本文主要是介绍ABB 和PLC ProfinN 通信,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
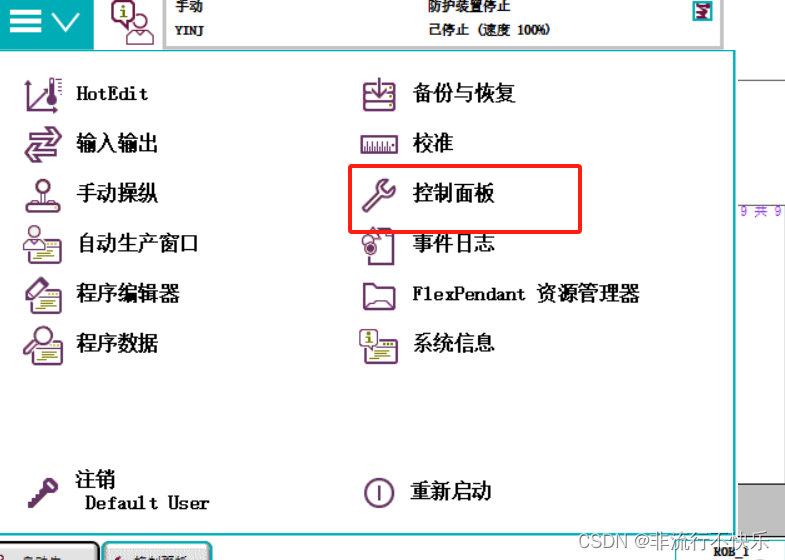
