mpc专题

Matlab实现MPC算法
模型预测控制(Model Predictive Control, MPC)是一种先进的过程控制方法,它使用模型来预测系统未来的行为,并基于这些预测来优化控制动作。在Matlab中实现MPC算法通常涉及到使用Matlab的MPC Toolbox,我们可以考虑一个线性时不变系统的简化版本。 以下是一个简单的MPC算法实现,用于控制一个线性系统,使其状态达到期望的设定点。我们将使用一个简单的线性系统模

笔记100:使用 OSQP-Eigen 对 MPC 进行求解的方法与代码
1. 前言: 我们在对系统进行建模的时候,为了减少计算量,一般都将系统简化为线性的,系统如果有约束,也是将约束简化为线性的; 因此本篇博客只针对两种常见系统模型的 MPC 问题进行求解: 线性系统 + 无约束线性系统 + 线性约束 a a a a 2. 线性系统 + 无约束的 MPC 问题求解 目前已知: 目标(代价)函数: 矩阵 ,, 均为正定矩阵;线性系统状态空
第5章:模型预测控制(MPC)
5.1 模型预测控制(Model Predictive Controller -- MPC) 注:MPC 更像是一种控制策略的框架,它使用了最优的控制思想在里面,如下的几种控制策略其实都是 MPC 的变体; MHC(Moving Horizon Control):滚动时域控制RHC(Receding Horizon Control):后退时域控制DMC(Dynamical Matrix Con
MPC+WBC多任务优先级控制例子
MPC+WBC多任务优先级控制例子 将模型预测控制(Model Predictive Control, MPC)与全身控制(Whole-Body Control, WBC)结合应用于人形机器人是一项复杂的任务,但它可以显著提高机器人在动态环境中的表现。在实际的全身控制(Whole-Body Control, WBC)中,多个任务的优先级可以通过将这些任务分层次处理来实现。高优先级任务会在主空间中

3、你真的把MPC搞懂了吗
MPC是模型预测控制(Model Predictive Control)的缩写,也叫做滚动时域控制(receding horizon control)。在机器人领域,MPC主要应用于运动控制和路径规划、轨迹跟踪。 一、组成部分: 1、模型:要解决问题的对象所在领域的模型,数学上表现为问题对象的状态和输入控制量。以小车轨迹跟踪为例,包括小车的位置、方向,控制小车

MPC的横向控制与算法仿真实现
文章目录 1. 引言2. 模型预测控制(MPC)2.1 基础知识2.2 MPC的整体流程2.3 MPC的设计求解 3. 车辆运动学MPC设计4. 算法和仿真实现 1. 引言 随着智能交通系统和自动驾驶技术的发展,车辆的横向控制成为了研究的热点。横向控制指的是对车辆在行驶过程中的水平运动进行控制,包括车辆的转向、车道保持、避障等。这些控制任务对于提高道路安全性、减少交通事故、提升

模型预测控制MPC(1)—— 基础概念
文章目录 1. 历史沿革1.1 控制论1.2 最优控制与强化学习 2. 模型预测控制 1. 历史沿革 我本科做机器人的时候接触过一点控制,主要做了大量 PID 在嵌入式控制系统的应用;硕士期间研究方向是强化学习。在我调研 MPC 的过程中,发现它同时出现在最优控制和强化两个领域的教程中(好像更偏控制一点)。为了更好地理解这些方法在 big picture 中的定位,稍微梳理一下这

基于MPC的自动驾驶泊车控制
基于MPC的自动驾驶泊车控制 H. Ye, H. Jiang, S. Ma, B. Tang, and L. Wahab, “Linear model predictive control of automatic parking path tracking with soft constraints,” International Journal of Advanced Robotic Sys

