abb专题

C1-2 ABB二次SDK开发——手把手教登录对应的机器人控制器(图片引导操作)登录机器人控制器和刷新机器人列表
1.完成配置后我们开始进行操作 C1-1 ABB二次SDK开发——C#Window窗体-环境配置(带ABB二次开发SDK资源包)-CSDN博客文章浏览阅读95次。3.记住路径,右键C#引用,然后导入ABB.Robotics.Controllers.PC.dll。2.安装资源文件PCABB二次开发的SDK,并打开安装路径。1.新建VSC#的windowfrom项目。4.在框架代码主界面代码中添加。

C1-1 ABB二次SDK开发——C#Window窗体-环境配置(带ABB二次开发SDK资源包)
一.使用Visual Stdio创建一个项目 1.新建VSC#的windowfrom项目 2.安装资源文件PCABB二次开发的SDK,并打开安装路径 3.记住路径,右键C#引用,然后导入ABB.Robotics.Controllers.PC.dll 4.在框架代码主界面代码中添加 using ABB.Robotics.Controllers;using ABB.Roboti

ABB机器人配置DSQC652通信板的具体方法
ABB机器人配置DSQC652通信板的具体方法 DSQC652通信板共有5个接线端子X1~X5,其中X2为DO数字输出;X4为DI数字输入; DSQC652设备地址如何设置和计算? 如下图所示,如果7-12端子均和6端子短接(即所有的管脚此时都是低电平),则DSQC652设备的默认地址=1+2+4+8+16+32=63, 如下图所示,如果8和10端子被剪掉,则DSQC652地
LabVIEW编程控制ABB机械臂
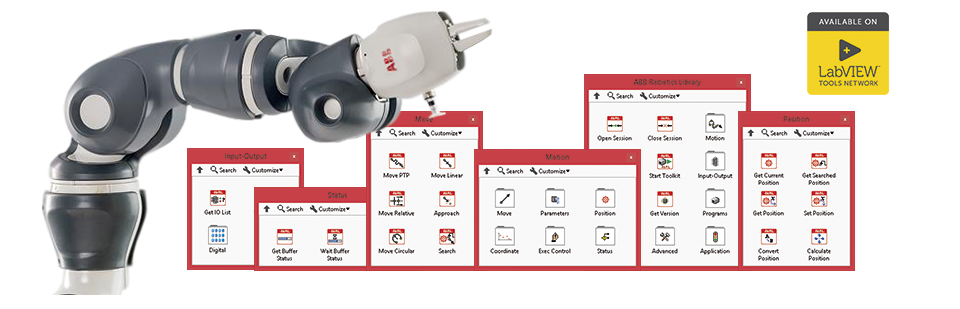
使用LabVIEW编程控制ABB机械臂是一项复杂但十分有价值的任务。通过LabVIEW,可以实现对机械臂的精确控制和监控,提升自动化水平和操作效率。 1. 项目规划和硬件选型 1.1 确定系统需求 运动控制:确定机械臂需要执行的任务,如抓取、搬运、装配等。 传感器集成:确定需要集成的传感器,如位置传感器、力传感器、视觉传感器等。 通讯接口:确定与ABB机械臂控制器的通讯接口,如Ethe

ABB机器人教程:工具载荷与有效载荷数据自动标定操作方法
目录 概述 工具载荷自动标定前的准备工作 进入载荷识别服务例行程序 工具载荷识别与标定操作 有效载荷识别与标定操作要点 4轴码垛类型机器人载荷数据标定说明 概述 在使用ABB机器人前需要正确标定一些关键数据,其中就包含载荷数据。理论上讲,安装在机器人上的所有设备均需标定其载荷数据。如果没有标定或没有准确标定载荷数据,会导致机器人机械结构过载,这样不仅机器人无法发挥其最大能力,而