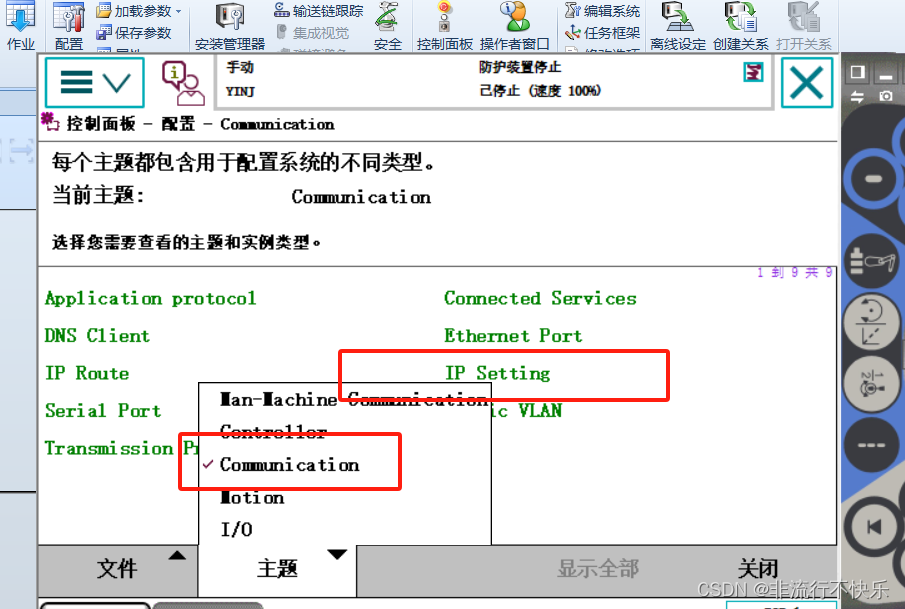
1,设置IP 地址


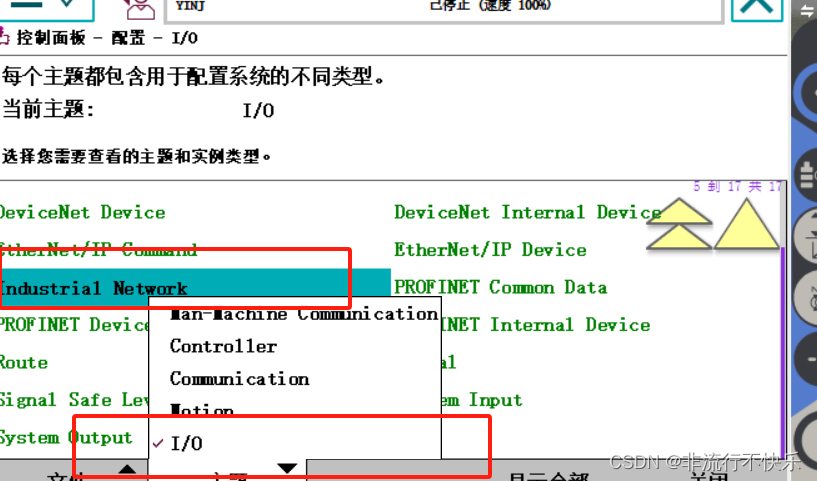
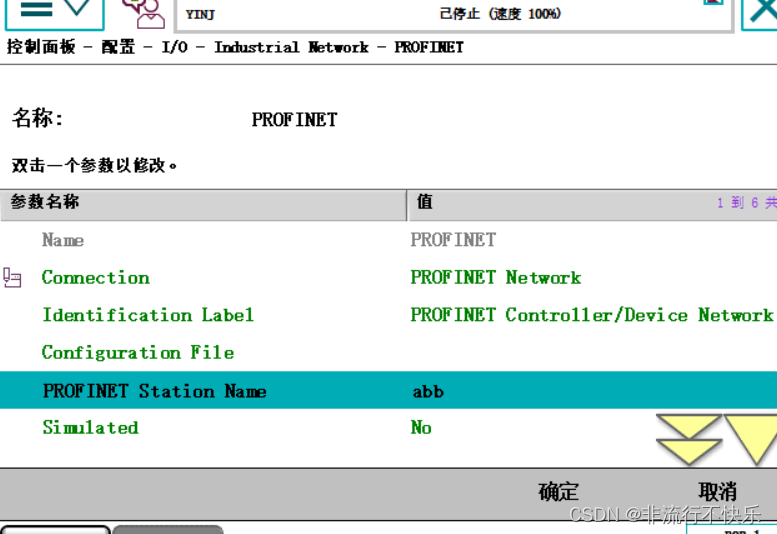
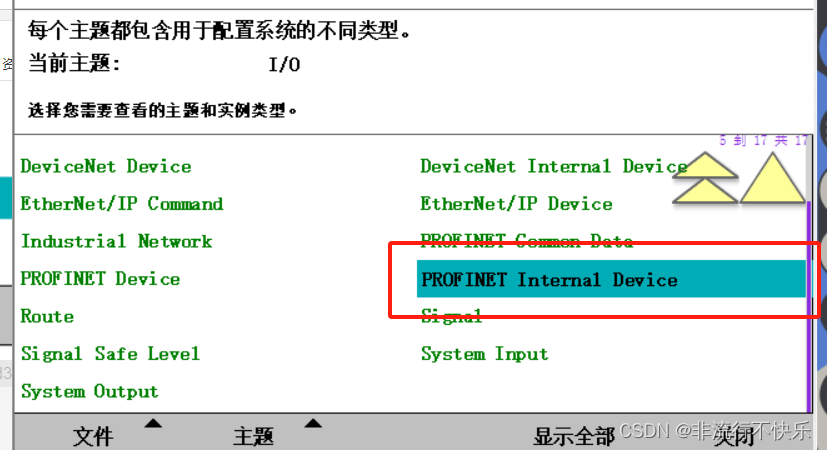
