畸变专题
Ansys Speos | 挡风玻璃光学畸变分析
附件下载 联系工作人员获取附件 此示例介绍了基于 TL 957 标准和43号法规(ECE R43)的挡风玻璃光学畸变分析的工作流程,以及 GitHub Ansys 光学自动化中提供的分析自动化工具。 如果您从未使用过任何 GitHub 仓库,可以根据光学自动化库的介绍进行操作,该文章在运行以下的工作流程之前可以提供一些必备知识。 该工作流程使用了于 2023R1 发布的light expe
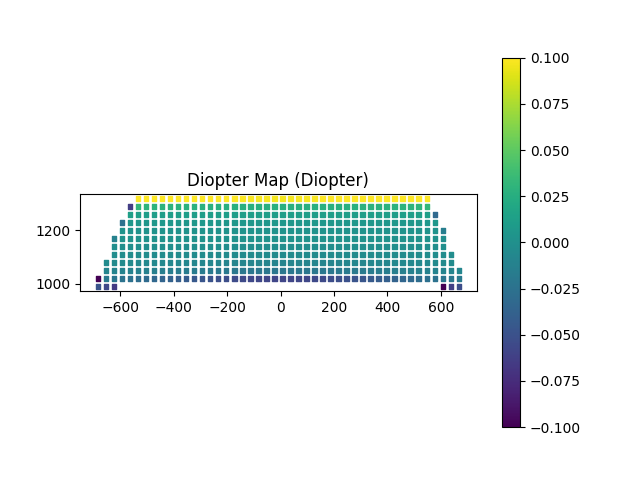
[C#]使用深度学习算法opencvsharp部署RecRecNet广角图像畸变矫正校正摄像广角镜头畸变图像
【论文地址】 https://arxiv.org/abs/2301.01661 【训练源码】 https://github.com/KangLiao929/RecRecNet 【参考源码】 https://github.com/hpc203/recrecnet-opencv-dnn 【算法介绍】 广角镜头在VR技术中显示出诱人的应用,但它会在捕获的图像中引入严重的径向失真。为了恢

从普通相机模型到鱼眼畸变模型--标定与去畸变
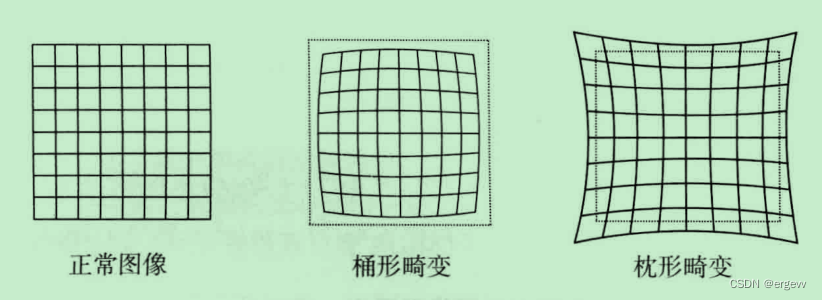
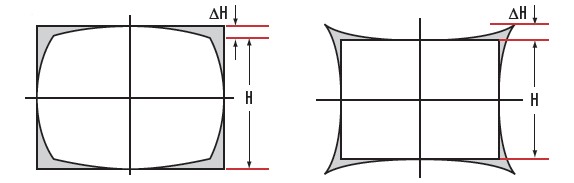
目录 普通相机模型普通成像模型针孔模型与透镜组:径向畸变切向畸变现代手机摄像头的基本组成内参矩阵 畸变模型张氏标定法 鱼眼模型透镜组r和f的进一步说明等距投影模型(OpenCV::fisheye)鱼眼图像去畸变过程 普通相机模型 普通成像模型 普通相机模型一般通过pin-hole model+径向畸变+切向畸变进行建。 针孔模型与透镜组: 针孔模型即小孔成像模型,近代的摄
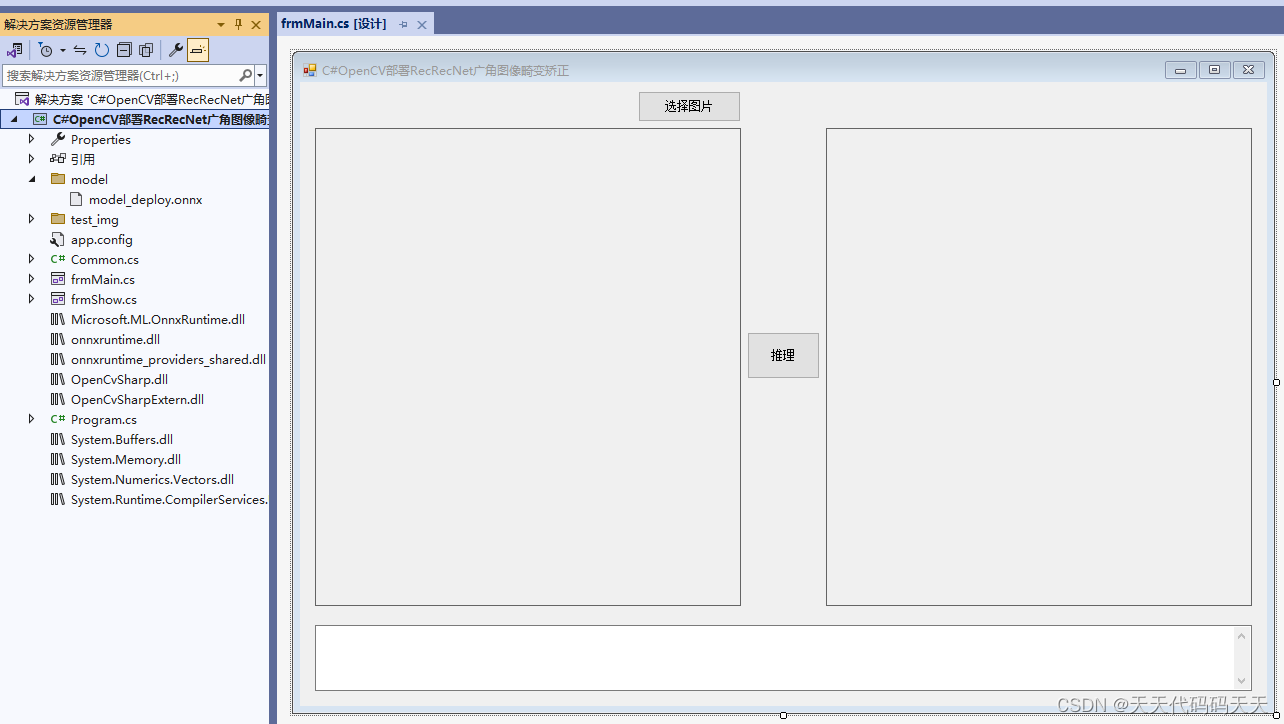
C# OpenCV 部署RecRecNet广角图像畸变矫正
C# OpenCV 部署RecRecNet广角图像畸变矫正 目录 说明 效果 模型信息 项目 代码 下载 说明 ICCV2023 - RecRecNet: Rectangling Rectified Wide-Angle Images by Thin-Plate Spline Model and DoF-based Curriculum Learning 参考: ht

