本文主要是介绍【ZED】从零开始使用ZED相机(四):双目相机标定(MATLAB+张氏标定法),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
引言
【ZED】从零开始使用ZED相机导航:
【ZED】从零开始使用ZED相机(一):windows下的安装配置与测试
【ZED】从零开始使用ZED相机(二):打开相机+捕获图像
【ZED】从零开始使用ZED相机(三):相机标定(张氏标定法)
上一篇博客介绍了利用ZED相机捕获棋盘格图像(仅保存左图),并利用一系列的.py脚本实现了单目相机的标定,那么如何实现双目相机的标定?目前matlab软件就有现成的双目相机的标定方法,在自定义.py脚本实现双目标定之前(其实目前笔者还未实现)不妨先试试现有的标定软件(如果比较着急用的话)
1 安装MATLAB
MATLAB是一款商业数学软件,用于算法开发、数据可视化、数据分析以及数值计算的高级技术计算语言和交互式环境,主要包括MATLAB和Simulink两大部分,可以进行矩阵运算、绘制函数和数据、实现算法、创建用户界面、连接其他编程语言的程序等,主要应用于工程计算、控制设计、信号处理与通讯、图像处理、信号检测、金融建模设计与分析等领域。
直接附上安装的参考链接:https://mp.weixin.qq.com/s/LAatgqNf55zpxzOYlpn8fg

2 获取双目的棋盘格图像
这里笔者分享下标定图像,简单的直接打印棋盘格图像(如果需要更高的精度可能需要购买或者定制标定板)
链接:https://pan.baidu.com/s/199uPaKDCptc4rgG1wIg-wg?pwd=lian
提取码:lian
利用ZED的SDK以及自定的代码实现双目图像的捕获(代码和上篇博客基本一致,些许修改)
"""
2022.02.02
author:alian
ZED相机的二次开发:双目相机标定
"""
import pyzed.sl as sl
import cv2
import numpy as npclass CameraZed2:def __init__(self,resolution=None,fps=30,depthMode = None):self.zed = sl.Camera()self.input_type = sl.InputType()self.init_params = sl.InitParameters(input_t=self.input_type)# 设置分辨率if resolution == "2K":self.init_params.camera_resolution = sl.RESOLUTION.HD2Kelif resolution == "1080":self.init_params.camera_resolution = sl.RESOLUTION.HD1080else: # 默认self.init_params.camera_resolution = sl.RESOLUTION.HD720self.init_params.camera_fps = fps # 设置帧率# 设置获取深度信息的模式if depthMode == "PERFORMANCE":self.init_params.depth_mode = sl.DEPTH_MODE.PERFORMANCEelif depthMode == "QUALITY":self.init_params.depth_mode = sl.DEPTH_MODE.QUALITYelse:self.init_params.depth_mode = sl.DEPTH_MODE.ULTRAself.init_params.coordinate_units = sl.UNIT.MILLIMETER # 单位毫米# 打开相机err = self.zed.open(self.init_params)if err != sl.ERROR_CODE.SUCCESS:print(repr(err))self.zed.close()exit(1)self.runtime = sl.RuntimeParameters()self.runtime.sensing_mode = sl.SENSING_MODE.STANDARDself.savepath = '' # 标定图像保存的路径def grab_imgs(self): # 捕获左右图像用于相机标定(文件夹自动创建)img_l = sl.Mat()img_r = sl.Mat()num = 0# 自动创建保存文件夹(分别存放左图和右图)import timename = time.strftime("%Y-%m-%d-%H-%M", time.localtime())self.savepath_L = './images/%s/L' % nameself.savepath_R = './images/%s/R' % nameos.makedirs(self.savepath_L,exist_ok=True)os.makedirs(self.savepath_R,exist_ok=True)while True:if self.zed.grab(self.runtime) == sl.ERROR_CODE.SUCCESS:self.zed.retrieve_image(img_l,sl.VIEW.LEFT)self.img_l = img_l.get_data()self.zed.retrieve_image(img_r,sl.VIEW.RIGHT)self.img_r = img_r.get_data()view = np.concatenate((self.img_l,self.img_r),axis=1)cv2.imshow('View',cv2.resize(view,(1920,540)))key = cv2.waitKey(1)if key & 0xFF == ord('s'): # 按S同时保存左右图像savePath_L = os.path.join(self.savepath_L, "L{:0>3d}.png".format(num))print(savePath_L)cv2.imwrite(savePath_L, self.img_l)savePath_R = os.path.join(self.savepath_R, "R{:0>3d}.png".format(num))cv2.imwrite(savePath_R, self.img_r)num +=1if key & 0xFF == 27: # 按esc退出视图窗口break
调用函数:
if __name__ == "__main__":cam = CameraZed2(resolution='1080',fps=30)cam.grab_imgs() # 获取标定图像(左、右图)

3 开始标定
首先打开MATLAB双目标定工具

分别选择左右图所在文件夹


进行角点检测
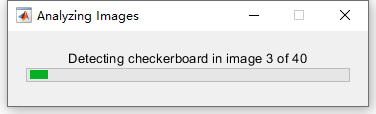

显示角点检测的结果

点击校正后显示如下:

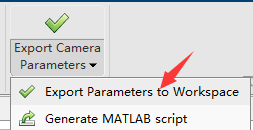
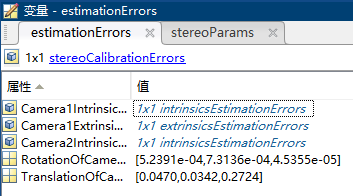
导出校正后的参数:
在MATLAB主界面显示如下:

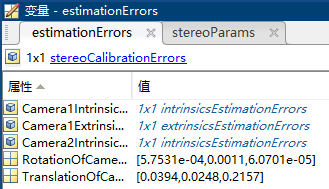

如上得到相机标定的参数,但是此次标定还是比较粗略的,笔者尝试几种不同的拍摄角度(固定相机,改变标定板的位姿),得到的标定误差都不一样,因此是否有更好的拍摄位姿?还需进一步研究。
4 标定板的尝试
打印的标定板用于测试还尚可,但是要获得准确的相机内外参数就远远不够了。实现高精度的标定板需要能够防止外界关对相机成像的影响,导致成像结果照片变黑或者反光,因此带有光源的背光板是最好的选择,打印上定制的棋盘格图案,但是越好的标定板也越贵,如铝基板一块可能就得上千了,
带有光源的背光板?ipad是不是可以作为显示棋盘格的背光板呢?并且还自带光源。于是笔者如下尝试如下:

需要注意的是,要先测量好单元格的尺寸,笔者测量的尺寸是20mm,接着按照上述的步骤进行标定,获得结果如下:


综上,利用MATLAB标定工具实现了双目相机的粗略标定,更加高精度的标定还需进一步研究。
这篇关于【ZED】从零开始使用ZED相机(四):双目相机标定(MATLAB+张氏标定法)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




