校正专题

OpenCV下的无标定校正(stereoRectifyUncalibrated)
OpenCV下的无标定校正(stereoRectifyUncalibrated) 文章目录 1. 杂话2. 无标定校正2.1 先看代码2.2 一点解释2.3 findFundamentalMat参数2.4 stereoRectifyUncalibrated参数 3. 矫正结果 1. 杂话 咱们在之前的帖子里面讲了一些比较常规的标定和校正OpenCV下的单目标定,双目标定与立体
Java五子棋之坐标校正
上篇针对了Java项目中的解构思维,在这篇内容中我们不妨从整体项目中拆解拿出一个非常重要的五子棋逻辑实现:坐标校正,我们如何使漫无目的鼠标点击变得有序化和可控化呢? 目录 一、从鼠标监听到获取坐标 1.MouseListener和MouseAdapter 2.mousePressed方法 二、坐标校正的具体实现方法 1.关于fillOval方法 2.坐标获取 3.坐标转换 4.坐
如何给MySQL设置远程访问?(官方校正版)
在现代数据驱动的世界中,数据库的灵活性和可访问性变得尤为重要。设置MySQL的远程访问不仅仅是为了方便,还为企业和开发者提供了多种优势。无论是在分布式团队协作、跨地域数据管理,还是在系统集成和实时数据访问方面,远程访问都能显著提升效率和生产力。 目录 1. 修改MySQL配置文件 2. 重启MySQL服务 3. 创建远程访问用户 4. 配置防火墙 a. 使用UFW(适用于Ubun

【MATLAB源码-第229期】基于matlab的有源功率因数校正仿真,采用PI调节改善功率因数;改善后达到99%.
操作环境: MATLAB 2022a 1、算法描述 一、整体结构概述 有源功率因数校正(APFC)是一种用于提高电力系统功率因数的技术,通过控制电流的波形,使其与电压的波形保持一致,从而减少无功功率的产生,提高系统的效率。该仿真模型采用PI调节器来实现功率因数的校正。以下将对图中各个模块和其连接进行详细描述。 二、输入电源部分 交流输入电压(Vg):这是系统的输入电源,通常为交流电源
双目立体视觉 I:标定和校正
点击上方“AI公园”,关注公众号,选择加“星标“或“置顶” 作者:Ali Yasin Eser 编译:ronghuaiyang 导读 双目立体校正和标定。 大家好!今天我们将讨论什么是立体摄像机,以及我们如何将它用于计算机视觉。通过使用这里的代码:https://github.com/aliyasineser/stereoDepth,我将解释我们如何为立体摄像机校准摄像机并计算视差图。我不
[C#]使用深度学习算法opencvsharp部署RecRecNet广角图像畸变矫正校正摄像广角镜头畸变图像
【论文地址】 https://arxiv.org/abs/2301.01661 【训练源码】 https://github.com/KangLiao929/RecRecNet 【参考源码】 https://github.com/hpc203/recrecnet-opencv-dnn 【算法介绍】 广角镜头在VR技术中显示出诱人的应用,但它会在捕获的图像中引入严重的径向失真。为了恢

核磁干货|SPM场图校正
大家好,我是茗创科技的Sheep 最近在分析核磁任务态数据 跟大家分享一下如何用SPM做场图校正 欢迎讨论~ SPM 场图校正 场图校正是指对成像进行静态和动态的畸变校正。 在SPM中做场图校正是通过FieldMap Toolbox 完成的。 它包括两个步骤: 1. Calculate,计算体素位移图(VDM) 2. Apply,使用VDM对成像进行校正 注:A v

高光谱图像聚类的像素-超像素对比学习与伪标签校正
Pixel-Superpixel Contrastive Learning and Pseudo-Label Correction for Hyperspectral Image Clustering 文章目录 Pixel-Superpixel Contrastive Learning and Pseudo-Label Correction for Hyperspectral Image

伽马校正技术在AI绘画中的作用
随着人工智能技术的飞速发展,AI绘画已经成为了艺术创作领域的一股新兴力量。在这个数字化时代,计算机图形学和机器学习的结合为我们带来了前所未有的创作工具。然而,为了实现更加真实和自然的色彩表现,伽马校正技术在其中扮演着至关重要的角色。本文将探讨伽马校正技术在AI绘画中的应用及其重要性。 首先,我们需要了解伽马校正的基本概念。伽马校正是一种非线性操作,用于调整图像的亮度或对比度,以补偿显示设备(如显
DxO ViewPoint v4.8 解锁版安装教程 (校正几何和透视的图像处理)
前言 DxO ViewPoint中文版是一款能够校正几何和透视的图像处理软件,摄影师通过ViewPoint破解版修复构图和光学缺陷并恢复拍摄对象平衡,重新调整如弯曲架构和扭曲图案等细节,让图像具备更强冲击力和更优平衡性。 一、下载地址 下载链接:http://dygod/source 点击搜索: DxO ViewPoint 二、安装步骤 1、解压文件,解压后如下,将ViewPointPo