MPC模型预测控制(四)-MATLAB跟踪圆
参考https://github.com/Janani-Mohan %% YALMIP : Circular Trajectory Tracking using MPC clc;clear;close all;yalmip('clear')%% MPC Parameters definition% Model Parametersparams.Ts = 0.01; % Sampl
MPC模型预测控制(二)-MATLAB代码实现
update:MPC的QQ群 第一个群已经满500人(贫穷使我充不起鹅厂会员),这是第二个群。 群都满了。 https://blog.csdn.net/tingfenghanlei/article/details/85046120在这篇文章里主要讲了下MPC的原理和C++实现的一个简单例子。 这篇文章里主要写MPC的MATLAB实现。许多做控制的同学还是很喜欢用MATLAB的,可以先
MATLAB - 用命令行设计 MPC 控制器
系列文章目录 前言 本例演示如何通过命令行创建和测试模型预测控制器。 一、定义工厂模型 本示例使用《使用 MPC Designer 设计控制器》中描述的工厂模型。创建工厂的状态空间模型,并设置一些可选的模型属性,如输入、状态和输出变量的名称和单位。 % continuous-time state-space matrices, with
宇树科技A1机器狗开源QP-MPC-Controller仿真环境搭建及运行
参考文章:硕哥大佬知乎文章又一个开源的四足机器人控制器 - 知乎 (zhihu.com) 热心网友开源环境配置:解析A1-QP-MPC-Controller (matheecs.tech) 代码可以从知乎文章中跳转至github下载 本文主要用于说明如何搭建宇树科技开源代码运行环境,环境配置比较复杂,需要提前准备好一个游戏手柄,键盘无法控制机器狗运动 原始仓库采用 Docker 安装依赖环