【自动驾驶】27.相机畸变_相机内参标定 整理
这篇文章讲解的很详细,包括在哪一步添加畸变:【自动驾驶视觉感知:相机标定】 本文整理了很多有关相机畸变博客的相关内容,都附上的原文地址,也纠正了一些其他博客的错误。 下面两张截图来自高翔博士的《视觉SLAM十四讲》书中内容。 有关添加畸变矫正以及去畸变的详细过程,可以参考 自动驾驶视觉感知:相机标定。 关于相机内参标定的请参考这篇博客:最详细、最完整的相机标定讲解。 注意,这篇博客

摄像头校准之白平衡畸变坏点
摄像头校准之白平衡&畸变&坏点 1. 源由2. 校准内容3. 畸变校准一、畸变模型二、校准步骤1. 准备工作2. 特征点检测3. 计算内参数和畸变系数4. 畸变校正 三、验证和优化1. 视觉验证2. 误差评估3. 参数优化 4. 白平衡校准一、白平衡基础二、自动白平衡(AWB)三、手动白平衡四、验证和优化 5. 坏点校准一、坏点检测1. 确定坏点类型2. 拍摄黑暗场图像3. 阈值检测 二、

相机标定中一些细节--畸变模型和参数
张正友标定方法做相机标定的主要过程是先估计每张图片的单应性矩阵,然后通过这一系列的单应性矩阵估计出内外参数初值,最后再考虑畸变模型的加入进行非线性优化。同时优化内参、外参和畸变参使得重投影误差最小。 镜头的畸变表现出来的非线性关系,通常使用一些近似的手段来建模逼近它,如下几种常见的镜头畸变模型: Brown-ConradyBrandt-KannalaCMeiDavid Scaramuzza

摄像机畸变模型(opencv)
摄像机畸变模型(opencv) 本人邮箱:sylvester0510@163.com,欢迎交流讨论, 欢迎转载,转载请注明网址http://blog.csdn.net/u010128736/ 理想的摄像机模型是针孔模型,但是实际的镜头不符合这种假设。另外,相机的构造以及制造、安装、工艺等因素也会造成误差,导致相机通常会存在多种非线性畸变,使得上面介绍的针孔相机模型并不能准确地描