求解常微分方程初值问题之多步Euler预报-校正法
//实现多步Euler法 #include <iostream> #include <math.h> #include <iomanip> using namespace std; class multi_euler { private: int i, n; double f, h, x, x_last, yc, yc_old, yp; public: double func(doub

用 OpenCV 实现图像中水平线检测与校正
前言 在本文中,我们将探讨如何使用 Python 和 OpenCV 库来检测图像中的水平线,并对图像进行旋转校正以使这些线条水平。这种技术可广泛应用于文档扫描、建筑摄影校正以及机器视觉中的各种场景。 环境准备 首先,确保您的环境中安装了 OpenCV 库。如果还没有安装,可以通过以下命令安装,要注意尽管代码里我们都是使用的cv2,但是安装包要选opencv-python: pip inst

GEE案例分析——Sentinel-1数据的地形校正和斑点滤波Lee-sigma
Lee-Sigma滤波 Lee-Sigma滤波是一种用于处理合成孔径雷达(SAR)图像中斑点噪声的算法。它基于Lee滤波器的原理,并引入了Sigma滤波器的概念,以改进对噪声的抑制效果,同时尽量保持图像的细节。下面是Lee-Sigma滤波的基本原理和步骤: 1. **基本原理**:Lee滤波器是一种自适应的统计滤波器,它利用图像中每个像素点周围邻域像素的统计信息来估计该像素点的噪声,并对其进行

GEE案例分析——利用双向反射分布函数(BRDF)Sentinel-2数据进行地形校正
双向反射分布函数 双向反射分布函数(Bidirectional Reflectance Distribution Function,简称BRDF)是遥感和计算机图形学中的一个重要概念,用于描述地表或任何表面对入射光的反射特性。BRDF 是一个定义良好的物理量,它量化了表面反射光的强度如何依赖于入射光的方向和观察者(或传感器)的观察方向。 以下是BRDF: 1. **定义**:BRDF 是一个

OpenCVForUnity 透视校正,透视变换
本文实现的效果是通过OpenCVForUnity实现透视图片校正,主要参考文章是点击打开链接 效果如下: OpenCVForUnity有封装好的计算透视变换矩阵的方法: public static Mat getPerspectiveTransform (Mat src, Mat dst) 和通过透视变换矩阵实现透视变换的方法: public static void w


测径仪测量偏差 标准棒校正步骤
关键字:测径仪测量偏差,测径仪测量不准,测径仪校准棒,测径仪校准步骤,测径仪标准棒, 测量偏差校验是需经常进行的一项工作。尤其是在更换不同直径的轧材或设备检修之后,定期或不定期进行。生产过程中,轧制不同规格的棒材建议用相应规格范围的标准棒进行校验。 将装有标准棒的校准支架从出钢方向插入测径仪的测量区,注意校准支架的端面与测径仪贴紧以保证标准棒不倾斜。 在测量软件中点击“系统参数—>数据校零”或
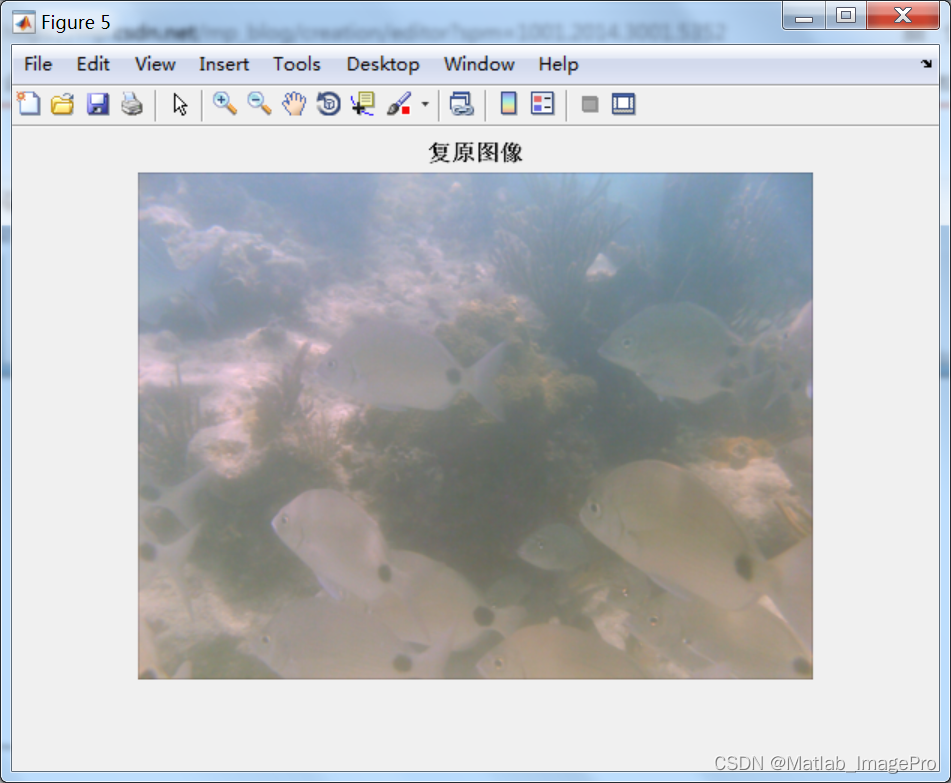
基于改进暗原色先验和颜色校正的水下图像增强,Matlab实现
博主简介: 专注、专一于Matlab图像处理学习、交流,matlab图像代码代做/项目合作可以联系(QQ:3249726188) 个人主页:Matlab_ImagePro-CSDN博客 原则:代码均由本人编写完成,非中介,提供有偿Matlab算法代码编程服务,不从事不违反涉及学术原则的事。 ~~~~~~~~~~~~~~~~~~~~~~~~~~~
计算机网络 2.4差错检验与校正
第四节 差错检验与校正 一、认识检验与校正 1.差错形成原因 内部因素(随机错):噪声脉冲、脉动噪声、衰减、延迟失真等。 外部因素(突发错):电磁干扰、太阳噪声、工业噪声等。 2.差错控制编码分类:检错码和纠错码。 3.常用方法:使用定比码、正反码、奇偶校验等。 二、常用校验方法 1.奇偶校验:是最简单的校验方法,在传输过程中使“1”的个数变为奇数或偶数。 2.循环冗余码

