的视角、缩放和背景等。相机的主要类是Camera,而Scene类则包含了对相机的封装。 1.1 相机类型 标准相机:用于2D场景的基本相机。3D相机:用于3D场景的相机,提供了更复杂的视角控制。 1.2 相机属性 背景颜色:可以设置相机的背景颜色。 self.camera.background_color = "#FFFFFF" #

XR-Frame 实现 始终朝向屏幕(相机)的面片与模型
wxml,xr-frame中plane平面默认是趴在场景中的,需要先绕x轴渲染90度, // 面片 <xr-node id="l" position="-3.0 0 0.0"><xr-mesh rotation="90 0 0" geometry="plane" uniforms="u_baseColorFactor:0.2 0.2 0.4 1, u_metallicRoughnes
8 自研rgbd相机基于rk3566之sensor图像解析与AWB算法原理
自研rgbd相机基于rk3566之sensor图像解析与AWB开发 1、sensor-raw图解析介绍2、sensor-raw图解析程序详解常规raw10-to-raw16数据解析sc2310-raw10-to-raw16图像解析gc2053/gc2093 raw图像解析 3、sensor-awb及常用算法程序bayer bggr to rgb 图像解析简单白平衡算法灰度世界法白平衡算法完美

6 自研rgbd相机基于rk3566之深度计算库移植及测试
自研rgbd相机基于rk3566之深度相机计算库移植及测试 tof深度计算库移植1 移植步骤2 .so 动态库交叉编译3 动态链接库的测试 测试程序库调用头文件 w_33d_depth.h调用源文件 w_33d_depth.c tof深度计算库移植 1 移植步骤 深度计算库包括深度图像解析,读入eeprom标定参数进行深度矫正与深度还原,原始深度数据输出。 需要将深度库从win
6 自研rgbd相机基于rk3566之深度计算库程序详解
自研rgbd相机基于rk3566之深度计算库详解 1 tof深度计算库框架读入深度图像参数配置tof模组标定参数读入及解析深度计算函数接口 2 tof深度计算库程序详解深度计算程序头文件深度计算程序 源文件 1 tof深度计算库框架 读入深度图像参数配置 支持raw8/raw10/raw16 格式 /**************************RAW8 1280*
7 自研rk3566/rk3588+rgbd相机之单目双目相机标定库开发与移植
自研rk3566/rk3588+rgbd相机之单目双目相机标定库开发与移植 1、单目双目标定介绍2、单目双目标定测试程序自动棋盘角点棋盘格检测算法 auto_cam.h自动棋盘角点棋盘格检测算法 auto_cam.cpp 3、单目双目标定程序移植makefile测试程序接口 4、测试图像 1、单目双目标定介绍 RGBD相机进行图像与点云融合前需要进行单目相机和双目相机的标定。单目

HarmonyOS NEXT实战:“相机分段式拍照”性能提升实践
概述 相机拍照性能依赖算法处理的速度,而处理效果依赖算法的复杂度,算法复杂度越高的情况下会导致处理时间就越长。目前系统相机开发有两种相机拍照方案,分别是相机分段式拍照和相机单段式拍照: 分段式拍照是系统相机开发的重要功能之一,即相机拍照可输出低质量图用作缩略图,提升用户感知拍照速度,同时使用高质量图保证最后的成图质量达到系统相机的水平,构筑相机性能竞争力。这样可以优化系统的拍照响应时延,从而提

宾得相机sd卡格式化了怎么办?分享应对之策
对于摄影爱好者而言,相机不仅是捕捉美好瞬间的设备,更是珍藏回忆的宝库。然而,在使用宾得相机的过程中,可能会遇到SD卡意外格式化的情况,这无疑给许多摄影爱好者带来了不小的困扰。SD卡格式化后,操作系统将无法直接访问其中的文件,但幸运的是,这些数据在物理层面上可能并未被完全清除。本文将详细介绍当宾得相机SD卡被格式化后,我们应采取的应对之策,希望帮助大家尽可能恢复宝贵的照片和

【HarmonyOS】模仿个人中心头像图片,调用系统相机拍照,从系统相册选择图片和圆形裁剪显示 (二)
【HarmonyOS】模仿个人中心头像图片,调用系统相机拍照,从系统相册选择图片和圆形裁剪显示 (二) Demo效果展示: 方案思路: 1.修改调用相机的方式,使用cameraKit进行相机的调用,拍照后返回图片url进行处理。 2.裁剪View,使用画布进行取景框的效果展示 手势拖动和放大缩小图片,裁剪计算在第三章进行讲解。 Demo示例代码: UI主界面 import {
基于 XILINX FPGA 的 Cameralink Full 模式相机采集系统技术实施方案研究报告
《基于 XILINX FPGA 的 Cameralink Full 模式相机采集系统技术实施方案研究报告》 **摘要:** 本研究报告详细阐述了基于 FPGA 芯片 XILINX 开发的 Cameralink full 模式相机采集系统的技术实施方案。该系统具有高分辨率、高帧频、强大的图像目标识别和质心算法等功能,可通过 PCle 接口上传到 PC 端上位机,并能在 HDMI 显示器上显示画
基于 XILINX FPGA 的 Cameralink Full 模式相机采集系统技术分析方案
《基于 XILINX FPGA 的 Cameralink Full 模式相机采集系统技术分析方案》 **一、引言** 随着科技的不断发展,对图像采集和处理的要求越来越高。基于 XILINX FPGA 的 Cameralink Full 模式相机采集系统以其强大的功能和高性能,为众多领域提供了高效的图像采集和处理解决方案。本技术分析方案将对该系统的技术特点、应用领域以及优势进行深入分析。 **
使用QT开发一些特殊相机的思路:个人经验
前言: 去年使用QT开发过Dalsa线扫相机的应用程序,去获取数据,显示图片,实时分析等,测试demo的链接如下: Dalsa线扫相机-二次开发-QT-C++ 可用Demo(一)_dalsa开发-CSDN博客 前段时间,同时需要开发BitFlow相机的软件,他搞了一段时间没搞出来,请我帮忙看看,花了一个多小时一起看SDK资料,分析出了设计思路,

Android学习之调用系统相机拍照、截图并保存
最近写一款拍照的APP用到了拍照,截图,并返回ImageView。网上找了好几种fang法,发现最好还是调用系统自带的,既简单又方便。 启用android 系统相机 intent =new Intent(MediaStore.ACTION_IMAGE_CAPTURE); 启用android截图 intent = new Intent("com.android.camera.action