本文主要是介绍增量式速度跟随,MPC,Simulink建模,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
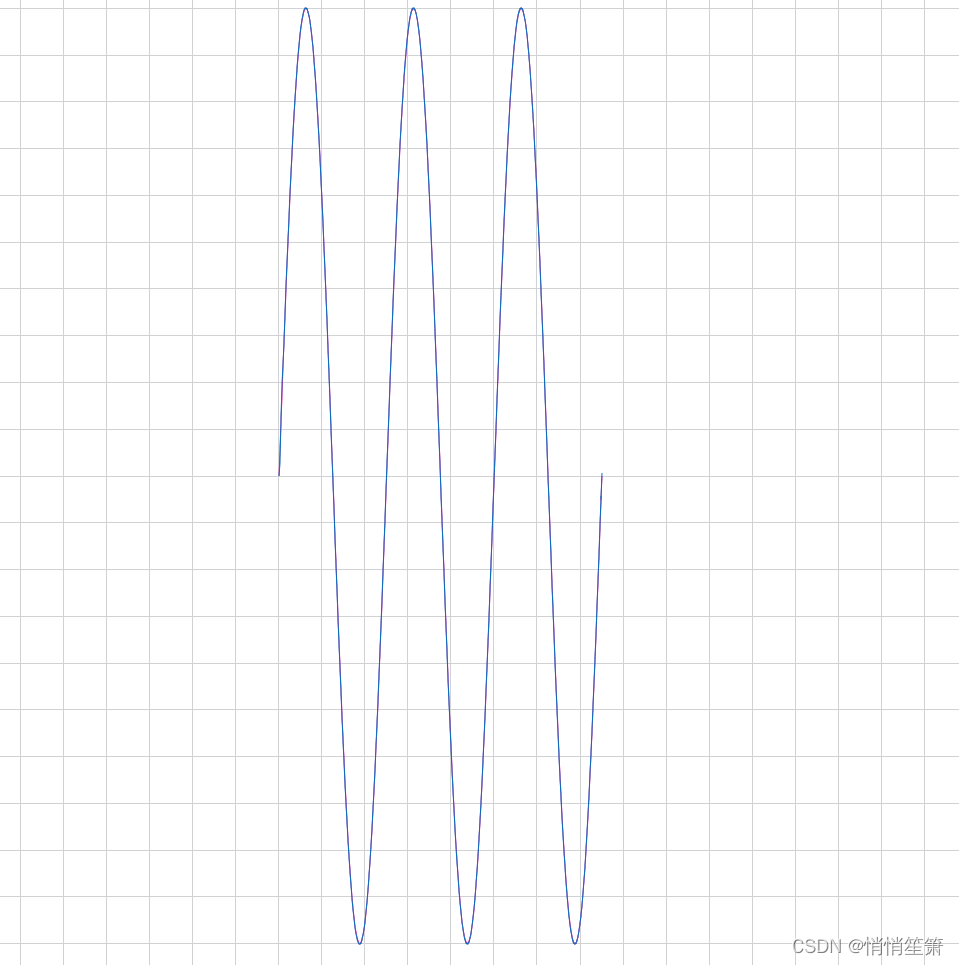
完美的结果
1.对本车进行建模
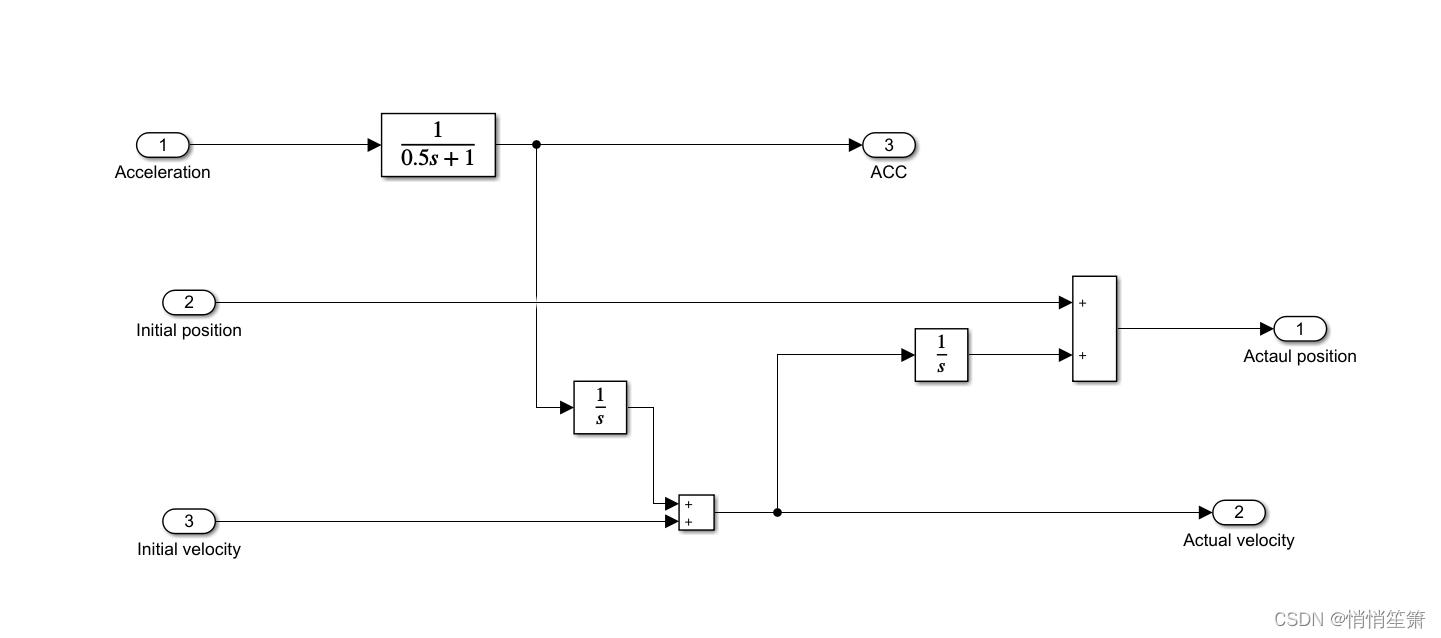
2.
3.使用的模型是
4.代码段如下
function [sys,x0,str,ts] =Main_MPC_SpeedCtrl_du(t,x,u,flag)
%***************************************************************%
% Input:
% t是采样时间, x是状态变量, u是输入(是做成simulink模块的输入,即CarSim的输出),
% flag是仿真过程中的状态标志(以它来判断当前是初始化还是运行等)% Output:
% sys输出根据flag的不同而不同(下面将结合flag来讲sys的含义),
% x0是状态变量的初始值,
% str是保留参数,设置为空
% ts是一个1×2的向量, ts(1)是采样周期, ts(2)是偏移量
%---------------------------------------------------------------%
% Published by: Kai Liu
% Email:leoking1025@bit.edu.cn
% My github: https://github.com/leoking99-BIT
%***************************************************************% switch flag,case 0 % Initialization %[sys,x0,str,ts] = mdlInitializeSizes; % Initializationcase 2 % Update %sys = mdlUpdates(t,x,u); % Update discrete statescase 3 % Outputs %sys = mdlOutputs(t,x,u); % Calculate outputscase {1,4,9} % Unused flagssys = []; otherwise % Unexpected flags %error(['unhandled flag = ',num2str(flag)]); % Error handlingend % end of switch
% End sfuntmpl%==============================================================
% Initialization, flag = 0,mdlInitializeSizes
% Return the sizes, initial conditions, and sample times for the S-function.
