本文主要是介绍ABB机器人教程:工具载荷与有效载荷数据自动标定操作方法,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
目录
概述
工具载荷自动标定前的准备工作
进入载荷识别服务例行程序
工具载荷识别与标定操作
有效载荷识别与标定操作要点
4轴码垛类型机器人载荷数据标定说明
概述
在使用ABB机器人前需要正确标定一些关键数据,其中就包含载荷数据。理论上讲,安装在机器人上的所有设备均需标定其载荷数据。如果没有标定或没有准确标定载荷数据,会导致机器人机械结构过载,这样不仅机器人无法发挥其最大能力,而且运动精度也会受到影响。
本篇内容只介绍机器人工具载荷与有效载荷的相关内容,其他载荷后期会陆续介绍。
对于焊接、切割、喷涂、机加工等类型的应用,要标定机器人工具自身的载荷数据;对于搬运、固定工具类型的应用,除了标定搬运工具的载荷数据外,还要标定工件的有效载荷数据。
载荷数据通常由质量、重心坐标和转动惯量组成,在ABB机器人上这些数据都支持手动输入,但是有些情况这些数据的获取与计算会比较困难。
为了方便用户标定载荷数据,ABB机器人系统内置了服务例行程序LoadIdentify。该例行程序能够自动识别安装在机器人上的工具载荷数据,以及搬运工件的有效载荷数据,并实现自动标定。
工具载荷自动标定前的准备工作
在ABB机器人上,运行LoadIdentify服务例行程序标定工具载荷之前,要先确保:
- 工具已正确安装。
- 在示教器手动操纵窗口中已选定工具。