无人驾驶控制算法LQR和MPC的仿真实现
1. LQR控制器 1.1 问题陈述 考虑一个质量为 m m m 的滑块在光滑的一维地面上运动。初始时,滑块的位置和速度均为 0 0 0。我们的目标是设计一个控制器,基于传感器测得的滑块位置 x x x,为滑块提供外力 u u u,使其能够跟随参考点 x r x_r xr 运动。 为建立动力学模型,我们采用以下微分方程: x ¨ = u m \ddot x = \frac
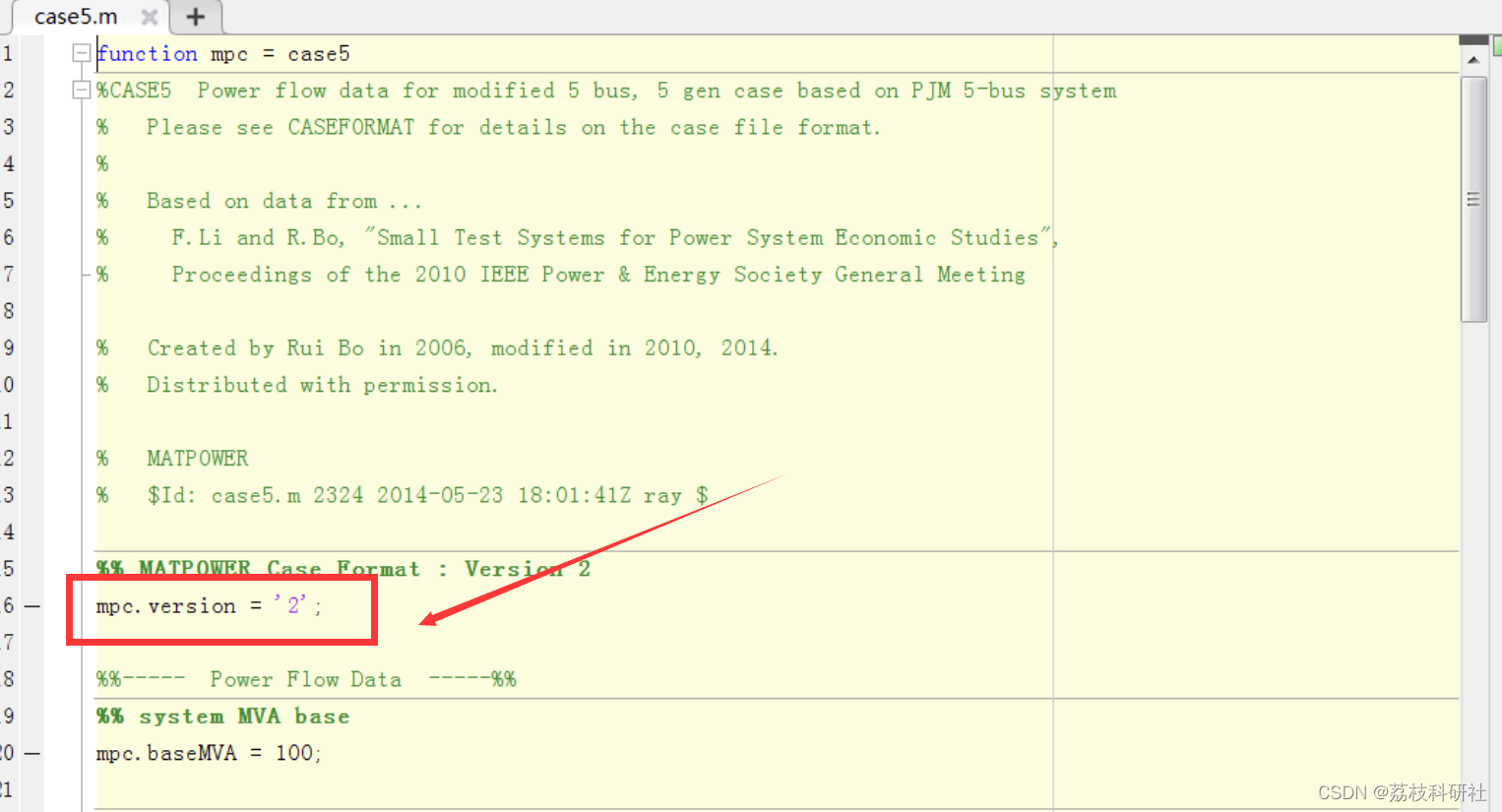
【matpower】潮流计算中mpc.version=2什么意思
👨🎓个人主页:研学社的博客 💥💥💞💞欢迎来到本博客❤️❤️💥💥 🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。 ⛳️座右铭:行百里者,半于九十。 📋📋📋本文目录如下:🎁🎁🎁 目录 💥1 知识回顾 📚2 case文件格式 🌈3 Matlab代码实现 💥1 知识回顾 【基础讲解】基于matpowe