【Python图像处理篇】opencv中的去畸变
去畸变 opencv opencv-python光学畸变校准 使用python+opencv进行图像的去畸变 使用python+opencv进行图像的去畸变 关于OpenCV中的去畸变 为什么相机参数每次标定的结果都不一样(原理分析)

车载摄像头畸变校正解决方案,打造无畸变高清视界
在车载摄像头日益普及的今天,摄像头图像的畸变问题成为了制约图像质量提升的一大瓶颈。畸变不仅影响画面的美观度,更关键的是它可能导致智能驾驶系统对环境的误判,进而威胁到行车安全。美摄科技凭借其在图像处理领域的深厚实力,推出了车载摄像头畸变校正解决方案,为车企提供了有效的解决方案。 美摄科技的车载摄像头畸变校正解决方案,直接对摄像头采集的画面进行畸变校正处理,消除四周的画面扭曲。该方案采用了先进的图像

遥感图像处理:从畸变消除到专题信息提取
在遥感技术的应用中,图像处理是不可或缺的关键步骤。从消除各种辐射畸变和几何畸变,到利用增强技术突出景物的光谱和空间特征,再到进一步理解、分析和判别处理后的图像,这一过程为我们呈现了一幅幅更为真实、清晰的景物图像,并提供了丰富的专题信息。遥感图像处理通常分为模拟处理和数字处理两类,其目的在于更好地满足各种应用需求。 消除辐射畸变和几何畸变:还原真实面貌

鱼眼相机(畸变)内参标定方法及代码实例
概述 鱼眼镜头指视角接近或等于180°的镜头,视角为众多镜头之冠。这类镜头一般焦距极短,在135底片格式下,16毫米或焦距更短的镜头通常即可认为是鱼眼镜头,绝大部分的鱼眼镜头均是定焦镜头,只有少部分是变焦镜头。依成像可分为圆形鱼眼(Circular fisheye,又称全周鱼眼,画面呈圆形)与对角线鱼眼(Diagonal fisheye或Full-frame fisheye,画面呈方形)其镜面似

TDengine 在水电厂畸变波形分析及故障预判系统中的应用
作者:深圳双合电机监测和故障预测产品研发团队 小 T 导读:深圳双合电气股份有限公司成立于 1993 年,是国家级高新技术企业和广东省专精特新企业。公司致力于电力及工企业系统应用解决方案及相关智能监测设备的研究、开发、生产与实施,拥有面向电力系统、发电、石化、冶金、钢铁等行业的故障诊断及预警系统系列解决方案。 https://github.com/taosdata/TDengine

计算机设计大赛 题目:基于机器视觉的图像矫正 (以车牌识别为例) - 图像畸变校正
文章目录 0 简介1 思路简介1.1 车牌定位1.2 畸变校正 2 代码实现2.1 车牌定位2.1.1 通过颜色特征选定可疑区域2.1.2 寻找车牌外围轮廓2.1.3 车牌区域定位 2.2 畸变校正2.2.1 畸变后车牌顶点定位2.2.2 校正 7 最后 0 简介 🔥 优质竞赛项目系列,今天要分享的是 基于机器视觉的图像矫正 (以车牌识别为例) 该项目较为新颖,适合作为竞
SLAM面试代码题:点云去畸变
题目 假设已知一帧点云每个点的时间戳和它的位姿,要求对点云去畸变 解题思路 定义一个点云的struct利用时间戳,把一帧内每个时刻的点云都变换到这一帧的起始时间处位置使用线性插值,旋转使用球面非线性插值 // 点云去畸变#include <iostream>#include <Eigen/Core>#include <Eigen/Geometry>#include</

OpenCV开发笔记(七十五):相机标定矫正中使用remap重映射进行畸变矫正
若该文为原创文章,转载请注明原文出处 本文章博客地址:https://blog.csdn.net/qq21497936/article/details/136293833 各位读者,知识无穷而人力有穷,要么改需求,要么找专业人士,要么自己研究 红胖子(红模仿)的博文大全:开发技术集合(包含Qt实用技术、树莓派、三维、OpenCV、OpenGL、ffmpeg、OSG、单片机、软硬结合等等)持续更新中