- 机器人轴6接近水平(机械零点位置)。
- 要识别质量,还要先标定好安装在机器人上臂上的载荷(若有)。
- 机器人轴3、轴5和轴6不要过于接近其相应的关节运动极限。
- 机器人运行速度设置为100%。
- 系统处于手动低速运行模式。
进入载荷识别服务例行程序
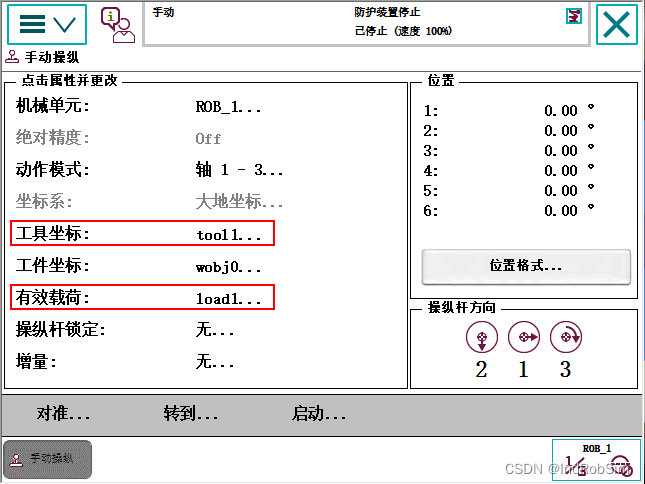
机器人示教器上依次点击“主菜单”→“手动操纵”→“工具坐标”,在工具界面中选择要标定载荷数据的工具,如下图所示,点击“确定”。

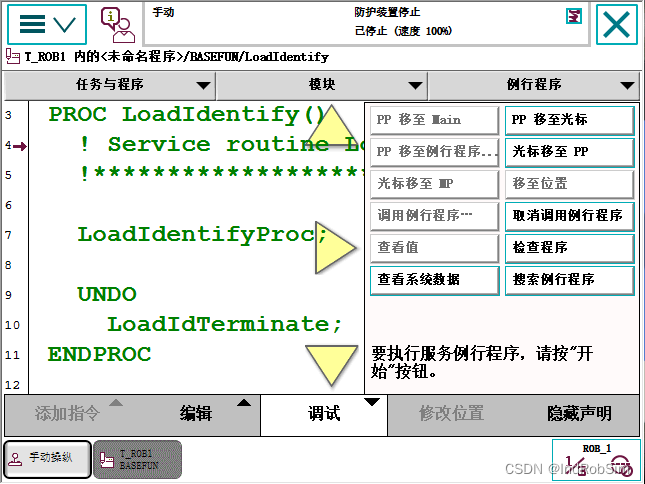
依次点击“主菜单”→“程序编辑器”,进入任意的例行程序。然后点击“调试”,在弹出的调试菜单中选择“PP移至Main”或“PP移至光标”或“PP移至例行程序”,此时调试菜单中的“调用例行程序”由不可用状态变为可用状态,如下图所示。

点击“调用例行程序”,在调用服务例行程序窗口中选择“LoadIdentify”,如下图所示,点击“转到”。
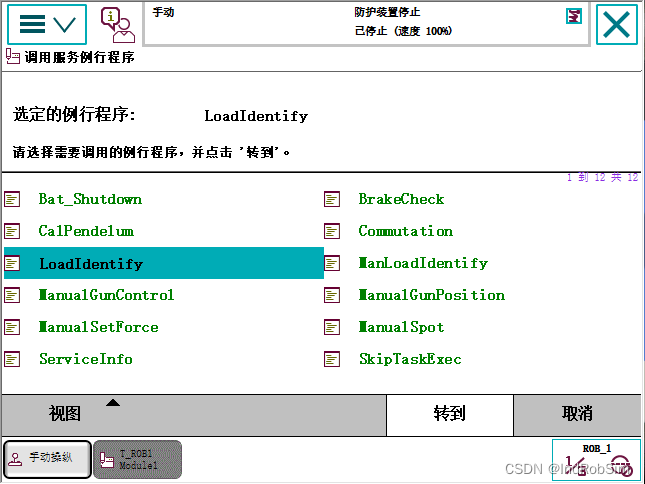
这样,就进入了ABB机器人系统内置的载荷识别服务例行程序,示教器也跳转到了此例行程序窗口,如下图所示。
工具载荷识别与标定操作
准备工作就绪后,按下“使能”按钮开启电机,就可以标定工具载荷数据了。ABB机器人厂商为LoadIdentify程序开发了操作向导,标定过程中会在操作员窗口中提示上一步操作的反馈信息和下一步的操作方法。