【运动控制】模型预测控制(MPC)
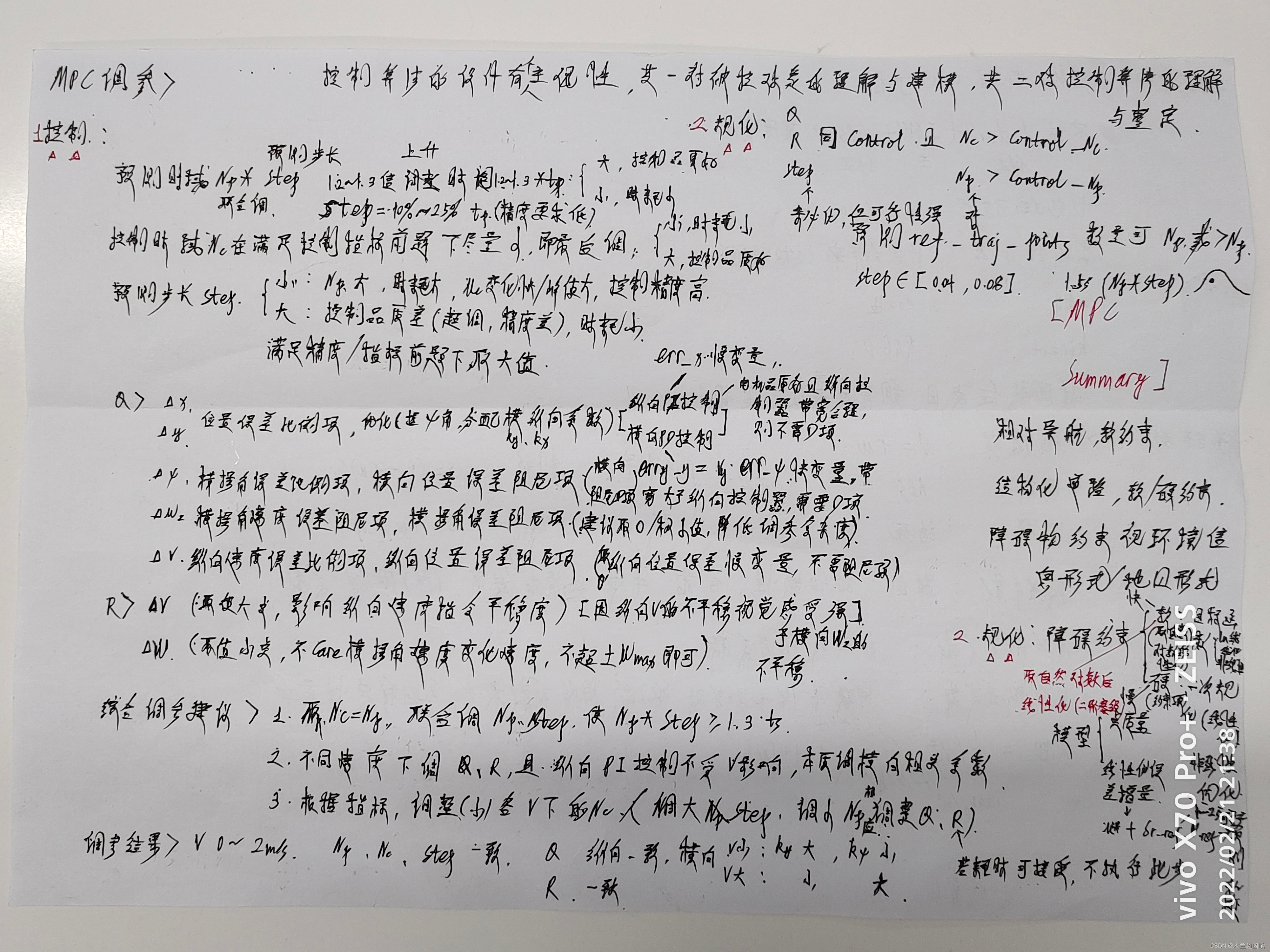
1.算法思想 利用被控对象的模型、当前状态和未来的控制量,预测未来的状态,通过滚动的求解带约束的优化问题,实现控制目的,具有预测模型、滚动优化和反馈校正三个特点。 2.算法原理 以下三图摘自《无人驾驶车辆模型预测控制》(第2版)龚建伟.北京理工大学出版社 3.算法调参 4.个人理解 1.标准化设计流程:系统辨识----系数冻结+时域/----数学仿真遍历测试; 2.标准化设计
增量式速度跟随,MPC,Simulink建模
完美的结果 1.对本车进行建模 2. 3.使用的模型是 4.代码段如下 function [sys,x0,str,ts] =Main_MPC_SpeedCtrl_du(t,x,u,flag)%***************************************************************% % Input:% t是采样时间, x是状

