zed专题

探索 Zed 编辑器:速度与协作的巅峰之作
Zed 是一款备受瞩目的代码编辑器,专为现代开发者打造。本文将深入介绍 Zed 的独特优势,以及如何快速上手使用这款编辑器,助你在编程工作中大幅提升效率。 一:Zed 编辑器的优势 Zed 是近年来崭露头角的一款代码编辑器,迅速赢得了众多开发者的青睐。以下是 Zed 的几大核心优势: 1. 极速响应 Zed 以其卓越的性能著称,采用了先进的技术栈,确保编辑器即使在处理大型项目时,依然能

将ZED获取的视频格式svo转换成其他格式
引言 svo视频格式是ZED的专属格式,实际应用中我们需要将该格式转化成其他可读的文件格式。 1 安装ZED-SDK 双击打开ZED的视频转化执行文件 "C:\Program Files (x86)\ZED SDK\samples\bin\ZED_SVO_Export.exe" 打开如下所示: 根据上述指示执行转换命令,官网也有详细的视频转化教程(zed官网): 笔者这里将官
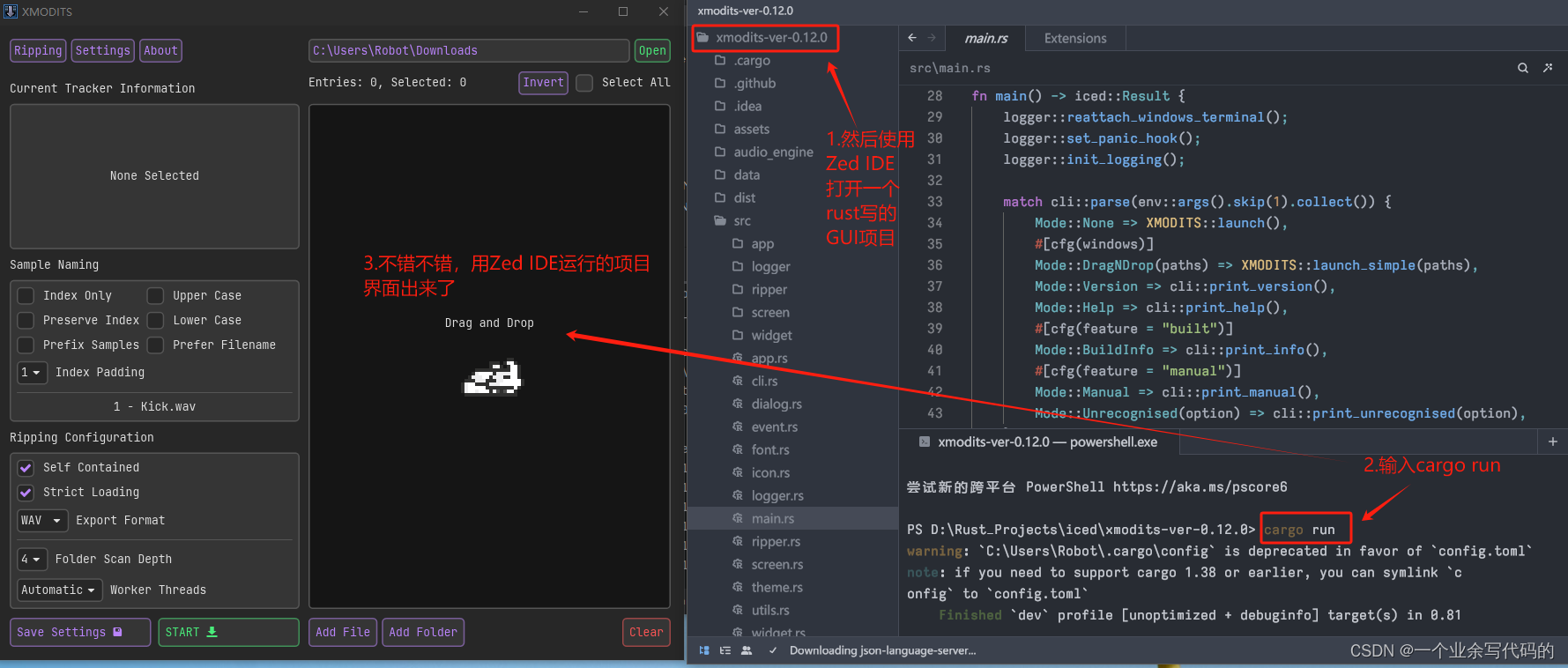
编译一个叫:未来的IDE-Zed编辑器(Windows平台)