在示教器的操作面板上按下“开始”按钮,会打开操作员窗口,提示“在执行过程中,程序指针将会丢失,当前路径将被清除。完成服务例行程序后,会将pp设为main。”如下图所示,点击“OK”继续。

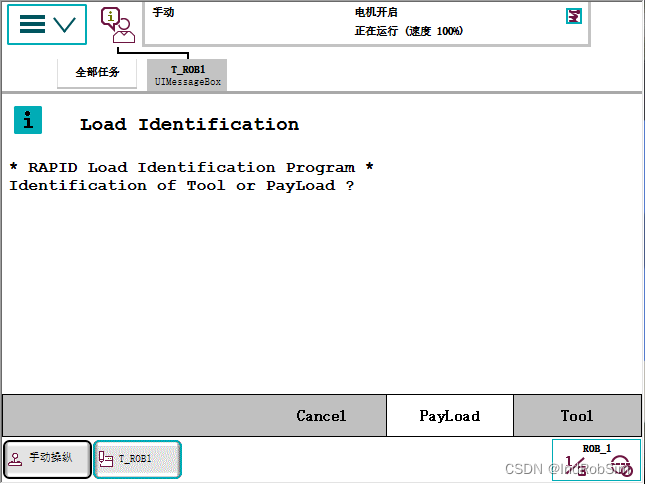
提示“要识别工具还是有效载荷?”如下图所示,本案例选择工具,因此点击“Tool”。

提示“要识别的工具必须安装在机器人上,已定义了名称并在手动操纵窗口中激活(已选定)。必须标定安装在手臂上的负载数据(若有),以及机器人轴(1-6)在合适的位置。”如下图所示,确认这些要求都无误后点击“OK”。一般情况下,机器人的各轴回到机械零点位置就是合适的位置。

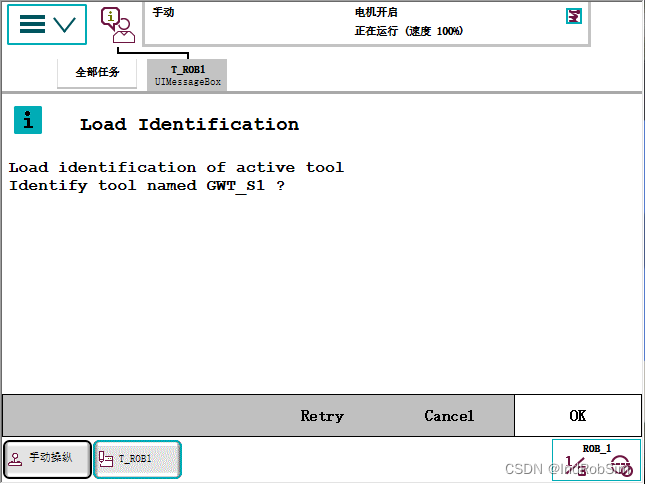
提示“要标定的工具名称是xxx?”如下图所示,确认无误后点击“OK”。载荷数据标定服务例行程序会自动识别出机器人当前已选定的机器人工具,并对其进行识别与标定,因此在标定之前要事先选择好要标定的工具。
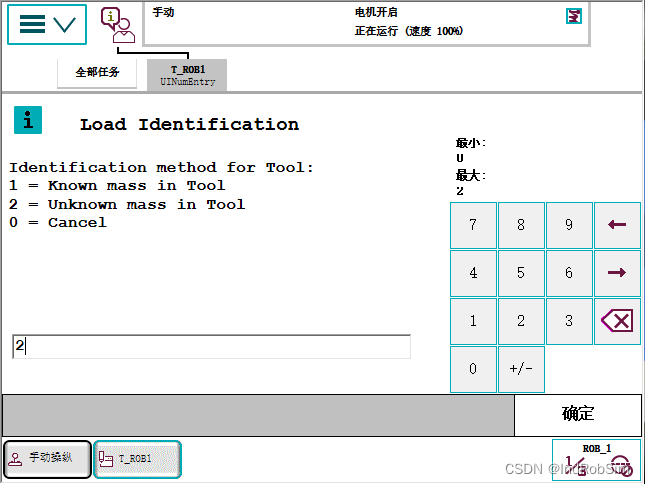
提示“工具识别方法”,如下图所示,系统给出了3个选项,分别是“1.已知工具质量”,“2.未知工具质量”,“0.取消”。一般情况下,选择选项2,即让机器人自己来识别工具的质量。
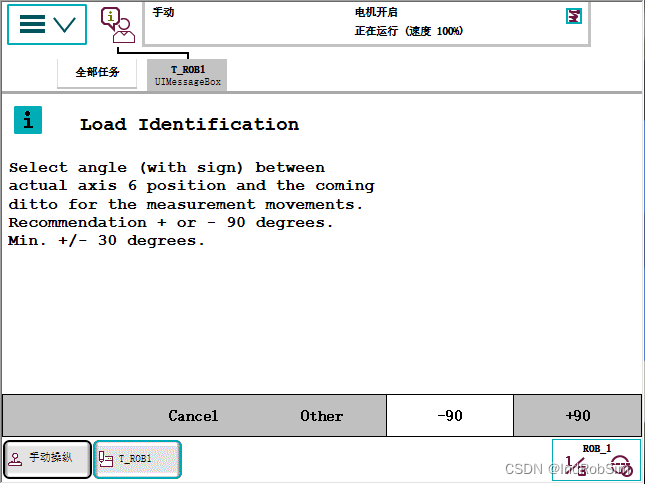
提示“选择轴6的实际位置与下一个测量运动要到达的位置之间的角度,建议选择±90°,最小为±30°。”如下图所示,本案例选择“-90”。