人工智能 — 相机模型和镜头畸变
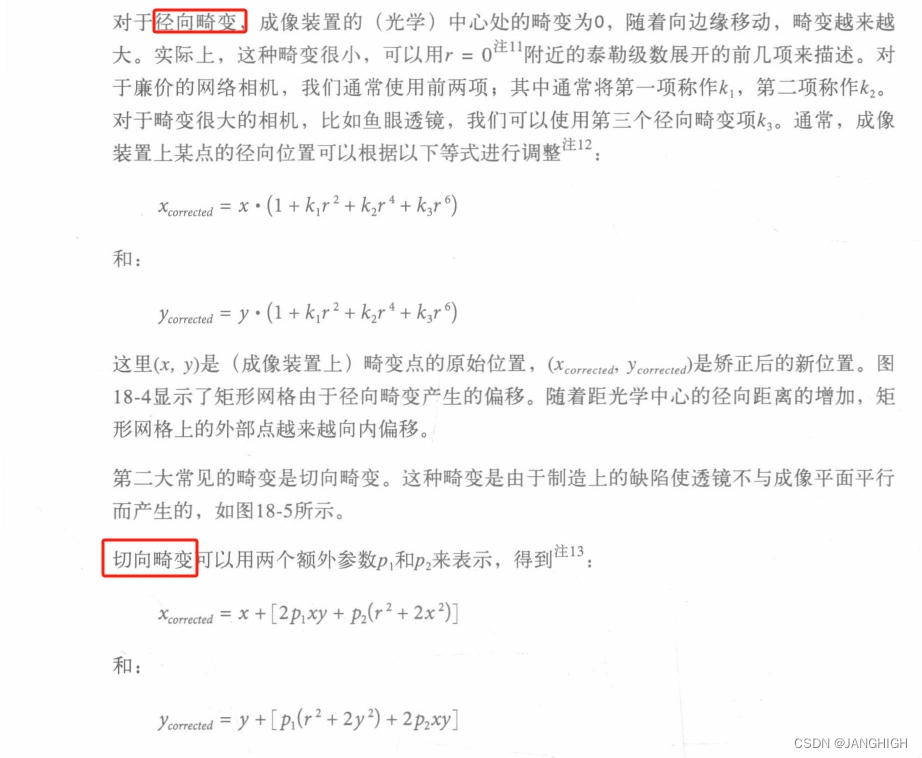
目录 一、相机模型1、相机与图像2、坐标系1、世界坐标系2、相机坐标系3、图像物理坐标系4、图像像素坐标系 3、相机成像4、世界坐标系到摄像机坐标系5、欧氏变换6、齐次坐标7、摄像机坐标系到图像物理坐标系8、图像物理坐标系到图像像素坐标系9、摄像机坐标系到图像像素坐标系10、世界坐标系到图像像素坐标系11、相机成像原理 二、镜头畸变1、镜头畸变2、径向畸变3、径向畸变4、切向畸变5、畸变矫正
matlab去图像畸变
Input_path = ‘C:\Users\Dell\Desktop\毕业设计\去畸变\Image\1’; Output_path=‘C:\Users\Dell\Desktop\毕业设计\去畸变\Image\2’; namelist = dir(strcat(Input_path,‘*.jpg’)); %获得文件夹下所有的 .jpg图片 len = length(namelist); for

Halcon+MFC实现相机畸变校正
相关源码下载:https://download.csdn.net/download/Stone_Wang_MZ/15008731 理论原理 提供标定板信息,获取到不同视角的标定板图片后,生成畸变系数。 模块使用事项 在Demo中找到CCaliDistort.dll,该dll函数接口如图: DlgShowEx:打开对话框设置修改参数后获取畸变参数。 GetImageEx:输入图像后通过获

Camera基础原理与畸变补偿
Camera基础原理与畸变补偿 Camera知识大盘点 Camera的构成看起来并不复杂,核心是镜头+感光芯片,以及其它辅助部件。但大家也都知道光学成像是一门非常深奥且尖端的科学,这其中消费者可以拿来讨论的话题非常之多。现在就来谈谈摄像头,从camera的成像原理开始 一、成像原理—Camera 景物通过镜头(LENS)生成的光学图像投射到图像传感器(Sensor)表面上,然后转为

4.相机标定——张氏标定原理(无畸变)
4.相机标定——张氏标定原理(无畸变) 1.相机标定:坐标系转换学习 2.相机的畸变介绍 3.相机标定原理(不考虑径向畸变) A Flexible New Technique for Camera Calibration 张氏标定论文原文 在第一篇博客中已经对坐标系转换做了详细介绍。在张氏标定原理中便不再介绍,直接使用其结论。请配合论文原文进行食用。 4.1坐标系转换回顾 [ P

相机内参标定和畸变校正以及张氏标定法
一些坐标系 世界坐标系:是一个假想的坐标系,用作一般参考,可根据需要自由定义。 在我们的双目相对位姿测量系统中,世界坐标系一般定义与左相机的摄像机坐标系重合,这样的话左相机的R为单位矩阵,T为零向量。双目视觉中一般将世界坐标系原点定在左相机或者右相机或者二者X轴方向的中点。 相机标定 对于N张无畸变的图像来说,共有4个内参+6N个外参来标定,每张棋盘