ABB机械手3HAC024518-001电机振动过大维修方案
【ABB机械臂伺服电机维修方案】 1. 更换轴承 如果检查发现轴承磨损,我们需要更换新的轴承。请选择与原轴承型号相同的产品,以确保电机正常运行。 2. 重新平衡转子 如果ABB机械手3HAC024518-001电机转子不平衡,我们需要重新平衡转子。这可以通过在转子特定位置增加或去除材料来实现。请遵循相关安全操作规程,确保平衡操作正确。 3. 修复定子绕组 如果定子绕组短路,我们需要修复定子绕组。这
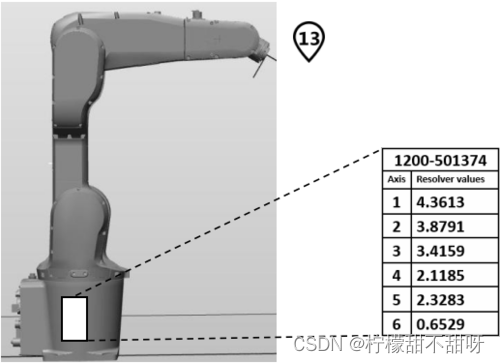
ABB机器人SMB板卡的安装及更换方法
ABB机器人SMB板卡的安装及更换方法 SMB板卡: ABB机器人的串行测量板,即SMB板(Serial measurement board)是用来记录机器人的每个轴的原点及运行轨迹的。 机器人的运动是由电机带动齿轮箱进行运动的。