%==============================================================
function [sys,x0,str,ts] = mdlInitializeSizes
sizes = simsizes;%用于设置模块参数的结构体用simsizes来生成
sizes.NumContStates = 0; %模块连续状态变量的个数
sizes.NumDiscStates = 2; %模块离散状态变量的个数,实际上没有用到这个数值,只是用这个来表示离散模块
sizes.NumOutputs = 1; %S函数的输出,包括控制量和其它监测量
sizes.NumInputs = 2; %S函数模块输入变量的个数,即CarSim的输出量
sizes.DirFeedthrough = 1; %模块是否存在直接贯通(direct feedthrough). 1 means there is direct feedthrough.
% 直接馈通表示系统的输出或可变采样时间是否受到输入的控制。
% a. 输出函数(mdlOutputs或flag==3)是输入u的函数。即,如果输入u在mdlOutputs中被访问,则存在直接馈通。
% b. 对于一个变步长S-Function的“下一个采样时间”函数(mdlGetTimeOfNextVarHit或flag==4)中可以访问输入u。
% 正确设置直接馈通标志是十分重要的,因为它影响模型中块的执行顺序,并可用检测代数环。
sizes.NumSampleTimes = 1; %模块的采样次数,>=1sys = simsizes(sizes); %设置完后赋给sys输出x0 = zeros(sizes.NumDiscStates,1);%initial the state vector, of no usestr = []; % 保留参数,Set str to an empty matrix.ts = [0.05 0]; % ts=[period, offset].采样周期sample time=0.05,50ms %--Global parameters and initialization
global InitialGapflag; InitialGapflag = 0; % the first few inputs don't count. Gap it.
global MPCParameters; MPCParameters.Np = 30;% predictive horizonMPCParameters.Nc = 30;% control horizonMPCParameters.Nx = 2; %number of state variablesMPCParameters.Nu = 1; %number of control inputsMPCParameters.Ny = 1; %number of output variables MPCParameters.Ts = 0.05; %Set the sample timeMPCParameters.Q = 100; % cost weight factor MPCParameters.R = 1; % cost weight factor MPCParameters.qp_solver =0; %0: default, quadprog; 1:qpOASES; 2:CVXGENMPCParameters.refspeedT = 1; %0: default, step speed profile; %1:sine-wave speed profileMPCParameters.umin = -5.0; % the min of decelerationMPCParameters.umax = 3.5; % the max of accelerationMPCParameters.dumin = -5.0; % minimum limits of jerkMPCParameters.dumax = 5.0; % maximum limits of jerk
global WarmStart;WarmStart = zeros(MPCParameters.Np,1);
% End of mdlInitializeSizes%==============================================================
% Update the discrete states, flag = 2, mdlUpdate
% Handle discrete state updates, sample time hits, and major time step
% requirements.
%==============================================================
function sys = mdlUpdates(t,x,u)
% 基本没有用到这个过程;在后期的程序模块化时可以继续开发这个功能。sys = x;
% End of mdlUpdate.%==============================================================
% Calculate outputs, flag = 3, mdlOutputs
% Return the block outputs.