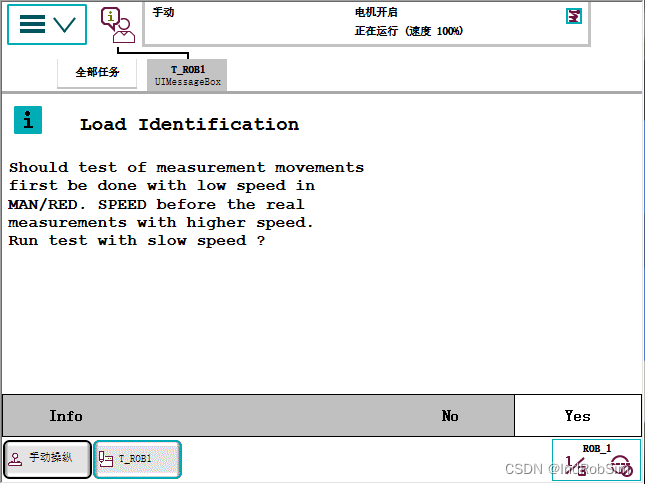
提示“应先在手动低速模式下以低速对测量运动进行测试,然后再以更高的速度进行实际测量,是否以慢速进行测试?”如下图所示,点击“Yes”。此步骤是为了让操作人员观察机器人在识别运动过程中,各轴的运动情况,并检查是否会与周边设备发生干涉,避免出现意外。如果能够确定机器人不会与周边设备发生干涉,也可以直接点击“No”,直接进入识别环节。
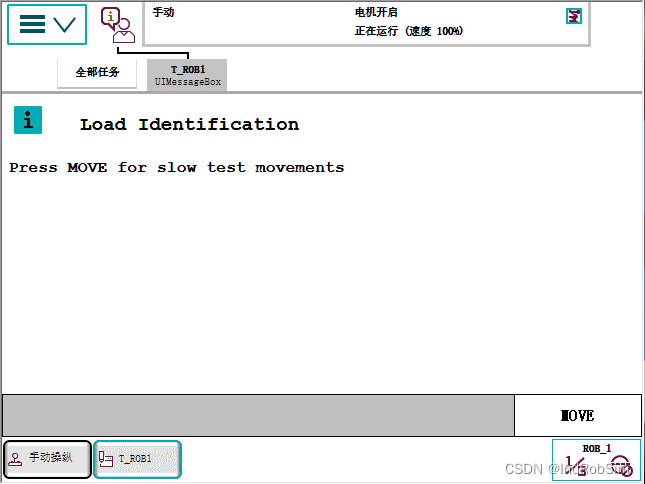
提示“按MOVE(运动)进行慢速测试运动”,如下图所示,点击“MOVE”。
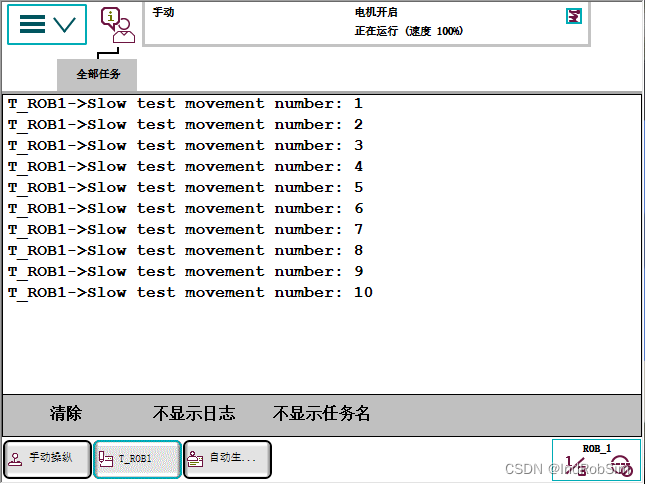
此时,机器人开始慢速测试运动,同时操作员窗口中显示出测试运动次数,如下图所示。测试运动将持续数次,在这个过程中要一直按住“使能”按钮,尽量避免中途停止。
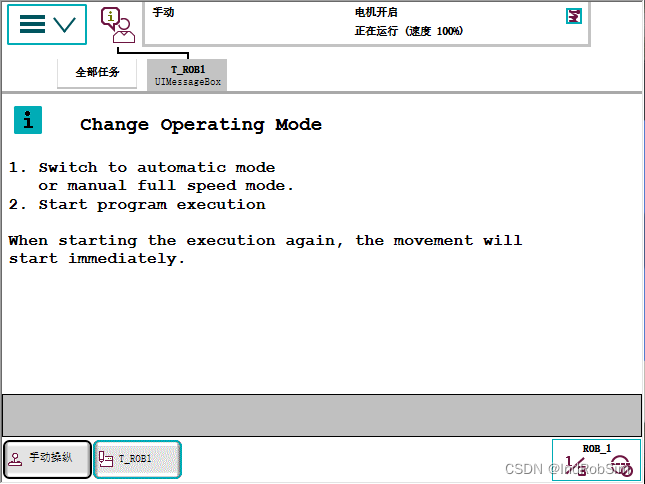
测试运动结束后,操作员窗口提示“更改操作模式:1.切换到自动模式或手动全速模式。2.开始执行程序。再次开始执行时,运动将立即开始。”如下图所示。建议将机器人切换为自动运行模式,开启电机后,再按“开始”键执行程序。如果使用手动全速模式,那么就要全程按着“使能”按钮,这样时间久了容易造成手部疲劳。
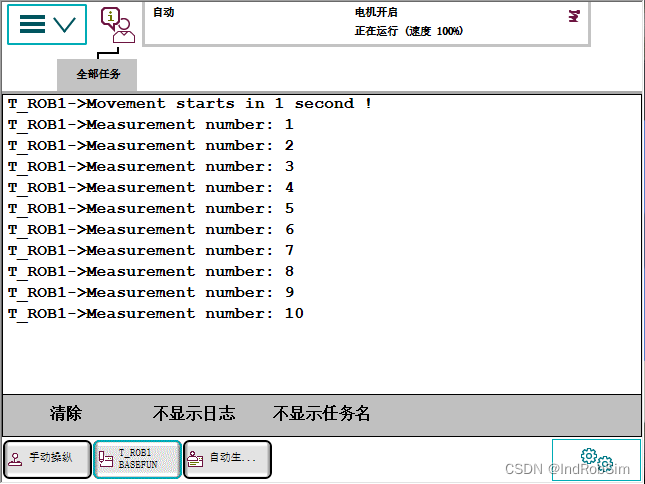
