本文主要是介绍ABB机器人跟换编码器电池,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
一、ABB机器人编码器电池位置
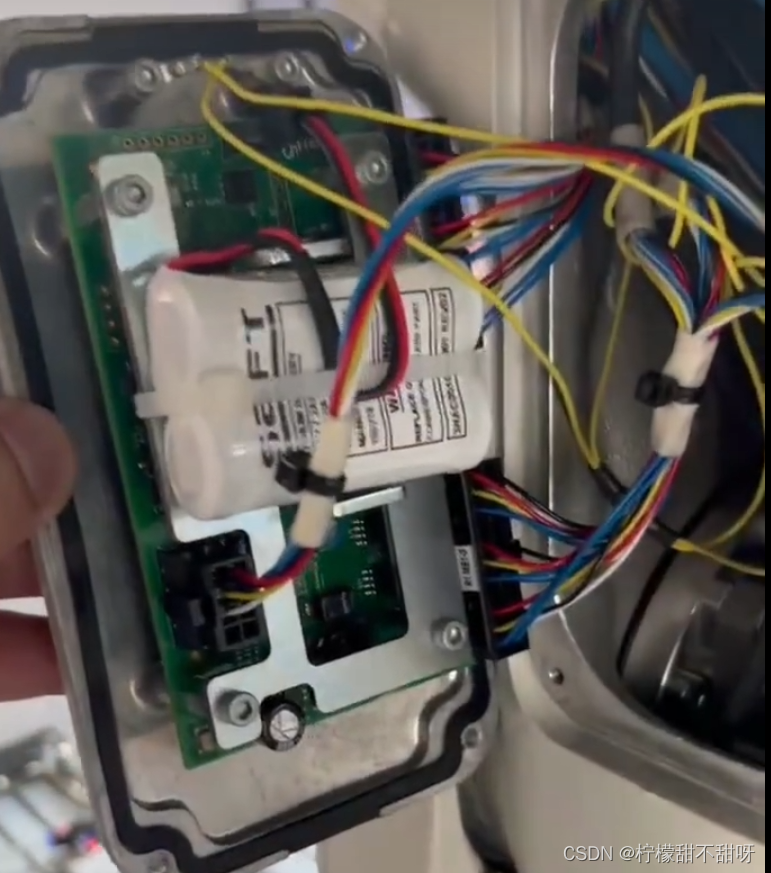
当机器人示教器报警提示,机器人电池电压过低时,需要及时跟换机器人编码器的电池。保证机器人零点位置不会因为机器人编码电池没电而丢失。一般来说,机器人的编码器电池的位置在机器人基座或者后臂附近。
二、机器人各轴回零
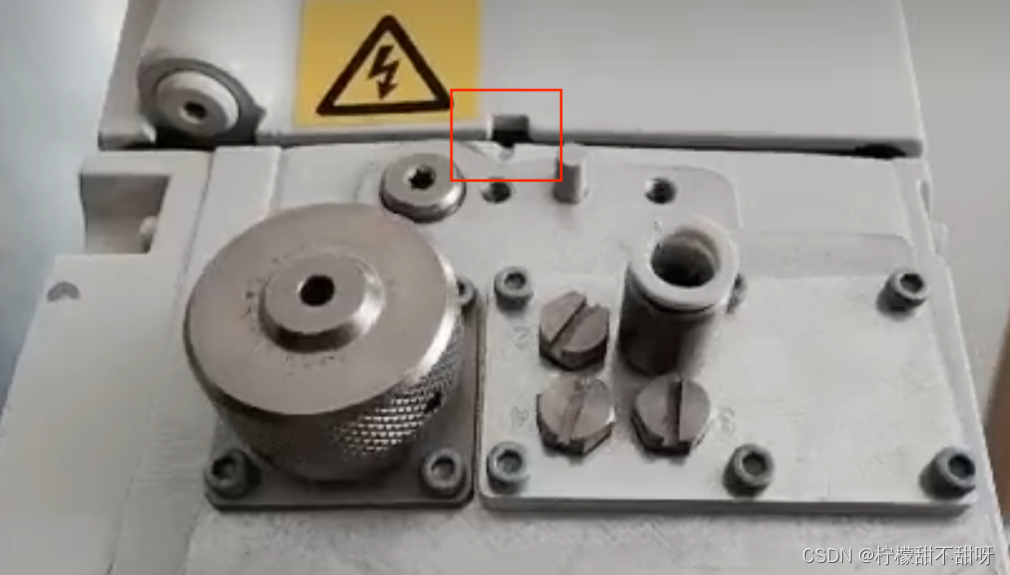
跟换完电池后,需要进行机器人的零点校准,进行零点校准之前需要把机器人各轴回零。按照先456轴,再123轴的原则对机器人零点的校准,将刻度线与凹槽对其。下图分别对应的是456123轴的零点刻度线位置:





