标定专题

解析apollo纵向控制标定表程序
百度apollo采用标定表描述车辆速度、加速度与油门/刹车之间的关系。该表可使无人车根据当前车速与期望加速度得到合适的油门/刹车开合度。除了文献《Baidu Apollo Auto-Calibration System - An Industry-Level Data-Driven and Learning based Vehicle Longitude Dynamic Calibrating

halcon 的图像坐标转到实际的机械坐标的标定
所谓手眼系统,就是人眼睛看到一个东西的时候要让手去抓取,就需要大脑知道眼睛和手的坐标关系。如果把大脑比作B,把眼睛比作A,把手比作C,如果A和B的关系知道,B和C的关系知道,那么C和A的关系就知道了,也就是手和眼的坐标关系也就知道了。 相机知道的是像素坐标,机械手是空间坐标系,所以手眼标定就是得到像素坐标系和空间机械手坐标系的坐标转化关系。 在实际控制中,相机检测到目标在图像中的像

OpenCV下的无标定校正(stereoRectifyUncalibrated)
OpenCV下的无标定校正(stereoRectifyUncalibrated) 文章目录 1. 杂话2. 无标定校正2.1 先看代码2.2 一点解释2.3 findFundamentalMat参数2.4 stereoRectifyUncalibrated参数 3. 矫正结果 1. 杂话 咱们在之前的帖子里面讲了一些比较常规的标定和校正OpenCV下的单目标定,双目标定与立体

摄像机标定学习笔记(4)
转载自:知乎用户 陈明猷 补充回答题主的问题: 1.为什么要用多张标定板图片做标定? 具体数学实现题主可以自行找文献,这里只说原理。单目标定说白了其实就是解一个矩阵方程,其未知量是内、外参数矩阵。 根据线性代数,把解矩阵方程转化成解方程组的问题,由于一张棋盘格只能提供8条相互独立的方程(具体原因请查阅透视变换原理),所以不足以求出10个未知数。理论上,只需2个棋盘格便足够解出全部参数了,但是m
摄像机标定学习笔记(3)
转自 liulina603 http://blog.csdn.net/liulina603/article/details/52953414 1、相机内参数是与相机自身特性相关的参数,比如相机的焦距、像素大小等; 相机外参数是在世界坐标系中的参数,比如相机的位置、旋转方向等。 相机标定(或摄像机标定): 一句话就是世界坐标到像素坐标的映射,当然这个世界坐标是我们人为去

Azure_Kinect_ROS版编译及IMU参数标定.
Azure_Kinect_ROS版编译 参照官方文档:https://github.com/microsoft/Azure_Kinect_ROS_Driver/blob/melodic/docs/building.md 编译. 如果是ubuntu18.04等通过命令行安装SDK的,应该可以轻松编译成功.但是如果是在16.04上安装的(安装方法参照https://blog.csdn.net/u01
摄像机标定学习笔记(5) 关于张正友平面标定方法
张正友教授于1998年提出了单平面棋盘格的摄像机标定方法,是一种用来标定摄像机的一种灵活的新技术,这种方法只需要相机的很少位置(至少两个)观测平面,并且相机和平面都可以以未知的速度自由移动,这种方法灵活易用,推动了计算机视觉从实验室走向现实世界的关键一步。 1、算法描述 此标定方法简单实用,首先只需要打印一张模板并贴在一个平面上,用摄像机从不同的角度拍摄若干模板的图像,然后检测图

Halcon!!!最新!! 从零认识标定板——制作描述文件和自己的标定板
一.标定板简介 标定板是一种带有固定间距图案阵列的几何模型,主要用于机器视觉、图像测量、摄影测量、三维重建等领域。它的主要功能包括校正镜头畸变、确定物理尺寸和像素间的转换关系,以及确定空间物体表面某点的三维几何位置与其在图像中对应点之间的相互关系。通过相机拍摄标定板并计算校准算法,可以获得高精度的测量和重建结果。标定板的这个过程涉及误差测量与评估以及误差图像的矫正与补偿,通过这些步骤,可以更

