本文主要是介绍Unity+C#+ZED相机——获取矩阵格式的点云数据,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
文章目录
- Unity+C#+ZED相机——获取矩阵格式的点云数据
- 引言
- 基础环境
- 程序代码
Unity+C#+ZED相机——获取矩阵格式的点云数据
引言
上礼拜把ZED-UNITY插件的原生接口的代码和核心的脚本看了一遍。有了比较系统的了解,里面的注释用插件翻译了一下,自己校正了,并把中文附带在脚本注释里面了,同时把自己经过思考或者搜索资料才整明白的知识点,代码关系也注释在相应的地方。 对于自己不懂的函数,Unity的相关概念,也把自己查找到的博客资料,官网说明的网站链接直接放在代码的附近,可以直接点进去网站查看。
在前面一篇文章中,我对插件中对点云数据的显示案例进行了注释。 ZED插件在Unity中很少提到类似RGB图像、Pointcloud这种概念,而是根据Unity的习惯,把RGB图像和Depth图像称为图像型的纹理(texture_image type),把点云数据,深度数据称为测量型纹理(texture measure type ),这也是我为什么我刚开始接触这个插件的时候误以为没有提供接口,而去配置了C#与ZED-SDK的接口。 在插件的示例中都是把这两种数据直接与纹理对象捆绑在一起,不能像操作矩阵一样对其中的数据进行操作。(也有可能是我对Unity还不熟悉)
所以这篇主要记录一下如何在Unity中用ZED插件提供的矩阵数据类型存储点云数据。图像数据是类似的。
基础环境
操作系统:win10专业版
ZED相机型号:zed-mini
ZED SDK:3.1版本(插件目前只支持3.1版本)
ZED-Unity插件:3.1版本
Unity版本:2019
C#版本:8.0
编辑器:Rider
程序代码
-
要获得这个数据的关键在于调用ZEDCamera.cs的函数 RetrieveMeasure。如下图,
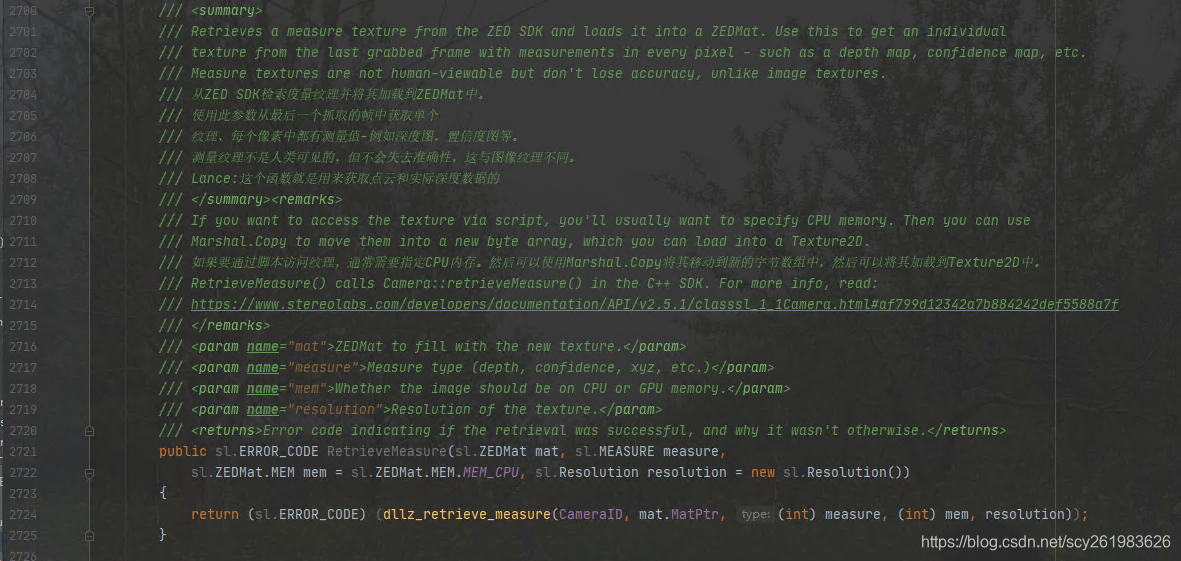
这个函数里面封装了一个.dll的外部声明的函数,这个函数是底层SDK定义的,用于读取相机的measure类型的数据。 -
脚本名称: MyPointCloudFromZED.cs
-
代码
/*
*FileName: MyPointCloudFromZED.cs
*Author: Lance
*UnityVersion:2019.4.4f1
*Date: 2020-09-02
*Connect: 261983626
*Description: ** 应用对象:任意* 生命周期:在ZED准备好后* 脚本功能:获取ZED相机中的点云数据* 依赖对象:* 1、组件:ZEDManager.cs,如果不需要用这个相机实现透视功能,可以挂在其他的空对象上* 2、类文件:ZEDCommon.cs类文件 主要是一些功能函数ZEDCamera.cs类文件 主要是相机的对象ZEDMat.cs类文件 主要是数据类型* 备注说明:ZEDManager已经帮我们做好了大量的相机管理工作,我们只需要在这里面实现几个函数的调用即可
*
*History:* 2020-09-02: *
*/using System.Collections;
using System.Collections.Generic;
using sl;
using UnityEngine;/// <summary>
/// 获得ZED相机的点云
/// </summary>
public class MyPointCloudFromZED : MonoBehaviour
{[Header("点云数据获取")] public string Header;/// <summary>/// 点云数据矩阵/// </summary>private sl.ZEDMat myPointCloud; //定义点云矩阵/// <summary>/// 图像数据矩阵/// </summary>private sl.ZEDMat myRgbImage; //定义图像矩阵/// <summary>/// Instance of the ZEDManager interface/// ZEDManager界面的实例,后面应该是要将外部的ZedManager赋值给下面这个变量才对/// </summary>public ZEDManager zedManager = null;/// <summary>/// 相机的分辨率/// </summary>private sl.Resolution