三、转速计数器的更新
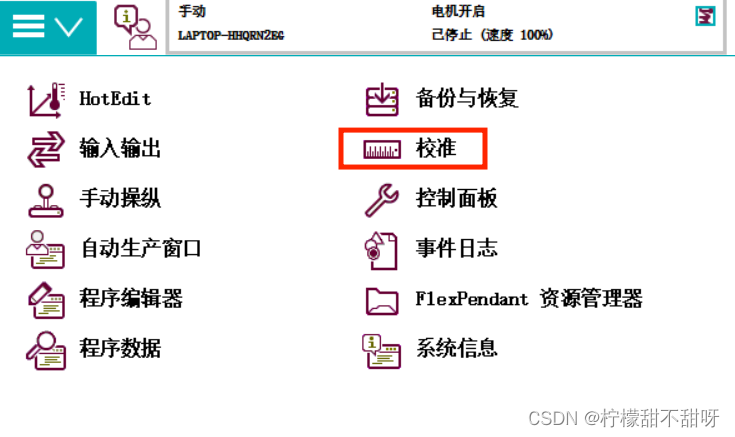
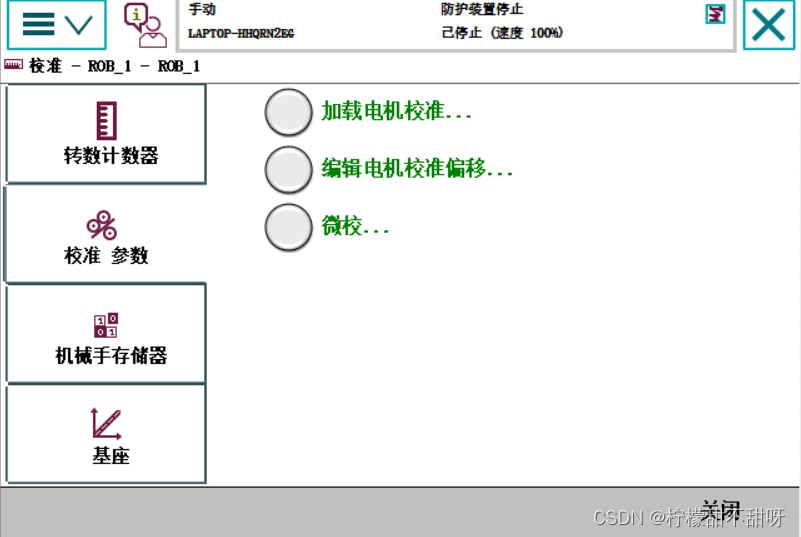
打开示教器的校准页面,对机器人转数计数器进行校准。
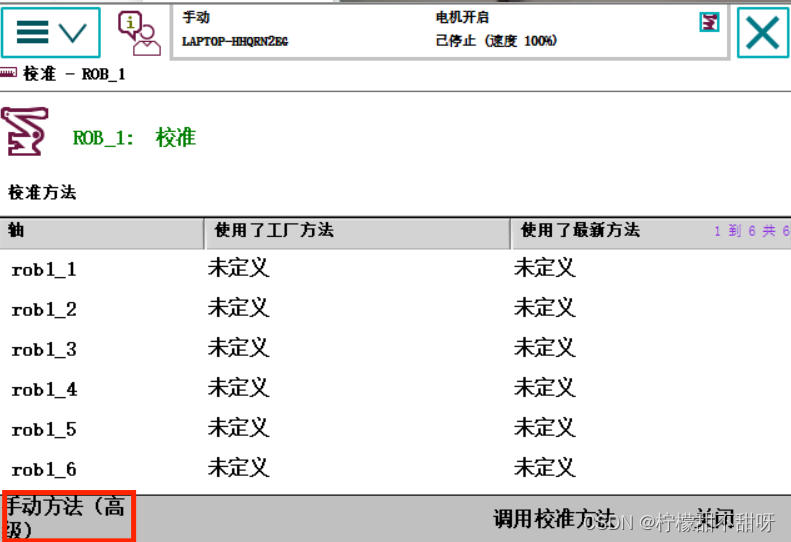
点击全选后,选中机器人6个轴状态,点击更新,更新时不能按使能键。


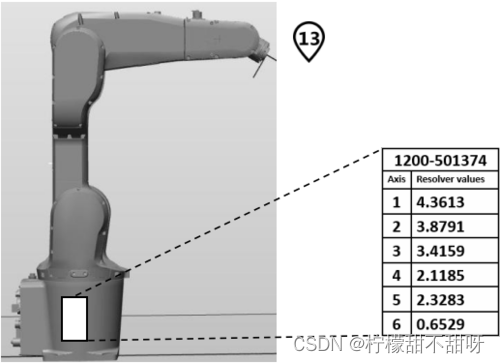
更新完成后选择校准偏移选项,选中编辑电机校准偏移选项。将示教器上的电机偏移值与机器人本体上的电机偏移值进行对照,机器人本体的电机偏移值位于机器人背后的标签上,如果数值没有差异就说明跟新无误。

这篇关于ABB机器人跟换编码器电池的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