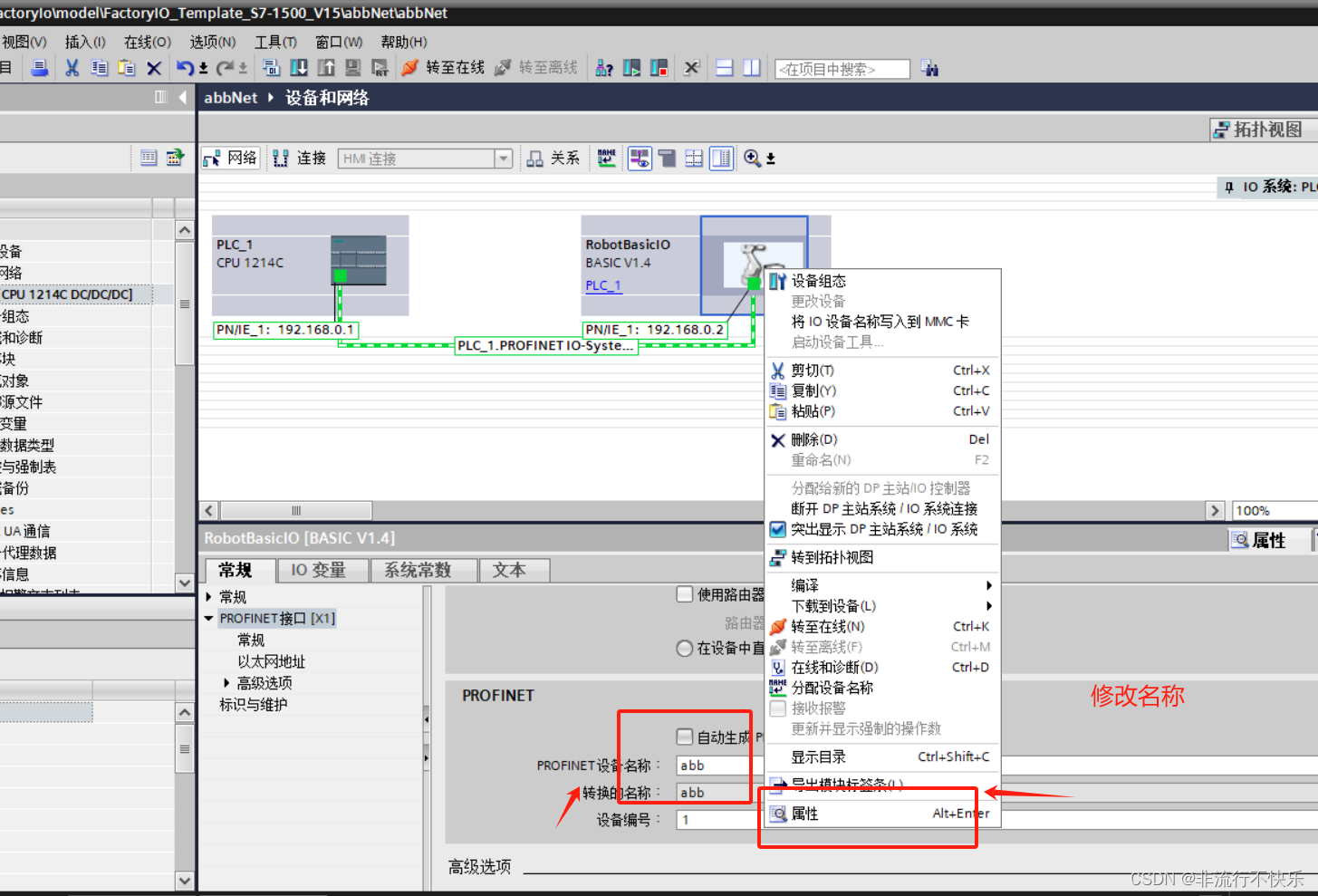
2, 设置站名称


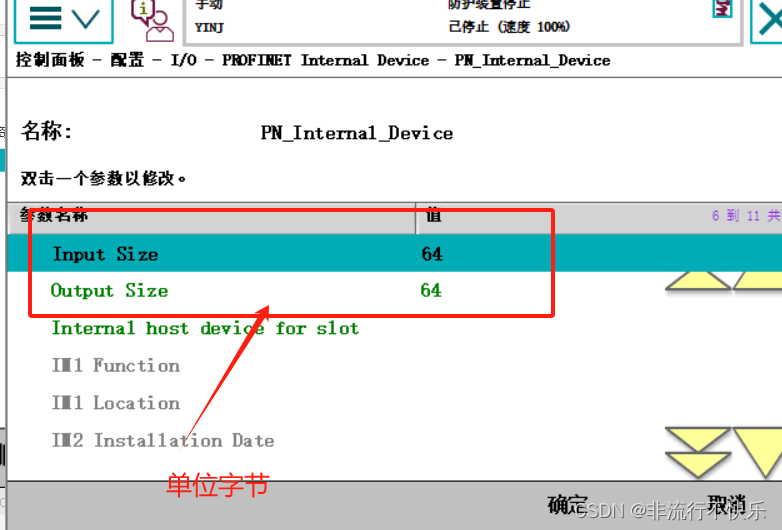
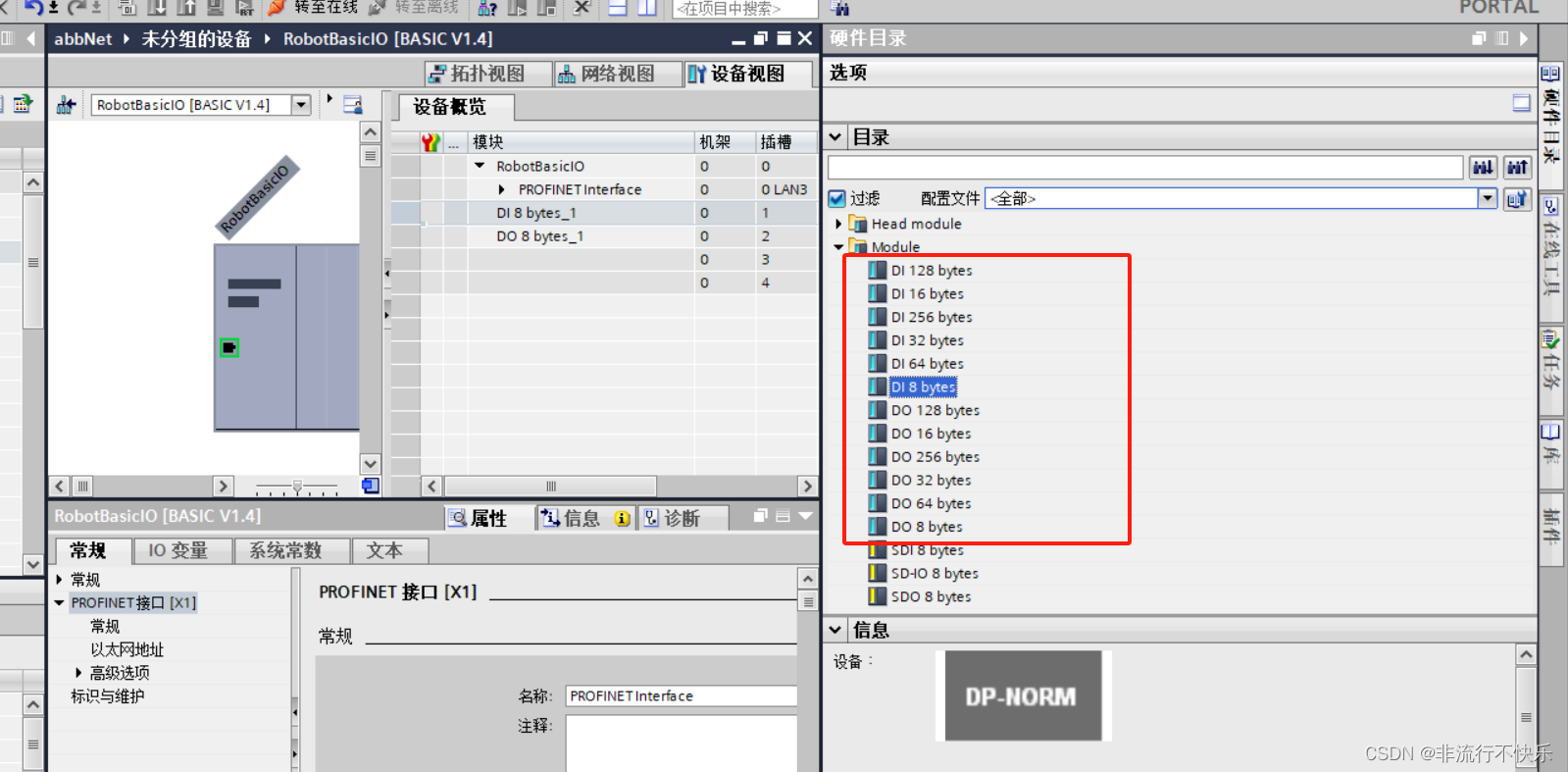