%==============================================================
function sys = mdlOutputs(t,x,u)global InitialGapflag;
global MPCParameters;
global WarmStart;
a_des=0t_Start = tic; % 开始计时
if InitialGapflag < 2 % get rid of the first two inputsInitialGapflag = InitialGapflag + 1;%
elseInitialGapflag = InitialGapflag + 1;%***********Step (1). Update vehicle states *************************% Vx = u(1); %车辆纵向速度,单位:km/h-->m/sa_x = u(2); %车辆纵向加速度,单位:g's-->m/s2 kesi = [Vx; a_x]; %更新车辆状态向量%********Step(2): Generate reference speed profile *******************%switch MPCParameters.refspeedT,case 0 % default, step speed profile%----设定阶梯式的期望速度曲线----------------------%SpeedProfile = func_ConstantSpeed(InitialGapflag, MPCParameters);case 1 % sine-wave speed profile%----设置sine wave形式 的期望速度曲线--------------%SpeedProfile = func_SineSpeed(InitialGapflag,MPCParameters);otherwise % Unexpected flags %error(['unexpected speed-profile:',num2str(MPCParameters.refspeedT)]); % Error handlingend % end of switch %****Step(3): update longitudinal vehilce model with inertial delay***%Ts = MPCParameters.Ts; % 50msStateSpaceModel.A = [1 Ts;0 1];StateSpaceModel.B = [0; 1]; StateSpaceModel.C = [1, 0];%****Step(4): MPC formulation;********************%%Update Theta and PHI for future states prediction[PHI, THETA] = func_Update_PHI_THETA(StateSpaceModel, MPCParameters);%Update H and f for cost function J[H, f, g] = func_Update_H_f(kesi, SpeedProfile, PHI, THETA, MPCParameters); %****Step(5): Call qp-solver********************%switch MPCParameters.qp_solver,case 0 % default qp-solver: quadprog[A, b, Aeq, beq, lb, ub] = func_Constraints_du_quadprog(MPCParameters, a_x);options = optimset('Display','off', ...'TolFun', 1e-8, ...'MaxIter', 2000, ...'Algorithm', 'active-set', ...'FinDiffType', 'forward', ...'RelLineSrchBnd', [], ...'RelLineSrchBndDuration', 1, ...'TolConSQP', 1e-8); warning off all % close the warnings during computation U0 = WarmStart; [U, FVAL, EXITFLAG] = quadprog(H, g, A, b, Aeq, beq, lb, ub, U0, options); %WarmStart = shiftHorizon(U); % Prepare restart, nominal close loop if (1 ~= EXITFLAG) %if optimization NOT succeeded.U(1) = 0.0;fprintf('MPC solver not converged!\n'); enda_des =a_x+U(1);case 1 % qpOASES[A, lb, ub, lbA, ubA] = func_Constraints_du_qpOASES(MPCParameters, a_x);options = qpOASES_options('default', ...'printLevel', 0); %=======================USE QP==================%[U, FVAL, EXITFLAG, iter, lambda] = qpOASES(H, g, A, lb, ub, lbA, ubA, options); %%=======================USE SQP==================%% try% H=sparse(H);% A=sparse(A);% catch% fprintf('qpOASES Error reported\n'); % end% if (qpOASES_hotstart_flag)% [qpOASES_QP, U, FVAL, EXITFLAG, iter, lambda] = qpOASES_sequence('i', H, g, A, lb, ub, lbA, ubA, options);% qpOASES_hotstart_flag = 1;% else % [U, FVAL, EXITFLAG, iter, lambda] = qpOASES_sequence('m', qpOASES_QP, H, g, A, lb, ub, lbA, ubA, options); %% endif (0 ~= EXITFLAG) %if optimization NOT succeeded.U(1) = 0.0;fprintf('MPC solver: qpOASES not converged!\n'); enda_des = U(1);case 2 % CVXGEN%--由于License限制,本书不提供CVXGEN版的solver,读者可自行生成[vars, status] = MPC_Speed_Controller_CVXGEN(kesi, SpeedProfile, MPCParameters);if (1 == status.converged) %if optimization succeeded.a_des = vars.u_0; elsea_des = 0;fprintf('MPC solver not converged!\n'); endotherwise % Unexpected flags %error(['unexpected qp-solver, Sol_method=',num2str(flag)]); % Error handlingend % end of switch end % end of if Initialflag < 1 % %****Step(6): 由期望的加速度生成Throttle和Brake;********************%t_Elapsed = toc( t_Start ); %computation time sys = [a_des];
