本文主要是介绍相机内参标定和畸变校正以及张氏标定法,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
一些坐标系
世界坐标系:是一个假想的坐标系,用作一般参考,可根据需要自由定义。
在我们的双目相对位姿测量系统中,世界坐标系一般定义与左相机的摄像机坐标系重合,这样的话左相机的R为单位矩阵,T为零向量。双目视觉中一般将世界坐标系原点定在左相机或者右相机或者二者X轴方向的中点。
相机标定
对于N张无畸变的图像来说,共有4个内参+6N个外参来标定,每张棋盘图上有4个有效的角点,可以提供8个约束,则需要8N>=4+6N8N>=4+6N8N>=4+6N,则至少需要2张无畸变的图像可以求出相机的内参和外参,实际上一般可以取10张,从而利用最小二乘得到更精确的解。在求出了内参和外参后,即可根据剩余的点坐标求出畸变相关参数。
图像坐标和像素坐标
主要是定义的原点不同,图像坐标u,v原点在图像中心即光心,像素坐标x,y 原点一般在左上角;图像坐标系的单位是mm,属于物理单位,而像素坐标系的单位是pixel。
相机标定参数例子
200万pixels工业摄像机为例:已知摄像头的焦距为4mm,像片的尺寸大小为640x480,传感器尺寸为5856 μm x 3276 μm,像素大小为3μm x 3μm。由上面已知条件可求得内参矩阵 f x , f y fx,fy fx,fy为焦距,一般情况下,二者相等,u0、v0为主点坐标(相对于成像平面),beta为坐标轴倾斜参数,理想情况下为0。

将内参矩阵分解为切变(shear,类似于将长方形压成平行四边形的变形方式)、缩放,平移变换,分别对应轴倾斜、焦距、主点偏移, 右边三个矩阵依次是:2D平移、2D缩放、2D切变。缩放和切变可改变顺序
透镜畸变及校正模型
径向畸变
最常见的畸变,沿着成像镜头半径方向凹凸的坍缩和膨胀,即枕形或桶形。产生原因是光线在原理透镜中心的地方比靠近中心的地方更加弯曲。
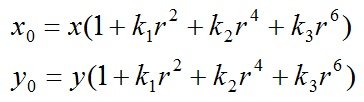
成像仪光轴中心的畸变为0,沿着镜头半径方向向边缘移动,畸变越来越严重。畸变的数学模型可以用主点(principle point)周围的泰勒级数展开式的前几项进行描述,通常使用前两项,即k1和k2,对于畸变很大的镜头,如鱼眼镜头,可以增加使用第三项k3来进行描述,成像仪上某点根据其在径向方向上的分布位置,调节公式为:
切向畸变
切向畸变是由于透镜本身与相机传感器平面(成像平面)或图像平面不平行而产生的,这种情况多是由于透镜被粘贴到镜头模组上的安装偏差导致。
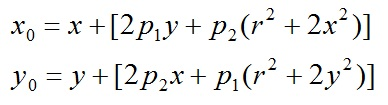
综上,我们一共需要5个畸变参数(k1、k2、k3、p1和p2 )来描述透镜畸变。
张氏标定法
只关注了影响最大的径向畸变(k1,k2),并忽略3阶以上的畸变量。(阶数,即求导次数,不同于数的几次幂数)

注意事项
- Corners中的角点坐标顺序排列规律不一定是以行从左上到右下。
- 如果一部相机的分辨率变为原来的n倍而其他地方不变,那么它的内参也将变为原来的n倍
这篇关于相机内参标定和畸变校正以及张氏标定法的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!