resolution;/// <summary>/// zed Camera controller by zedManager/// zedManager的zed相机控制器/// </summary>private sl.ZEDCamera zed = null;/// <summary>/// 是否更新数据/// </summary>public bool update = true; //暂时没用上/// <summary>/// 前一次update的状态/// </summary>private bool previousUpdate = true; //暂时没用上/// <summary>/// 某个值/// </summary>private float4 onePointCloud; //定义某个接收单个点数据的变量void Start(){if (zedManager == null) //如果还没有实例化{zedManager = FindObjectOfType<ZEDManager>(); //找到ZEDManager组件if (ZEDManager.GetInstances().Count > 1 //如果这个组件的实例化不只一个,我的情况一般只有一个) //We chose a ZED arbitrarily, but there are multiple cams present. Warn the user. 我们任意选择一个ZED,但是有多个相机存在。所以需要警告用户。{Debug.Log("Warning: " + gameObject.name +"'s zedManager was not specified, so the first available ZEDManager instance was " +"assigned. However, there are multiple ZEDManager's in the scene. It's recommended to specify which ZEDManager you want to " +"use to display a point cloud.");}}if (zedManager != null) //实例化后的zed = zedManager.zedCamera; //相机设备赋值myPointCloud = new ZEDMat(); //实例化矩阵,内部获得指针,myRgbImage = new ZEDMat(); //实例化矩阵,内部获得指针onePointCloud = new float4();resolution = new sl.Resolution((uint) zed.ImageWidth, (uint) zed.ImageHeight); //设置图像分辨率myPointCloud.Create(resolution, ZEDMat.MAT_TYPE.MAT_32F_C4); //分配指定的大小和类型的数据内存myRgbImage.Create(resolution, ZEDMat.MAT_TYPE.MAT_8U_C3); //分配指定的大小和类型的数据内存}// Update is called once per framevoid Update(){//Don't do anything unless the ZED has been initialized.// 除非ZED已初始化,否则请勿执行任何操作。if (zed.IsCameraReady){ERROR_CODE getPointCloudResult = zed.RetrieveMeasure(myPointCloud, MEASURE.XYZ); //返回注册点云数据的结果if (getPointCloudResult == ERROR_CODE.SUCCESS) //如果获得矩阵数据成功的话{myPointCloud.GetValue(400, 400, out float4 point, ZEDMat.MEM.MEM_CPU); // 从矩阵中取出某个像素点的点云数据, 这边指定从cpu内存中获得onePointCloud = point; //输出点云数据值 print("x:"+onePointCloud.r.ToString()+"y:"+onePointCloud.g.ToString()+"z:"+onePointCloud.b);}}}
}
- 运行结果

这篇关于Unity+C#+ZED相机——获取矩阵格式的点云数据的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!



