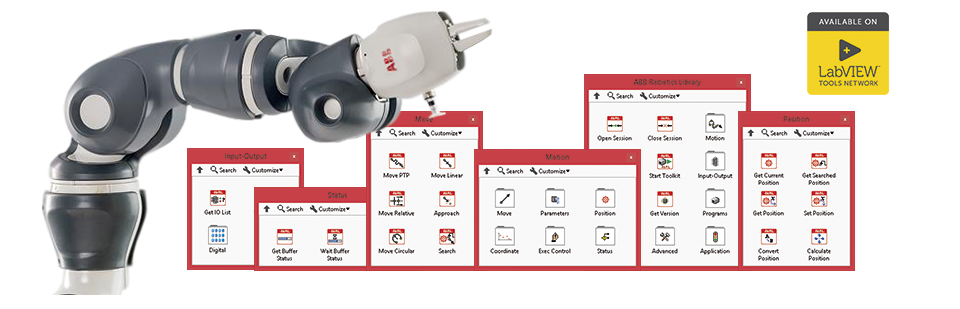
本文主要是介绍LabVIEW编程控制ABB机械臂,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
使用LabVIEW编程控制ABB机械臂是一项复杂但十分有价值的任务。通过LabVIEW,可以实现对机械臂的精确控制和监控,提升自动化水平和操作效率。
1. 项目规划和硬件选型
1.1 确定系统需求
-
运动控制:确定机械臂需要执行的任务,如抓取、搬运、装配等。
-
传感器集成:确定需要集成的传感器,如位置传感器、力传感器、视觉传感器等。
-
通讯接口:确定与ABB机械臂控制器的通讯接口,如Ethernet、RS232/RS485等。
-
安全性:考虑系统的安全需求,如紧急停止功能、安全区域检测等。
1.2 选择合适的硬件
-
上位机:运行LabVIEW,负责用户界面、数据处理和高层逻辑控制。
-
通讯接口:例如Ethernet通讯模块,用于与ABB机械臂控制器通讯。
-
传感器接口模块:如NI 9213热电偶输入模块、NI 9237应变计模块等。
2. 系统架构设计
2.1 硬件架构
-
上位机:运行LabVIEW,提供用户界面和高级控制功能。
-
ABB机械臂控制器:负责机械臂的底层运动控制和执行。
-
传感器和外围设备:用于增强系统功能,如环境监测、过程监控等。
2.2 软件架构
-
用户界面模块:提供图形用户界面(GUI),用于系统操作和监控。
-
数据采集模块:从传感器读取数据,进行必要的处理和校准。
-
运动控制模块:实现运动控制算法,如路径规划、运动轨迹控制等。
-
通讯模块:负责与ABB机械臂控制器及其他设备进行通讯。
-
安全控制模块:实现安全逻辑,如紧急停止、限位保护等。
3. LabVIEW编程
3.1 用户界面设计
使用LabVIEW的前面板设计用户界面,包含以下元素:
-
操作面板:控制按钮、滑块等,用于操作机械臂。
-
状态显示:数值指示、图表等,用于显示机械臂的实时状态和传感器数据。
-
报警和日志:显示报警信息和系统日志,便于故障诊断和维护。
3.2 数据采集和处理
-
初始化传感器:配置传感器接口模块,初始化传感器参数。
-
数据读取和处理:使用LabVIEW的DAQ(数据采集)模块,定时读取传感器数据,并进行滤波、校准等处理。
3.3 运动控制算法
-
路径规划:实现路径规划算法,如直线插补、圆弧插补等。
-
控制算法:实现控制算法,如PID控制、模糊控制等。
-
指令发送:将控制指令通过通讯模块发送给ABB机械臂控制器。
3.4 通讯实现
-
配置通讯接口:根据实际通讯需求,配置Ethernet、RS232/RS485等接口。
-
通讯协议实现:实现通讯协议,如Modbus、TCP/IP等,确保与ABB机械臂控制器的可靠通讯。
3.5 安全控制
-
安全逻辑实现:编写安全逻辑,如限位保护、紧急停止等。
-
报警处理:实现报警处理机制,当检测到异常情况时,触发报警并采取相应措施。
4. 通讯设置
4.1 配置ABB机械臂控制器
-
IP地址设置:确保上位机和ABB机械臂控制器在同一网络中,设置正确的IP地址。
-
通讯协议设置:配置ABB机械臂控制器支持的通讯协议,如TCP/IP或Ethernet/IP。
4.2 LabVIEW通讯配置
-
TCP/IP通讯:在LabVIEW中使用TCP/IP通信模块,建立与ABB机械臂控制器的连接。
-
数据格式:确定通讯数据的格式,如命令格式、数据包结构等。
5. 测试与调试
5.1 模拟仿真测试
-
离线仿真:使用LabVIEW仿真模块,离线测试运动控制算法和通讯逻辑,验证系统功能。
-
在线调试:将系统连接至实际硬件,进行在线调试,确保系统各部分协同工作。
5.2 实际应用测试
-
功能测试:测试系统的各项功能,确保其满足设计需求。
-
性能测试:测试系统的性能指标,如响应时间、控制精度等,确保其满足应用要求。
-
可靠性测试:进行长时间运行测试,检查系统的稳定性和可靠性。
6. 文档编写与维护
6.1 系统文档
-
用户手册:编写用户手册,详细说明系统的安装、操作和维护方法。
-
技术文档:编写技术文档,详细记录系统的设计原理、硬件选型、软件架构和实现方法。
6.2 系统维护
-
定期检查:定期检查系统硬件和软件,确保其正常工作。
-
故障排除:记录故障信息,分析故障原因,及时排除故障。
-
系统升级:根据实际需求,对系统进行功能升级和性能优化。
总结
使用LabVIEW编程控制ABB机械臂,可以充分利用LabVIEW的图形化编程环境和丰富的工具库,简化开发过程,提高系统的开发效率和可靠性。通过合理的硬件选型和软件架构设计,以及详细的测试与调试,最终实现一个功能完善、性能优越的工业机器人控制系统。
这篇关于LabVIEW编程控制ABB机械臂的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