7 自研rk3566/rk3588+rgbd相机之单目双目相机标定库开发与移植
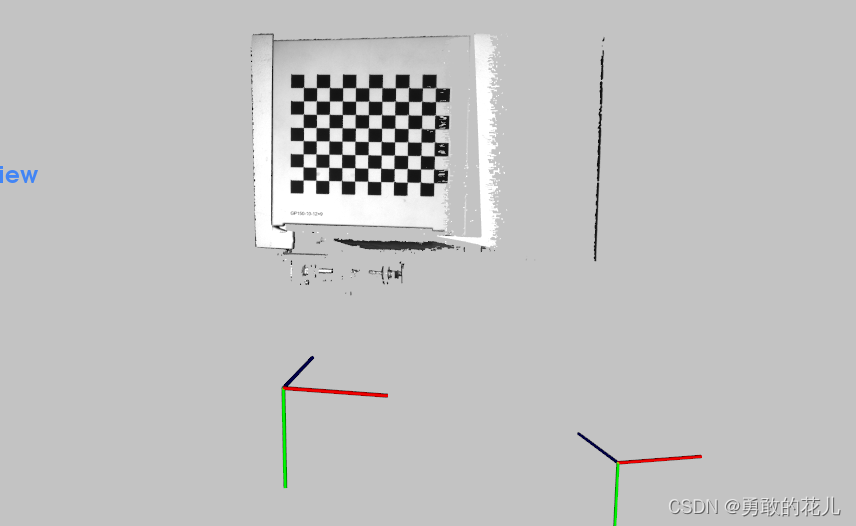
自研rk3566/rk3588+rgbd相机之单目双目相机标定库开发与移植 1、单目双目标定介绍2、单目双目标定测试程序自动棋盘角点棋盘格检测算法 auto_cam.h自动棋盘角点棋盘格检测算法 auto_cam.cpp 3、单目双目标定程序移植makefile测试程序接口 4、测试图像 1、单目双目标定介绍 RGBD相机进行图像与点云融合前需要进行单目相机和双目相机的标定。单目
里程计运动模型及标定
最小二乘: https://blog.csdn.net/u012736279/article/details/41323247 https://blog.csdn.net/u012736279/article/details/46545971 特征提取: https://blog.csdn.net/renshengrumenglibing/article/details/860424

机械臂工具标定方法-6点标定法
在实际使用机械臂时, 我们通常会在机械臂末端装上各种工具去完成特定的任务, 如机械夹爪, 灵巧手等。 我们通过目标识别等手段得到目标的位置后, 是希望工具移动到对应的位置进行操作, 而不是让机械臂末端移动到对应位置。 这个时候就需要对工具进行标定, 以便得到工具在机械臂基座系下的坐标。 如上图所示, 我们希望通过夹爪去操作物体。比如当前已知物体在基坐标系下的坐标为(x,y,z)。 我们通过机

机械臂手眼标定方法详解
0 背景 为了使机械臂更好地完成任务, 通常会搭配摄像头等感知设备。 根据机械臂与摄像头的连接关系, 通常有2种模式, 一种是摄像头安装在机械臂上, 称为眼在手上(eye-on-hand), 另一种是摄像头不在机械臂上, 称为眼在手下(eye-off-hand)。眼在手上这种方式更常用, 因此本文主要讲解这种模式下的手眼标定方法。 1 手眼标定解决什么问题 标定目的是为了统一坐标系。摄像头检

激光雷达的强度标定及路标提取
公众号致力于分享点云处理,SLAM,三维视觉,高精地图相关的文章与技术,欢迎各位加入我们,一起每交流一起进步,有兴趣的可联系微信:920177957。本文来自点云PCL博主的分享,未经作者允许请勿转载,欢迎各位同学积极分享和交流。 摘要 自动驾驶对高精地图的需求日益重要,本文主要是研究3D激光雷达传感器如何进行强度标定,能够利用标定后的强度信息实现路标的提取和识别, 典型的激光雷达传感器测量值包

头戴式AR/VR 光学标定
文章:A Survey of Calibration Methods for Optical See-Through Head-Mounted Displays 作者:Jens Grubert , Yuta Itoh, Kenneth Moser 编译:点云PCL 本文仅做学术分享,如有侵权,请联系删除。欢迎各位加入免费知识星球,获取PDF论文,欢迎转发朋友圈。内容如有错误欢迎评论留言,未经允许

相机模型与成像过程:深入解析相机内参、外参及标定方法
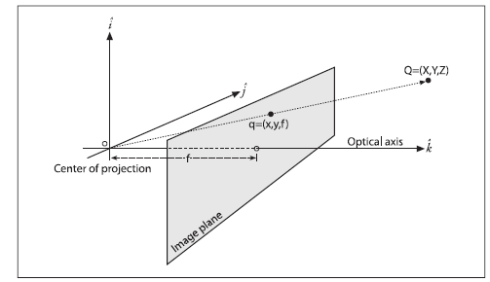
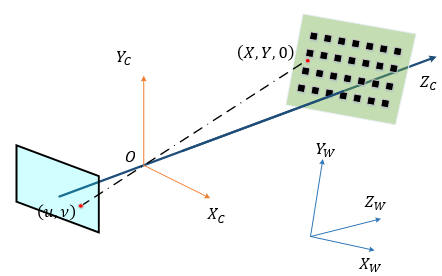
相机模型与成像过程:深入解析相机内参、外参及标定方法 引言 相机作为图像采集的重要设备,在图像处理、计算机视觉及机器视觉等领域扮演着核心角色。了解相机的成像原理、模型参数及标定方法,对于提升图像质量和后续处理效果至关重要。本文将详细解析相机模型与成像过程。 相机模型与成像过程 针孔相机模型 针孔相机模型是计算机视觉和摄影中广泛使用的一个基础模型,它模拟了光线通过一个理想化的针孔(即相