一、前言 截止到2024-6-15,Zed官方并未给出Windows的二进制安装包,如果想在Windows平台使用的话需要自己编译,我是如何编译的请随我道来,有兴趣的码友可以尝试下,在下可不敢保证各位码友按我这方法能100%编译出来,得根据自己的平台环境而定了。 二、尬诗搞事情,开干 1.编译环境 (1)rust-1.79.0版本 (2)RustRover-2024.1.2版本 2.安
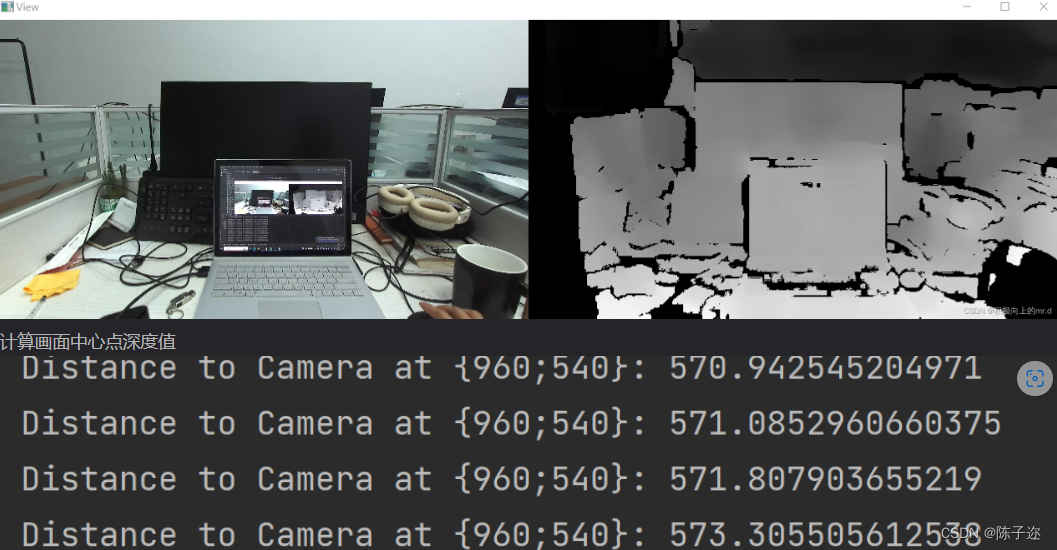
使用Zed 实现测距
目录 1. 导入相关库 2. 相机初始化设置 3. 获取中心点深度数据 4. 计算中心点深度值 5. 完整代码 此代码基于官方代码基础上进行改写,主要是获取zed相机深度画面中心点的深度值,为yolo测距打基础。 Zed相机是由Stereolabs公司开发的一种先进的立体视觉相机。这种相机专为计算机视觉和机器学习应用而设计,能够提供高质量的3D捕捉和分析功能。以下是Ze
Zed,有望打败 VS Code 吗?
大家好,我是楷鹏。 先说结论,不行。 Zed,又一款新起的文本代码编辑器 👉 https://zed.dev 今年一月二十四号正式开源,短短不到三个月,GitHub 上已经冲上 3 万 star 正如 Zed 的口号所说「Code at the speed of thought 以思考的速度编码」 实际体验下来,Zed 确实会比 VS Code 丝滑 ⬇️ Zed

