张氏专题

经典干货|相机模型与张氏标定
视觉测量使用的日益广泛和频繁,对于基础知识的学习是掌握机器视觉的学习的关键;本文针对成像模型,坐标系转换和相机标定等知识进行简介。 虽然网上相关资料很多,但是本人在学习过程中同样为某些概念所困扰,写下学习总结一方面希望通过本文能为初学者解答相关概念,另一方面希望能够作为总结,加深自身印象。 文章包含 3 大部分,第一部分介绍相机成像模型,针对小孔成像原理和透视成像原理进行描述;第二部分介绍成像

4.相机标定——张氏标定原理(无畸变)
4.相机标定——张氏标定原理(无畸变) 1.相机标定:坐标系转换学习 2.相机的畸变介绍 3.相机标定原理(不考虑径向畸变) A Flexible New Technique for Camera Calibration 张氏标定论文原文 在第一篇博客中已经对坐标系转换做了详细介绍。在张氏标定原理中便不再介绍,直接使用其结论。请配合论文原文进行食用。 4.1坐标系转换回顾 [ P
智慧交通day03-车道线检测实现02-2:张氏标定法+双目标定
6.张氏标定法 张氏标定法是张正友博士在1999年发表在国际顶级会议ICCV上的论文《Flexible Camera Calibration By Viewing a Plane From Unknown Orientations》中,提出的一种利用平面棋盘格进行相机标定的实用方法。 该方法介于传统标定法和自标定法之间,既克服了传统标定法需要的高精度三维标定物的缺点,又解决了自标定法鲁

张氏标定法openCV实现单目相机
原理: 什么是相机标定的内外参: 一文带你搞懂相机内参外参(Intrinsics & Extrinsics) - 知乎Yanjie Ze, July 14 2021 摘要:本文介绍了相机的内参和外参以及推导过程,由三个部分组成:第一部分,相机内参; 第二部分,相机外参;第三部分,总结。 1 相机内参在左图中,我们把相机看作是针孔,现实世界中的…https://zhuanlan.zhihu.co

opencv-张氏标定法(中篇)
续上篇 原文链接如下: 从零开始学习「张氏相机标定法」(二)单应矩阵 从零开始学习「张氏相机标定法」(三)推导求解 当然还有玉米系列博客 标定在整个基于标定摄像机的三维重建的几何过程占有最重要最核心的地位。如下图: 从图中明显可以看出,标定得到的内参、外参和畸变系数,是双目视觉进行图片矫正,摄像机校正和3D恢复的基础。没有好的标定,双目视觉系统就无法完成3D重建。


【ZED】从零开始使用ZED相机(四):双目相机标定(MATLAB+张氏标定法)
引言 【ZED】从零开始使用ZED相机导航: 【ZED】从零开始使用ZED相机(一):windows下的安装配置与测试 【ZED】从零开始使用ZED相机(二):打开相机+捕获图像 【ZED】从零开始使用ZED相机(三):相机标定(张氏标定法) 上一篇博客介绍了利用ZED相机捕获棋盘格图像(仅保存左图),并利用一系列的.py脚本实现了单目相机的标定,那么如何实现双目相机的标定?目前matlab软件
【MQ笔记】张氏标定法学习笔记:A Flexible New Technique for Camera Calibration详解
张定友教授于2000年发表在 IEEE TRANSACTIONS ANALYSIS AND MACHINE INTELLIGENCE 上的论文 A Flexible New Technique for Camera Calibration 中提出了著名的张氏标定法,该方法现在已经成为机器视觉领域的重要基础。虽然现在已经有很多成熟的函数或程序可以非常便捷的实现相机标定,但是吃透相关内容对理解相机矫
相机标定基础原理详解(张氏标定)
浏览微信公众号看见这篇文章,写的很好,特转载下来,方便其他同学学习,也方便以后复习!微信公众号名字:计算机视觉life 【WHO:张氏标定法发明人】 先来简单介绍一下我们的主角:张正友博士。他是世界著名的计算机视觉和多媒体技术的专家,ACM Fellow,IEEE Fellow。现任微软研究院视觉技术组高级研究员。他在立体视觉、三维重建、运动分析

相机内参标定和畸变校正以及张氏标定法
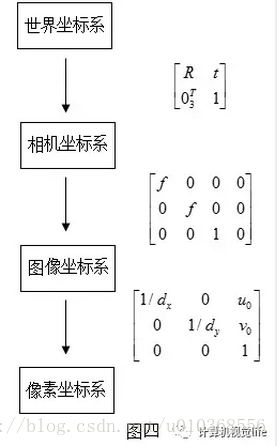
一些坐标系 世界坐标系:是一个假想的坐标系,用作一般参考,可根据需要自由定义。 在我们的双目相对位姿测量系统中,世界坐标系一般定义与左相机的摄像机坐标系重合,这样的话左相机的R为单位矩阵,T为零向量。双目视觉中一般将世界坐标系原点定在左相机或者右相机或者二者X轴方向的中点。 相机标定 对于N张无畸变的图像来说,共有4个内参+6N个外参来标定,每张棋盘

手把手教你OpenCV利用张氏标定法进行相机标定(二)
由于刚到德国,办手续、买东西花了快一周的时间,今天刚有课余闲暇时间,就赶紧接着上一讲继续写。 在上一讲 手把手教你OpenCV利用张氏标定法进行相机标定(一)中,我们完成了标定板的制作,得到了不同相机位姿下的标定板图片。这一讲中,我们将利用强大的图像处理工具——OpenCV,教大家如何进行相机的标定。 1.函数介绍 张氏相机标定法简便易用且精度较高,因此相关的数学基础早已被转化为程序封装在了O

从零学习张氏相机标定法1
先来简单介绍一下我们的主角:张正友博士。他是世界著名的计算机视觉和多媒体技术的专家,ACM Fellow,IEEE Fellow。现任微软研究院视觉技术组高级研究员。他在立体视觉、三维重建、运动分析、图像配准、摄像机标定等方面都有开创性的贡献。 张氏标定法, 是张正友博士在1999年发表在国际顶级会议ICCV上的论文《Flexible Camera Calibration By Viewing

【转载】从零开始学习「张氏相机标定法」
【WHO:张氏标定法发明人】 先来简单介绍一下我们的主角:张正友博士。他是世界著名的计算机视觉和多媒体技术的专家,ACM Fellow,IEEE Fellow。现任微软研究院视觉技术组高级研究员。他在立体视觉、三维重建、运动分析、图像配准、摄像机标定等方面都有开创性的贡献。 「张氏标定法」是张正友博士在1999年发表在国际顶级会议ICCV上的论文《Flexible Camera Cal