ABB机器人教程:工具载荷与有效载荷数据自动标定操作方法
目录 概述 工具载荷自动标定前的准备工作 进入载荷识别服务例行程序 工具载荷识别与标定操作 有效载荷识别与标定操作要点 4轴码垛类型机器人载荷数据标定说明 概述 在使用ABB机器人前需要正确标定一些关键数据,其中就包含载荷数据。理论上讲,安装在机器人上的所有设备均需标定其载荷数据。如果没有标定或没有准确标定载荷数据,会导致机器人机械结构过载,这样不仅机器人无法发挥其最大能力,而
Matlab 单目相机标定(内置函数,棋盘格)
文章目录 一、简介二、实现代码三、实现效果参考资料 一、简介 具体的标定原理可以参阅之前的博客Matlab 单目相机标定(内置函数),这里实现对棋盘格数据的标定过程。 二、实现代码 getCameraCorners.m function [camCorners, usedImIdx, imCheckerboard] = getCameraCorners(cali
手把手教你实现条纹结构光三维重建(3)——相机投影仪标定
我们都知道,投影仪其实就是个反向相机,如果我们了解双目标定的原理,那么相机和投影仪的标定就不难,关键是我们怎么得到投影仪在图像特征点(比如棋盘格角点)上的像素位置。 投影仪也类似于一个cmos,图像有像素位置(u,v),那么通过我们上一讲的条纹解码,给图像添加水平方向和垂直方向的投影,就可以通过解码,得到图像对应的投影相位值,此相位值就是投影的像素坐标(xp,yp)。如下图所示,具体的原理可以参
双目立体视觉 I:标定和校正
点击上方“AI公园”,关注公众号,选择加“星标“或“置顶” 作者:Ali Yasin Eser 编译:ronghuaiyang 导读 双目立体校正和标定。 大家好!今天我们将讨论什么是立体摄像机,以及我们如何将它用于计算机视觉。通过使用这里的代码:https://github.com/aliyasineser/stereoDepth,我将解释我们如何为立体摄像机校准摄像机并计算视差图。我不
计算机图形学之图像变换与标定
一.齐次坐标的定义 1.齐次坐标定义 2.齐次坐标的理解 二.最小二乘法 1.最小二乘法 2.最小二乘计算仿射矩阵 三.图像变换 1.关于图像变换的总结 2.旋转矩阵推导 3.刚体变换与仿射变换实现 4.利用SVD求解刚体变换矩阵 5.计算两个点集间的刚体变换 6.奇异值分解的推理 7.3D点云配准之刚体变换 四.标定 1.九点标定 2.opencv九点标定 五.
使用Camera Calibration Toolbox for Matlab进行摄像机标定
Camera Calibration Toolbox for Matlab: http://www.vision.caltech.edu/bouguetj/calib_doc/ 一些摄像机标定的Matlab工具箱(含Kinect和激光):http://blog.exbot.net/archives/60 kinect深度图与摄像头RGB的标定与配准:http://m.blog.csdn

OpenCV相机标定函数
原文转自:http://blog.sina.com.cn/s/blog_b364631a0101imw3.html 照相机定标 [ 编辑] ProjectPoints2 投影三维点到图像平面 void cvProjectPoints2( const CvMat* object_points, const CvMat* rotation_vector, const

从普通相机模型到鱼眼畸变模型--标定与去畸变
目录 普通相机模型普通成像模型针孔模型与透镜组:径向畸变切向畸变现代手机摄像头的基本组成内参矩阵 畸变模型张氏标定法 鱼眼模型透镜组r和f的进一步说明等距投影模型(OpenCV::fisheye)鱼眼图像去畸变过程 普通相机模型 普通成像模型 普通相机模型一般通过pin-hole model+径向畸变+切向畸变进行建。 针孔模型与透镜组: 针孔模型即小孔成像模型,近代的摄