电机的位置信息则由安装在电机尾端的编码器反馈给SMB板,SMB板再连接到机器人控制柜 。 SMB的作用: 旋变编码器信号模拟量转数字量。记录电机圈数
Modbus转Profinet网关连接ABB变频器Modbus通讯调试
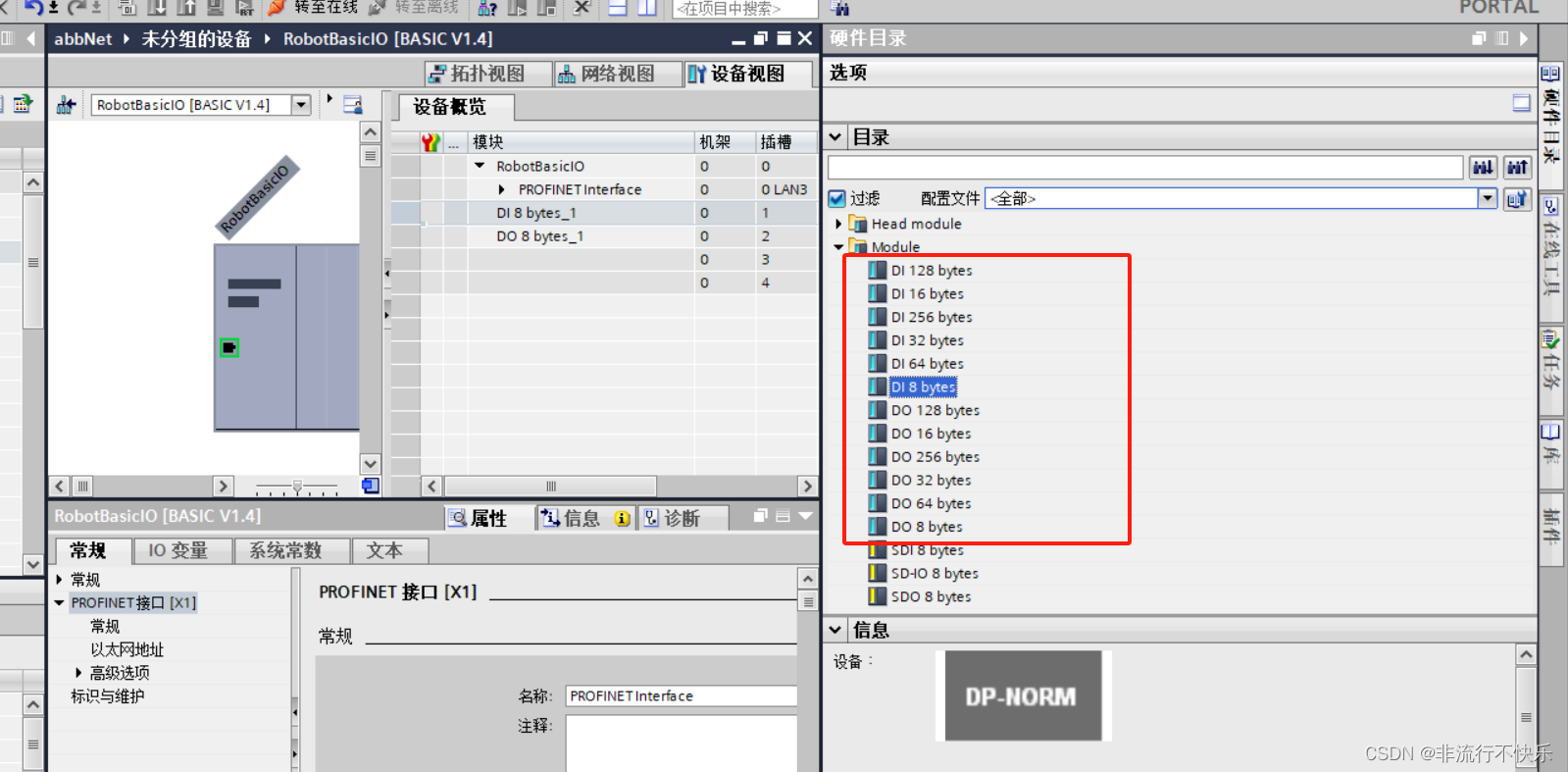
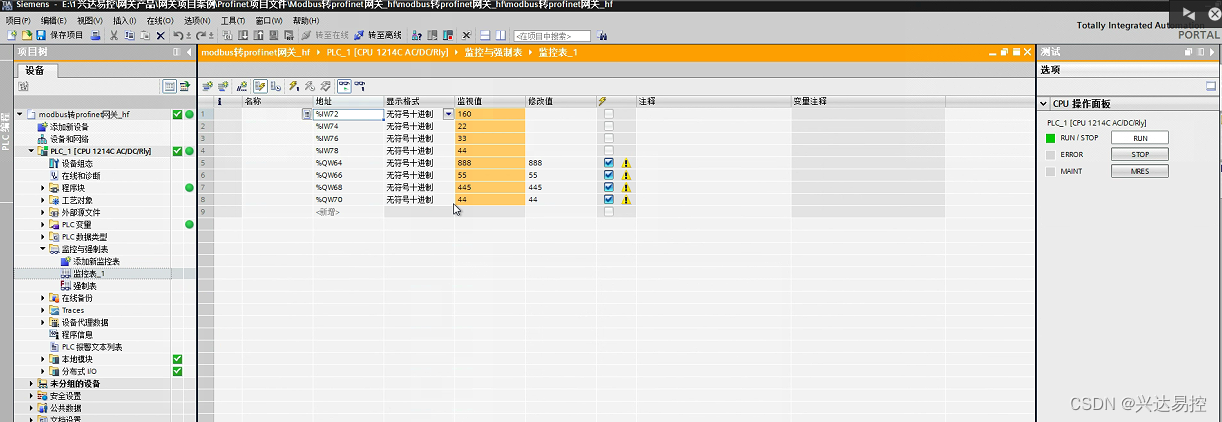
一、前景:在工业自动化领域,Modbus协议和Profinet协议是两种常见的通讯协议,而ABB变频器作为一种常用的变频控制设备,其通讯调试对于系统稳定运行至关重要。 二、优势:Modbus协议转Profinet协议网关能够实现不同协议之间的无缝对接和通信,为工业自动化系统的互联提供了便利。通过网关的转换作用,Modbus和Profinet两种协议之间的数据传输变得更加高效可靠,有效解决了不