yolov5调用zed相机实现三维社交距离检测(单类别)
yolov5调用zed相机实现单类别三维社交距离检测(python) 1. 相关配置2. 相关代码2.1 测距代码2.2 不同类别社交距离检测2.3 主代码zed_distance.py 3. 实验结果4. 源码下载 相关链接 此项目直接调用zed相机实现三维测距,无需标定,相关内容如下: 1. yolov4直接调用zed相机实现三维测距 2. yolov7直接调用zed相机实现三
yolov7直接调用zed相机实现三维测距(python)
yolov7直接调用zed相机实现三维测距(python) 1. 相关配置2. 相关代码3. 源码下载 相关链接 此项目直接调用zed相机实现三维测距,无需标定,相关内容如下: 1. yolov4直接调用zed相机实现三维测距 2.yolov5直接调用zed相机实现三维测距(python) 3. yolov8直接调用zed相机实现三维测距(python) 4. yolov9直接调

【ZED】从零开始使用ZED相机(四):双目相机标定(MATLAB+张氏标定法)
引言 【ZED】从零开始使用ZED相机导航: 【ZED】从零开始使用ZED相机(一):windows下的安装配置与测试 【ZED】从零开始使用ZED相机(二):打开相机+捕获图像 【ZED】从零开始使用ZED相机(三):相机标定(张氏标定法) 上一篇博客介绍了利用ZED相机捕获棋盘格图像(仅保存左图),并利用一系列的.py脚本实现了单目相机的标定,那么如何实现双目相机的标定?目前matlab软件

ZED Board从入门到精通系列(八)——Vivado HLS实现矩阵相乘
转载地址:http://blog.csdn.net/kkk584520/article/details/18812321 HLS的学习资源可以参考http://xilinx.eetrend.com/article/5096。本节给出较为通用的矩阵与向量相乘例子,从全串行到全并行进行了一步步优化实现。 矩阵实验室Matlab是比较常用的数学仿真软件。本博主用的是R2013a版本。为了验证矩阵
Zed的强大的调试宏
#为什么需要错误处理 大多数程序员假定错误不会发生,并且这一乐观的思想影响了他们所用和创造的语言。 C通过返回错误码或设置全局的errno值来解决这些问题,并且你需要检查这些值。 通过这种机制检查现存的复杂代码中,你所执行的东西是否发生错误。模式如下 调用函数如果返回值出现错误(每次必须检查)清理创建的所有资源打印出所有可能有帮助的错误信息 接下来将专注于这些步骤的实现 实现错误

视觉SLAM方案整理及摄像头选型调研(他首推ZED)
他首推ZED,让我想起李ji也是用的ZED 摘自:https://mp.weixin.qq.com/s/BHFxSbGab_TVr_PxG17VaA 视觉SLAM方案整理及硬件选型调研 新机器视觉 7月26日 c 目前个人初步接触视觉SLAM开发相关工作,现在就相关学习做一些总结以加深个人理解,同时也希望能给其他网友提供一些帮助。这篇文章主要是对之前关于视觉SLAM方案和硬件选型
ubuntu 18.04的环境配置和ZED-YOLO配置
1 配置软件源 使用software and updates 2 安装NVIDIA驱动,版本440.59,这个要提前查清楚,我的和系统内核还相关的,我的Linux内核是5.4 https://www.cnblogs.com/fanminhao/p/8902296.html https://www.nvidia.cn/geforce/drivers/ https://www.nvidia.cn/Do
zed-yolo编译 error: ‘CUDNN_CONVOLUTION FWD_PREFER_FASTEST’ undeclared
使用的cudnn版本太高,zed-yolo支持的cudnn版本为v3-v7。 This repository supports:* both Windows and Linux* both OpenCV 2.x.x and OpenCV <= 3.4.0 (3.4.1 and higher isn't supported)* both cuDNN v5-v7* CUDA >= 7.5*