Microsoft Planetary Computer(MPC):在MPC上装Geemap
这个标题真的,微软员工看了都流泪,自己的产品上面装谷歌的东西。 不过讲真,在MPC上装geemap真的!特!别!丝!滑!因为他带着GPU,同时服务器在欧洲,所以下载什么包都是刷一下就过去了。 只需要运行四行代码,搞定一切。记得要在Terminal的模式下输入哈!Terminal模式这样打开: conda create -n gee py
Microsoft Planetary Computer(MPC):在云平台上创建虚拟环境和部署MMrotate
我来填上次说MPC很难创建虚拟环境的坑了! 申明!MFC创建的虚拟环境,server关掉之后就会不见!!!!!! MFC创建的虚拟环境,server关掉之后就会不见!!!!!! MFC创建的虚拟环境,server关掉之后就会不见!!!!!! server会在24小时内自动关闭,如果不希望进程关闭,请参考官方的帮
MATLAB - MPC - 优化问题(Optimization Problem)
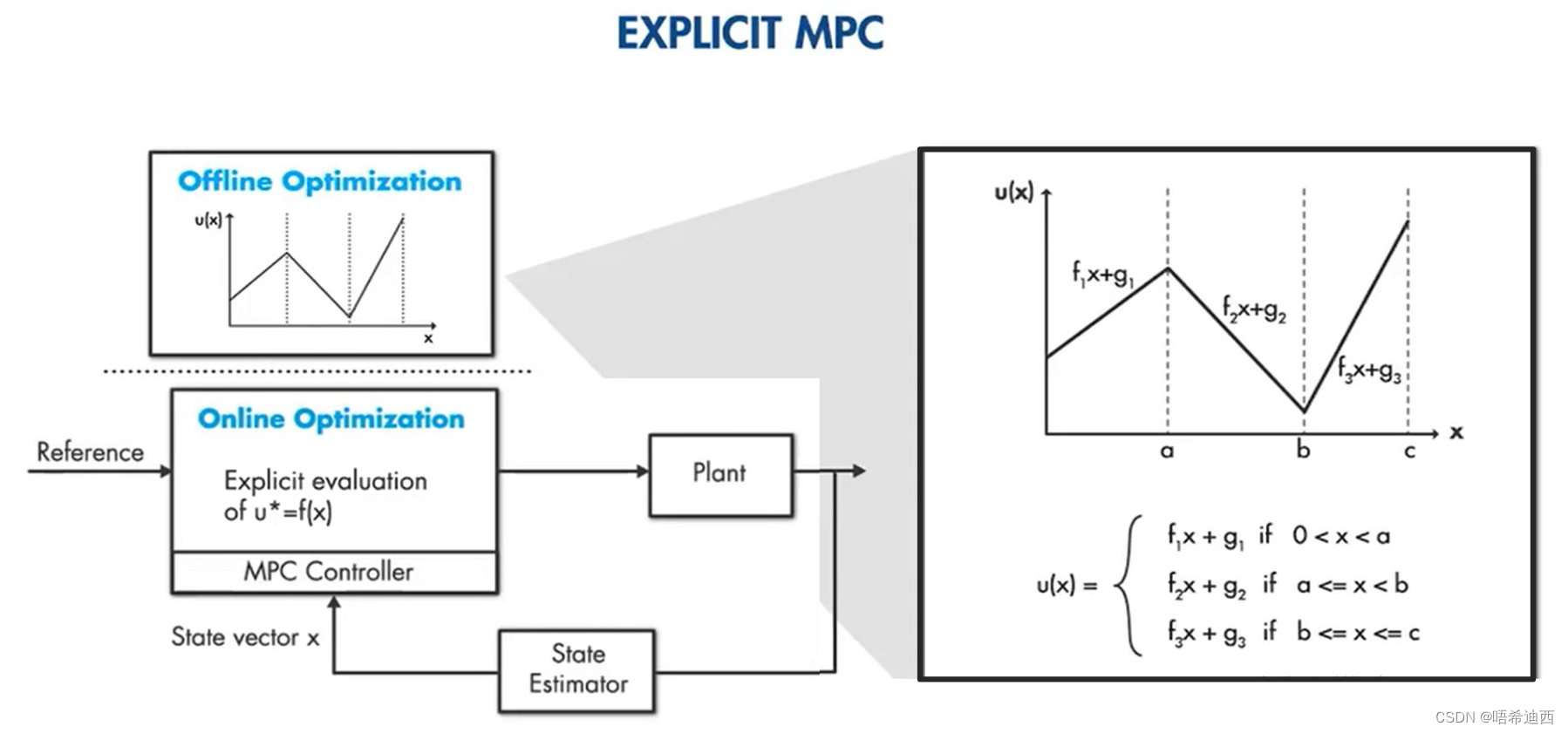
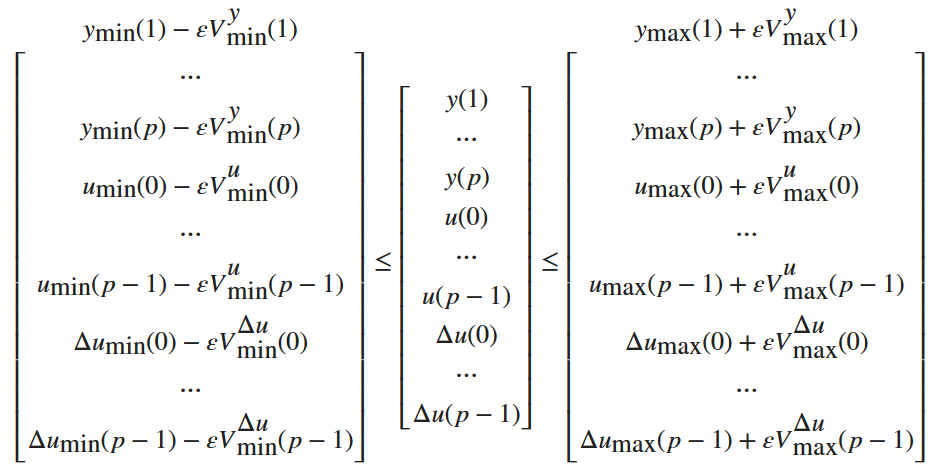
系列文章目录 前言 模型预测控制可在每个控制间隔内解决一个优化问题,具体来说就是二次规划(QP)。求解结果决定了被控对象在下一个控制间隔之前使用的操纵变量(MV)。 该 QP 问题具有以下特点: 目标或 "成本 "函数 - 要最小化的控制器性能的非负标量。约束条件 - 解决方案必须满足的条件,如 MV 和被控对象输出变量的物理边界。决策 - 在满足约束条件的同时使成本函数最小化的