ABB控制主板3BHE024855R0101 UF C921 A101
控制板也是一种电路板,其运用的范围虽不如电路板来的宽泛,但却比普通的电路板来的智能、自动化。简单的说,能起到控制作用的电路板,才可称为控制板。大到厂家的自动化生产设备,小到孩童用的玩具遥控汽车,内部都用到了控制板。 工业控制板 在工业设备中通常叫电源控制板,电源控制板又常可分为中频电源控制板和高频电源控制板。中频电源控制板通常接在可控硅中频电源上和其他的中频工业设备配合使用,如中频电炉,中频淬火机
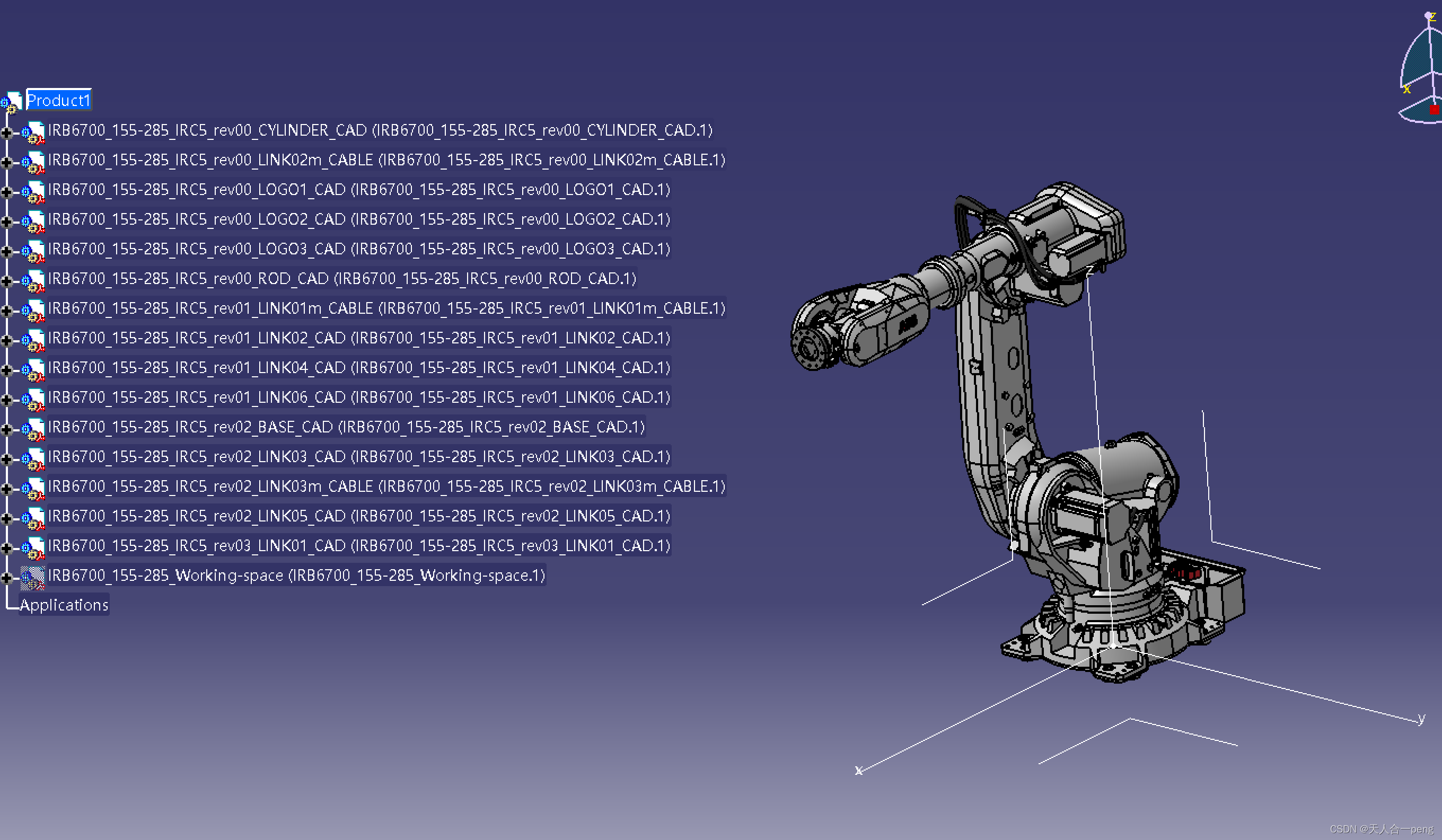
ABB机械人模型下载
可以下载不同格式的 https://new.abb.com/products/robotics/zh/robots/articulated-robots/irb-6700 step的打开各部件是分开的,没有装配在一起,打开看单个零件时,我们会发现其各零件是有装配的定位关系的。 新建一个装配环境,点出具有定位的零件功能, 然后将所有的step文件都全选 导入