3D视觉(三):双目摄像头的标定与校正
3D视觉(三):双目摄像头的标定与校正 对于双目摄像头而言,除了需要分别标定左目摄像头的内参矩阵K1、畸变系数D1、右目摄像头的内参矩阵K2、畸变系数D2,还需要标定左右目对应的旋转矩阵R和平移向量T。当双目摄像头固定在一个平面上时,旋转矩阵R可近似为一个单位阵,平移向量T的欧式范数即为基线长度b。 我们可以把两个相机都看作针孔相机,它们是水平放置的,意味着两个相机的光圈中心都位于x轴上,两

3D视觉(二):单目摄像头的标定与校正
3D视觉(二):单目摄像头的标定与校正 文章目录 3D视觉(二):单目摄像头的标定与校正一、相机模型1、机器车坐标系到相机坐标系2、相机坐标系到归一化平面坐标系3、归一化平面坐标畸变4、归一化平面坐标系到像素坐标系二、单目摄像头标定三、实验结果四、源码五、相关链接 相机将三维世界中的坐标点(单位为米)映射到二维图像平面(单位为像素),这个过程可用针孔相机模型和透镜畸变模型来刻画
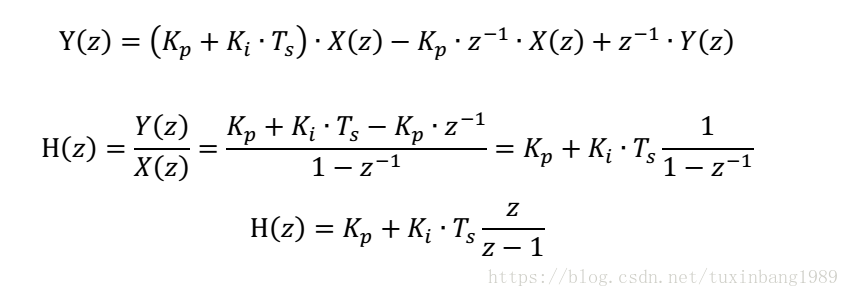
PI校正环节的程序实现推导过程
PI校正环节在经典控制论中非常有用,特别是对负反馈控制系统,基本上都有PI校正环节。 1.下面分别说明比例环节和积分环节的作用,以阶跃信号为例。 ①比例环节单独作用 以上分析说明,若只有比例环节的控制系统,阶跃响应也是一个阶跃信号,但会存在一定静差,且静差值随Kp增大而减小,但始终存在,不随时间变化。 输出的理论波形跟实际的数字控制输出波形会不一致。因为实际数字控制系统每隔一个计算

串联滞后校正及matlab实现
syms b_1Z=[];P=[0,-10,-5];K=1500;G_0=zpk(Z,P,K); %G_0为校正前系统开环传递函数[num,den]=tfdata(G_0);%求解b,T[Gm,Pm,wg_0,wc_0]=margin(G_0); %Pm为校正前的幅值裕度,gamma=60; %确定校正后的相角裕度Phi_c=-6; %校正后的截止频率下Gc(s)的相角,一般

车载摄像头畸变校正解决方案,打造无畸变高清视界
在车载摄像头日益普及的今天,摄像头图像的畸变问题成为了制约图像质量提升的一大瓶颈。畸变不仅影响画面的美观度,更关键的是它可能导致智能驾驶系统对环境的误判,进而威胁到行车安全。美摄科技凭借其在图像处理领域的深厚实力,推出了车载摄像头畸变校正解决方案,为车企提供了有效的解决方案。 美摄科技的车载摄像头畸变校正解决方案,直接对摄像头采集的画面进行畸变校正处理,消除四周的画面扭曲。该方案采用了先进的图像