3, 修改传送区大小

4,配置DI DO

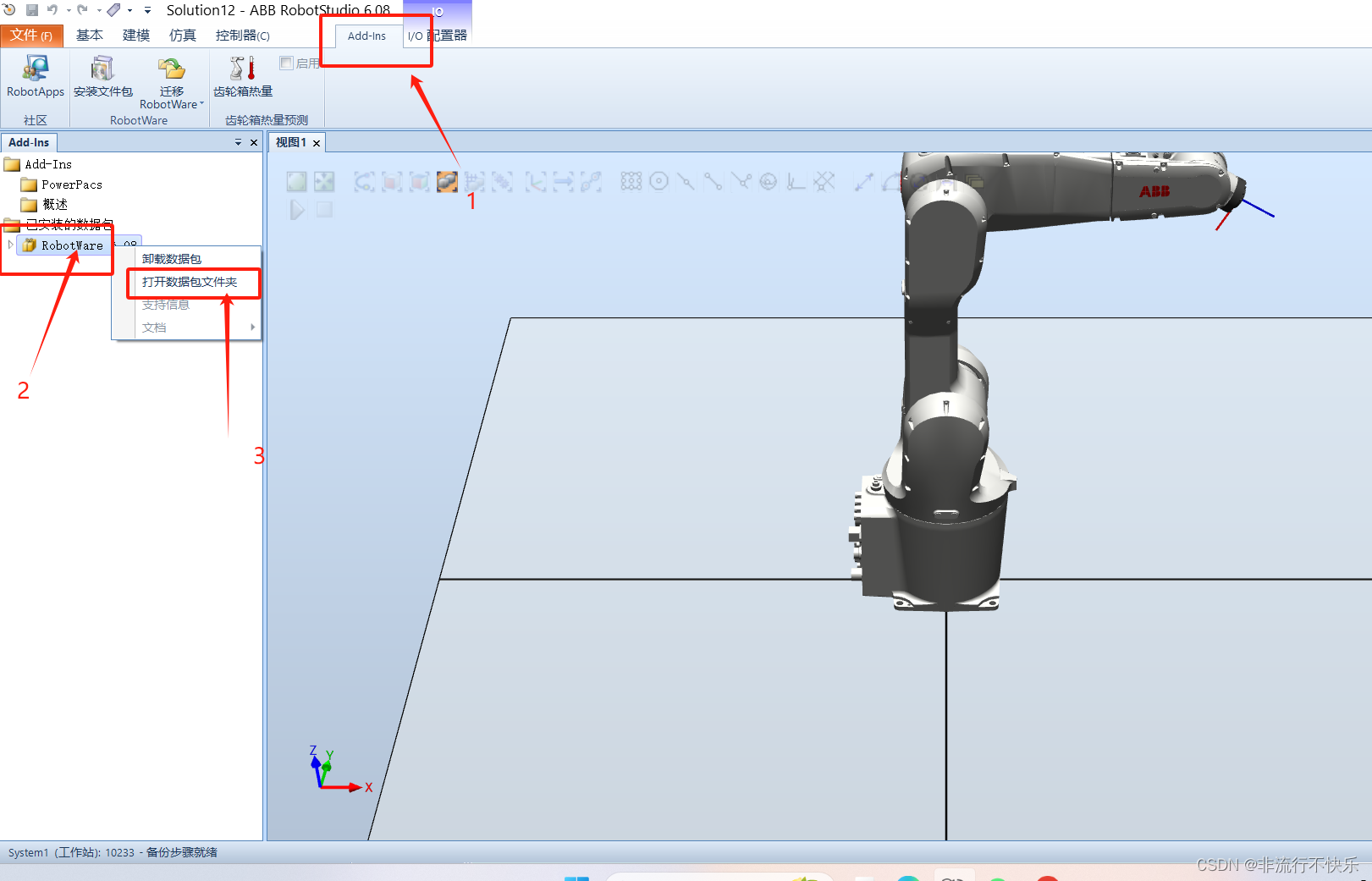
5,导出

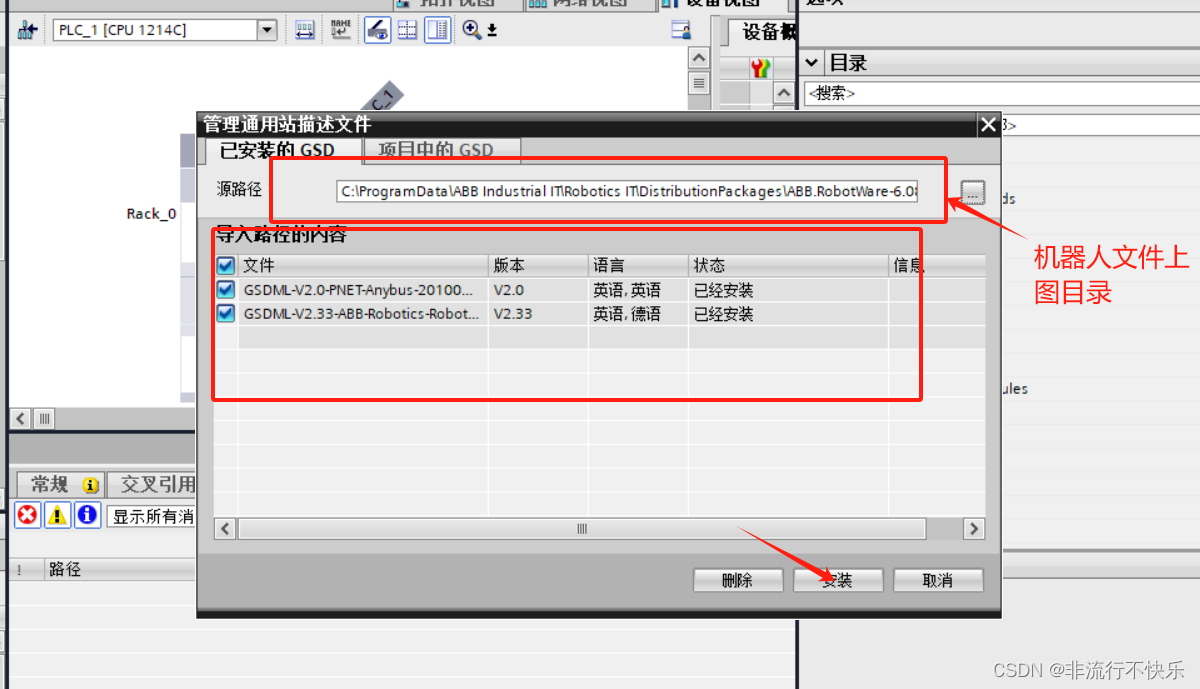
6,安装gsd 文件