1500PLC通过232自由口转profinet网关接ABB扫码枪通讯方案
一、现状: 在实际的生产环境中,越来越多的自动化设备采用扫码枪录入代替手动录入信息的方式进行操作。 二、了解现场 现场要求在不动其他设备和程序的情况下让ABB扫码枪与1500PLC通讯,在拿到现场的需求时兴达易控的专项技术为其制定了方案。 三、制定方案: 在不动其他设备和程序的情况下只需要添加一台232自由口转profinet网关(XD-PNR100),232自由口转profin

ABB码垛机器人IRB260通讯板维修
ABB码垛机器人在现代制造业中发挥着重要作用,而机器人通讯板维修对于确保机器人的正常运行至关重要。 通讯板是ABB码垛机器人与控制系统之间进行数据传输的桥梁。它负责接收控制系统的指令,并将机器人的运行数据反馈给控制系统。如果通讯板出现故障,会导致机器人无法正常工作,因此及时ABB机械手IRB260电路板维修非常重要。【常见ABB机械手板卡故障及解决方法】 1. 通讯故障:通讯板与控制系统之间的通讯

A.ABB(Manacher)
链接 https://ac.nowcoder.com/acm/problem/209398 题目描述 Fernando was hired by the University of Waterloo to finish a development project the university started some time ago. Outside the campus, the unive


【编程题-错题集】abb(动态规划)
牛客对应题目链接:abb_牛客题霸_牛客网 (nowcoder.com) 一、分析题目 线性 dp + 哈希表 1、状态表示 dp[i]:表示以 i 位置元素为结尾的所有子序列中,有多少个 _xx。 2、返回值 整张 dp 表的和。 3、状态转移方程 更新顺序: dp[i] = f[x](前)(这里是更新前的 f[x],且可以不用创建 dp
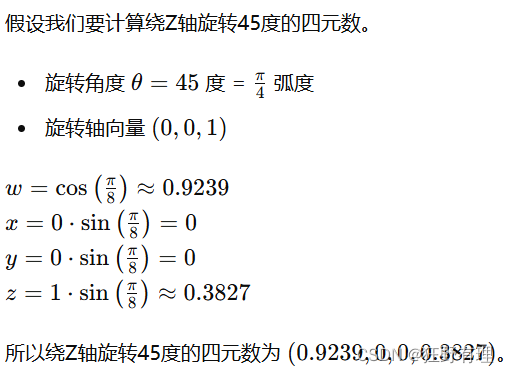
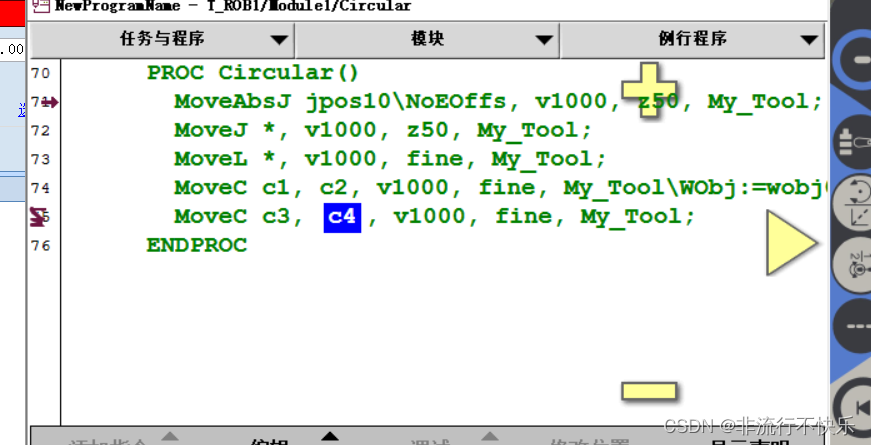
ABB机器人---基础编程
目录 第一章 代码+解释 1.1 基础代码 1.1.2 关于 VAR robtarget pos 1.1.3 关于四元数 1.2 机器人初始化程序 1.3 配置通信 (ProfiNet 示例,ABB RAPID) 1.4 设置干涉区 (ABB RAPID) 1.5 示教轨迹和自动过程 (ABB RAPID) 1.6 配置抓手并进行抓取操作 (ABB RAPID) 1.7 上下料

ABB机器人手动模式切换自动模式时,速度自动更改为100%的解决办法
ABB机器人手动模式切换自动模式时,速度自动更改为100%的解决办法 如下图所示,手动切换到自动模式时,示教器上提示:速度将改为100%,但是我们正常使用时的速度可能不是100%,所以还需要手动去更改速度,不太方便。。。 解决办法可参考以下内容: 如下图所示,打开菜单—控制面板, 如下图所示,在控制面板中找到“配置“, 如下图所示,点击“主题“—”Controller“

维修ABB示教器主板DSQC679 3HAC 033624-001 /R机器人液晶显示屏
ABB 全面的 6 轴关节型机器人产品组合为物料搬运、机器维护、点焊、弧焊、切割、组装、测试、检查、分配、研磨和抛光应用提供了理想的解决方案。 ABB 的协作机器人适用于各种规模的操作中的各种任务。它们易于设置、编程、操作和扩展。由行业领先的专家打造。并由业内最广泛的服务网络提供服务。无论您需要什么,都会为您自动化之旅的每一步提供支持。 全系列喷漆机器人可帮助您提高喷漆车间作业的生产率和质量。
ABB RobotStudio学习记录(一)新建工作站
RobotStudio新建工作站 最近遇到 虚拟示教器和 Rapid 代码不能控制 视图中机械臂的问题,其实是由于机械臂和工作站不匹配。以下是解决方法。 名称版本Robot Studio6.08 新建一个”空工作站“; 在目标位置新建一个目标文件夹 C:\solution\test,用以后续存放该工作站(通常路径不能有中文);导入机械臂模型ABB模型库;入手爪设备导入模型库 -