解决ZED SDK安装后不可用,出现“核心已转储”的闪退问题
在陈述问题简单回顾下ZED SDK安装的步骤 ZED的运行需要显卡支持,cuda加速,因此需要提前安装好显卡驱动以及对应的cuda和cudnn,基础工作在此不再赘述,以下步骤默认已经完成上述准备工作。 建议新建一个虚拟环境以限定ZED使用的python环境,终端执行:conda create -n zed python=3.8 ZED SDK下载 下载链接:ZED SDK(需墙科学上网,如果
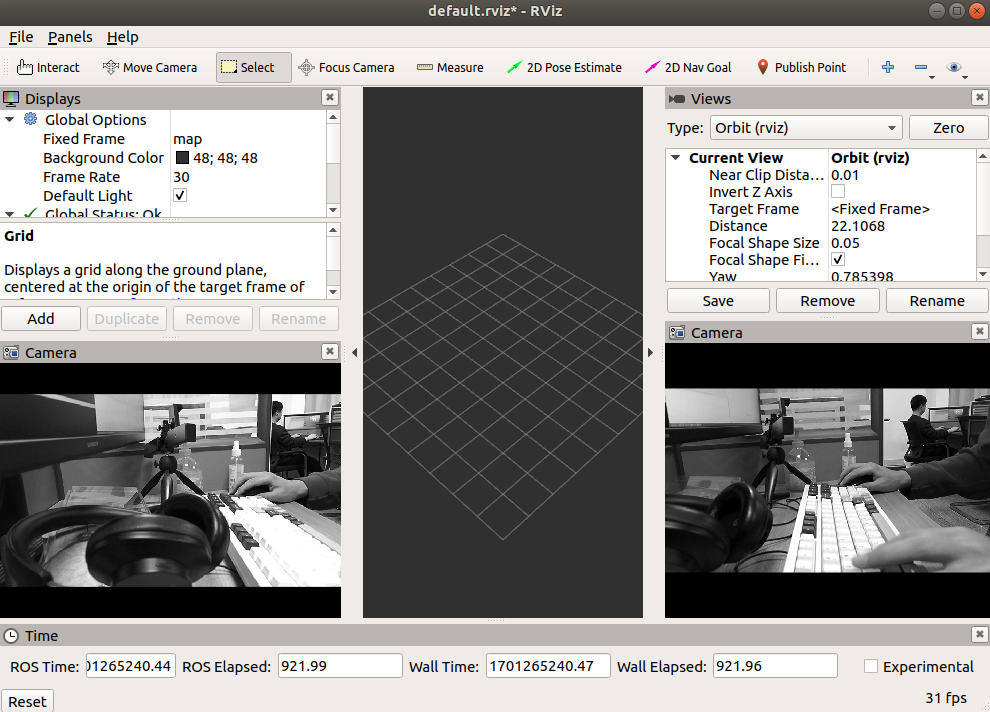
【ZEDSLAM】Ubuntu18.04系统ZED 2i双目相机SDK安装、联合标定、SLAM测试
0.设备、环境和说明 笔记本电脑i5-8300H、GTX 1060、32GRAM 因为后面要测试Vins-Fusion和ORB-SLAM3,所以推荐安装Ubuntu 18.04(或者Ubuntu 20.04) + ROS 1(不建议用比Ubuntu18更低的版本) ROS一键安装命令: wget http://fishros.com/install -O fishros && . fishro

Unity+C#+ZED相机——获取矩阵格式的点云数据
文章目录 Unity+C#+ZED相机——获取矩阵格式的点云数据引言基础环境程序代码 Unity+C#+ZED相机——获取矩阵格式的点云数据 引言 上礼拜把ZED-UNITY插件的原生接口的代码和核心的脚本看了一遍。有了比较系统的了解,里面的注释用插件翻译了一下,自己校正了,并把中文附带在脚本注释里面了,同时把自己经过思考或者搜索资料才整明白的知识点,代码关系也注释在相应的地
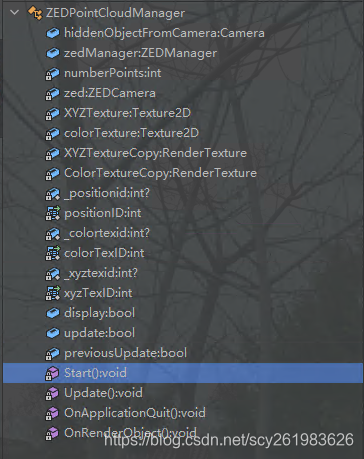
Zed-Unity插件代码注释——ZEDPointCloudManager.cs——点云显示
文章目录 Zed-Unity插件代码注释——ZEDPointCloudManager.cs引言基础环境ZEDPointCloudManager.cs脚本介绍代码(注释后) Zed-Unity插件代码注释——ZEDPointCloudManager.cs 引言 由于项目的需求,需要在混合现实里面获得现实世界中一些物品的位置。ZED相机的双目相机提供了点云的数据,因此自己需要在u

Zed-Unity插件代码注释——ZEDLayersManager.cs
文章目录 Zed-Unity插件代码注释——ZEDLayersManager.cs引言基础环境ZEDLayersManager.cs脚本介绍代码(注释后) Zed-Unity插件代码注释——ZEDLayersManager.cs 引言 略(2020-09-01 15.50) 基础环境 略(2020-09-01 15.58) ZEDLayersManager.cs脚本介绍
vs2019 基于pcl和opencv的体积检测算法 zed版本+安卓端新手版(一)
vs2019 基于pcl和opencv的体积检测算法 zed版本+安卓端新手版(一) 写在前面的话配置环境配置代码 写在前面的话 最近的一个小项目,图像方面的算法开发,题目是:深度相机体积测量算法,最终目标是用在安卓端做体积测量,给快递公司用。体积检测算法的源码是参考PointCloudVolumeMeasure的,使用俯拍的方式进行得到物体的长宽高进行估计的,所以如果是测没有长