【MPC学习笔记】01:MPC简介(Lecture 1_1 Unconstrained MPC)
本笔记来自北航诸兵老师的课程 课程地址:模型预测控制(2022春)lecture 1-1 Unconstrained MPC 文章目录 0 MPC 简介0.1 案例引入0.2 系统模型0.3 MPC的优点0.4 MPC的缺点0.5 MPC的未来 1 详细介绍 0 MPC 简介 0.1 案例引入 MPC(Model Predictive Control)模型预测控制,是预测控制

MATLAB - 使用 MPC Designer 线性化 Simulink 模型
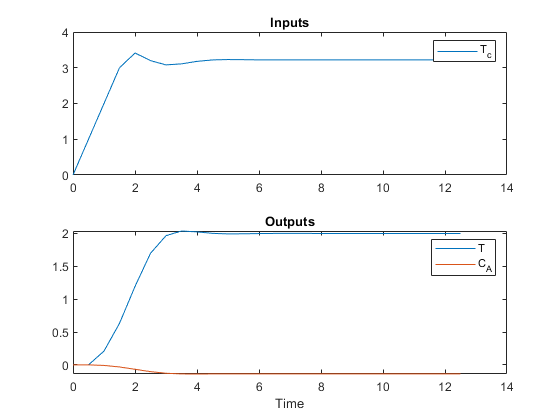
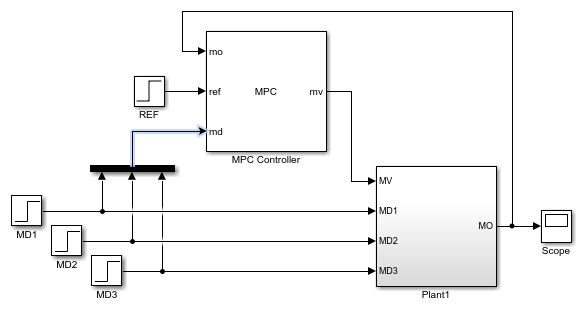
系列文章目录 前言 本主题介绍如何使用 MPC Designer 对 Simulink® 模型进行线性化。为此,请从包含 MPC 控制器块的 Simulink 模型打开该应用程序。本例中使用 CSTR_ClosedLoop 模型。 open_system('CSTR_ClosedLoop') 在模型窗口中,双击 MPC 控制器模块。 提示 在 MPC 控制器块参数对话框的默

TinyMPC - CMU (卡耐基梅隆大学)开源的机器人 MPC 控制器
系列文章目录 CasADi - 最优控制开源 Python/MATLAB 库 文章目录 系列文章目录前言一、机器人硬件对比1.1 Teensy 上的微控制器基准测试1.2 机器人硬件1.3 BibTeX 二、求解器三、功能(预期)3.1 高效3.2 鲁棒3.3 可嵌入式3.4 最小依赖性3.5 高效热启动3.6 接口 四、在 Ubuntu 安装4.1 在终端克隆此 repo4.2 导

MPC模型预测控制理论与实践
一、基本概念 最有控制的动机是在约束条件下达到最优的系统表现。 模型预测控制(MPC,Model Predictive Control)是通过模型来预测系统在某一未来时间段内的表现来进行优化控制,多用于数位控制,通常用离散型状态空间表达。主要有三个主要部分构成,1模型;2预测;3控制(做决策)。模型,模型可以是机理模型,也可以是一个基于数据的模型。(例如深度学习训练得到的模型)预测,建立一