按“开始”键后程序开始执行,机器人自动运行,进行工具载荷识别,示教器回到操作员窗口,并显示运动次数,如下图所示。识别运动将持续数次,耐心等待即可。
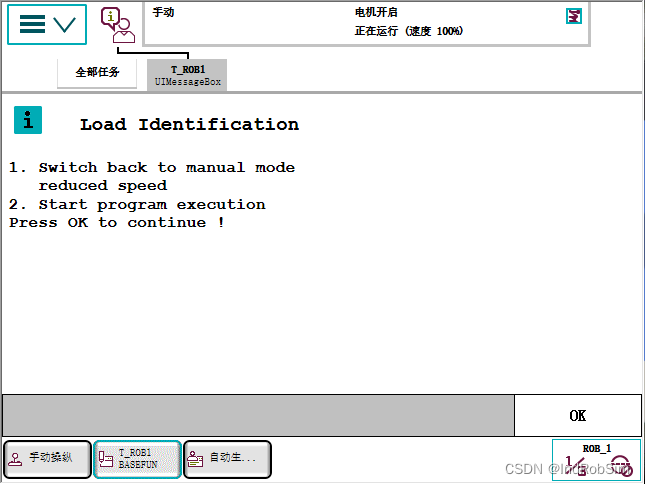
机器人识别运动完成后,操作员窗口提示“1.切换回手动低速模式。2.开始执行程序。”如下图所示。将机器人切换回手动低速模式,按“开始”键,返回操作员窗口,再点击“OK”。
提示“该服务程序未在真实的机器人系统上执行,没有计算出实际值。”如下图所示,点击“OK”。本案例服务程序是在RobotStudio中的虚拟机器人系统上运行的,因此会有这样的提示。若在真实的机器人系统上运行,则不会有此提示。

稍等片刻后,操作员窗口显示出工具识别结果,包括工具质量(单位:Kg)和工具重心坐标(单位:mm),如下图所示。此时点击“Yes”就会将识别出的载荷数据更新到当前已选定的工具数据中,点击“No”则直接退出并且不保存识别数据。

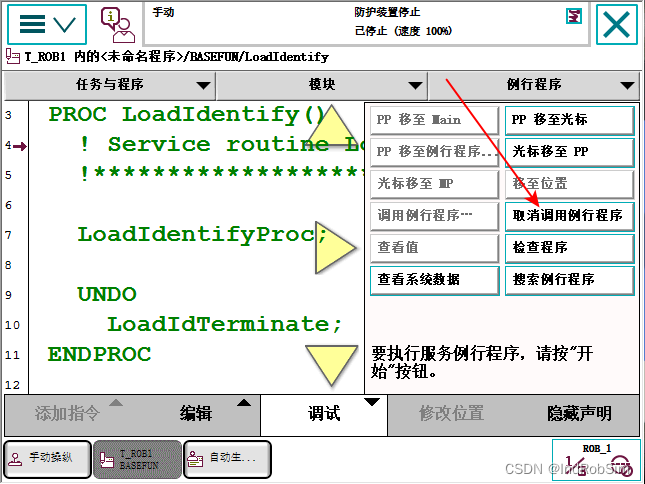
识别结束后,如果未退出LoadIdentify服务例行程序,可以点击“调试”,在调试菜单中点击“取消调用例行程序”,如下图所示,这样就能退出服务例行程序了。
注:当工具或有效载荷的质量未知时,某些情况下可能会识别出0Kg的质量。如果载荷与机器人的最大负载能力相比非常小,那么质量为0 kg也是可以的。
有效载荷识别与标定操作要点
ABB机器人的LoadIdentify服务例行程序也能自动识别与标定有效载荷,在运行LoadIdentify服务例行程序识别有效载荷之前,要先确保:
- 工具已正确安装,并且有效载荷(工件)已准确安装到工具上。
- 工具TCP数据和载荷数据均已标定(先运行LoadIdentify标定工具载荷数据)。
- 使用固定工具(外部TCP)时,相应的工件坐标数据也要处于已标定状态。
- 在示教器手动操纵窗口中已选定工具和要标定的有效载荷,如下图所示。
其他准备工作与工具载荷自定标定前准备工作一致。
运行LoadIdentify服务例行程序过程中,当操作员窗口提示“要识别工具还是有效载荷?”时,要点击“PayLoad”,如下图所示。其他操作与工具载荷识别与标定操作类似,可参考上述步骤执行。
4轴码垛类型机器人载荷数据标定说明
在4轴码垛类型的机器人而非6轴机器人上运行服务程序LoadIdentify识别载荷数据时,会出现一些差异。

在识别过程中,机器人会使用的第1个轴(或2轴),且该轴将从其当前位置运动约±23°,因此产生的运动幅度可能会比较大。因为4轴机器人没有6轴,所以机器人无法识别出负载的所有数据,这些数据包括:绕X轴的转动惯量(Ix)、绕Y轴的转动惯量(Iy)、重心的Z坐标(mz)。
不过,对于这种类型的机器人,这些无法识别的数据对其运动性能的影响可以忽略不计。
The End
上一篇:RobotStudio教程:ABB机器人写空心文字虚拟仿真
这篇关于ABB机器人教程:工具载荷与有效载荷数据自动标定操作方法的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