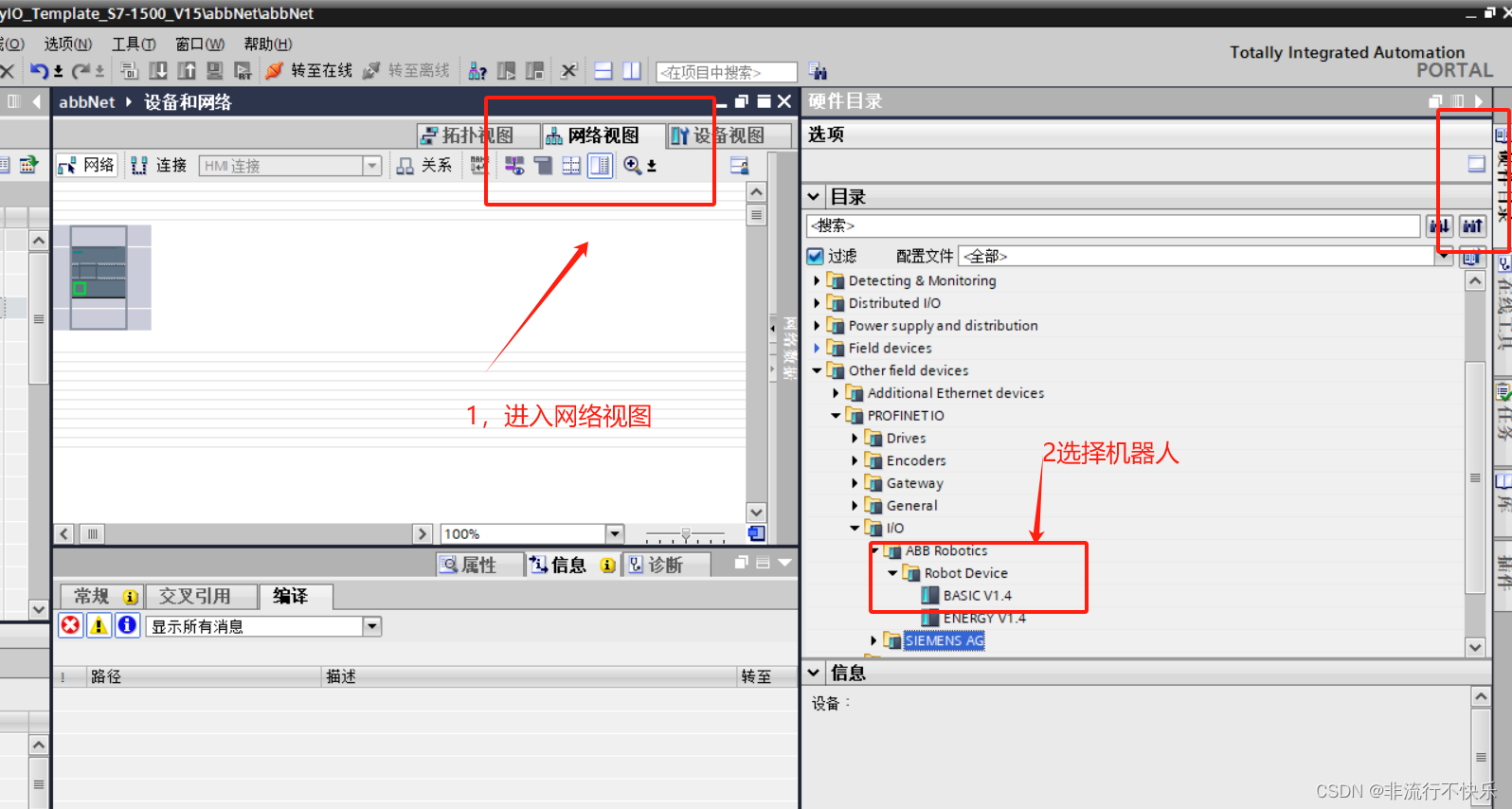
7,建立通信




这篇关于ABB 和PLC ProfinN 通信的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!
本文主要是介绍ABB 和PLC ProfinN 通信,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
1,设置IP 地址
2, 设置站名称
3, 修改传送区大小
4,配置DI DO
5,导出
6,安装gsd 文件
7,建立通信
这篇关于ABB 和PLC ProfinN 通信的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!
http://www.chinasem.cn/article/1062709。
23002807@qq.com