ABB工业机械手IRB7600减速器维修识别故障
ABB机器人齿轮箱是机器人的核心部件之一,其维护和保养直接关系到机器人的使用寿命和工作效率。ABB工业机械手减速机主要由齿轮、轴承、油封等部件组成。减速器的主要功能是将电机的旋转运动转换为机器人的线性运动,从而实现机器人的各种动作。 常见的ABB机器人减速器故障 1. 齿轮磨损:长期使用可能导致齿轮磨损,从而影响机器人的运动精度和速度。 2. 油封泄漏:油封损坏可能导致润滑油泄漏,从而影响齿轮箱的
ABB机器人跟换编码器电池
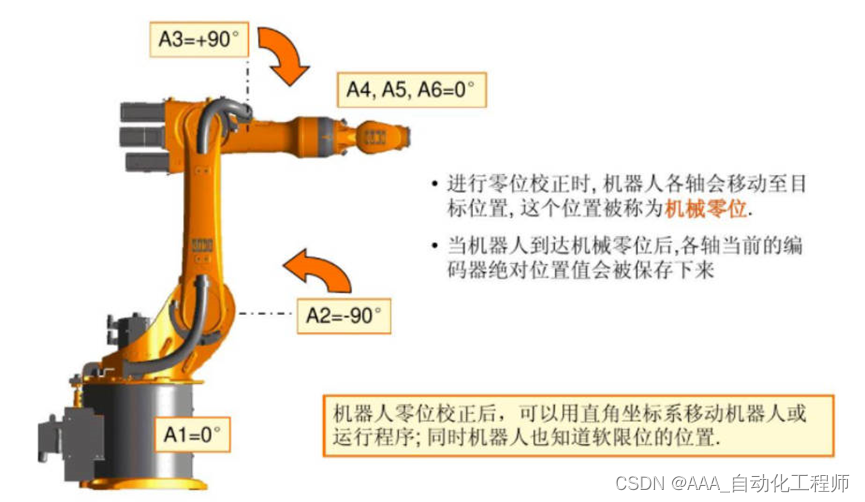
一、ABB机器人编码器电池位置 当机器人示教器报警提示,机器人电池电压过低时,需要及时跟换机器人编码器的电池。保证机器人零点位置不会因为机器人编码电池没电而丢失。一般来说,机器人的编码器电池的位置在机器人基座或者后臂附近。 二、机器人各轴回零 跟换完电池后,需要进行机器人的零点校准,进行零点校准之前需要把机器人各轴回零。按照先456轴,再123轴的原则对机器人零点的校准,将刻度线与凹槽对

ABB烟气分析仪电气箱电路板维修MBGAS-3000
ABB烟气分析仪电气箱维修MBGAS-3000,电源板维修MTFDDAT128MBD,烟气分析仪电路板维修。 MBGAS-3000分析仪是专用于燃烧过程领域,且适用于多组分含量分析的气体分析仪。它可以持续且同时测量多达25种气体的浓度。基于傅里叶变换红外光谱技术的MBGAS-3000TM气体分析仪,稳定性、灵敏度和光测量准确性都很高。同时,它的重复性(同一仪器实施重复测量的精度)和再现性(不同仪

ABB机器人信号关联Cross Connection的具体方法示例
ABB机器人信号关联Cross Connection的具体方法示例 如下图所示,点击打开菜单,然后点击控制面板进入, 如下图所示,找到配置,点击进入, 如下图所示,找到“Cross Connection” 信号关联,点击进入, 如下图所示,选中“Cross Connection”后,点击下方的“显示全部”, 如下图所示,点击下方的“添加”, 进入如下画面,
ABB机器人ScreenMaker拜年
要实现上面的效果需要机器人系统中有FlexPendant Interface [617-1]选项。 FlexPendant Interface让用户可以在FlexPendant示教器上下载和运行用户开发的操 作员界面。 ScreenMaker是用来创建用户自定义界面的RobotStudio工具。使用该工具您无需学 习Visual Studio开发环境和.NET编程即可创建自定义FlexP