% end %End of mdlOutputs.%==============================================================
% sub functions
%==============================================================
function [Vref] = func_SineSpeed(Index, MPCParameters)
%生成正弦形式的期望速度曲线%****Sine wave parametersT = 50; %正弦速度曲线的周期,unit: sfreq = 1/T; %正弦速度曲线的频率,unit: HzAmplit = 10;%正弦速度曲线的幅值offst = 20; %正弦速度曲线的偏移Ts = MPCParameters.Ts; %采样时间=0.05,unit: sNp = MPCParameters.Np; % 预测时域:30Vref = cell(Np,1);t0 = Index*Ts;for i = 1:1:Npt = t0 + i*Ts;Vref{i,1} = Amplit*sin(2*pi*freq*t) + offst; end% end %EoFfunction [Vref] = func_ConstantSpeed(InitialGapflag, MPCParameters)
% 生成阶梯形式的期望速度曲线 Ts = MPCParameters.Ts; %采样时间=0.05,unit: sNp = MPCParameters.Np; % 预测时域:30Vref = cell(Np,1);% 自定义阶梯的形式if InitialGapflag < 400Vset = 10;elseif InitialGapflag < 800Vset = 10;elseif InitialGapflag < 1500Vset = 20;elseVset = 5;endendendfor i = 1:1:NpVref{i,1} = Vset; end% end %EoFfunction [Throttle, Brake] = func_AccelerationTrackingController(ahopt)
% 车辆下位控制器将期望加速度转化为油门控制量和制动主缸压力控制量K_brake = 0.3;K_throttle = 0.1; %0.05;Brake_Sat = 15;Throttle_Sat = 1;if ahopt < 0 % Brake controlBrake = K_brake * ahopt;if Brake > Brake_SatBrake = Brake_Sat;endThrottle = 0;else % throttle control Brake = 0;Throttle = K_throttle *ahopt;if Throttle > Throttle_SatThrottle = Throttle_Sat;endif Throttle < 0Throttle = 0;endend
% end %EoFfunction u0 = shiftHorizon(u) %shift control horizonu0 = [u(:,2:size(u,2)), u(:,size(u,2))]; % size(u,2))function [PHI, THETA] = func_Update_PHI_THETA(StateSpaceModel, MPCParameters)
%***************************************************************%
% 预测输出表达式 Y(t)=PHI*kesi(t)+THETA*DU(t)
% Y(t) = [Eta(t+1|t) Eta(t+2|t) Eta(t+3|t) ... Eta(t+Np|t)]'
%***************************************************************%Np = MPCParameters.Np;Nc = MPCParameters.Nc;Nx = MPCParameters.Nx;Ny = MPCParameters.Ny;Nu = MPCParameters.Nu;A = StateSpaceModel.A;B = StateSpaceModel.B;C = StateSpaceModel.C;PHI_cell=cell(Np,1); %PHI=[CA CA^2 CA^3 ... CA^Np]' THETA_cell=cell(Np,Nc); %THETAfor j=1:1:NpPHI_cell{j,1}=C*A^j; % demision:Ny* Nxfor k=1:1:Ncif k<=jTHETA_cell{j,k}=C*A^(j-k)*B; % demision:Ny*Nuelse THETA_cell{j,k}=zeros(Ny,Nu);endendendPHI=cell2mat(PHI_cell); % size(PHI)=[(Ny*Np) * Nx]THETA=cell2mat(THETA_cell);% size(THETA)=[Ny*Np Nu*Nc]
% end %EoFfunction[H, f, g] = func_Update_H_f(kesi, SpeedProfile, PHI, THETA, MPCParameters)
%***************************************************************%
% trajectory planning
%***************************************************************%Np = MPCParameters.Np;Nc = MPCParameters.Nc; Q = MPCParameters.Q;R = MPCParameters.R;Qq = kron(eye(Np),Q); % Q = [Np*Nx] * [Np*Nx] Rr = kron(eye(Nc),R); % R = [Nc*Nu] * [Nc*Nu]Vref = cell2mat(SpeedProfile); error = PHI * kesi; %[(Nx*Np) * 1]H = THETA'*Qq*THETA + Rr; f = (error' - Vref')*Qq*THETA;g = f';
% end %EoFfunction [A, b, Aeq, beq, lb, ub] = func_Constraints_du_quadprog(MPCParameters, um)
%************************************************************************%
% generate the constraints of the vehicle
%
%************************************************************************%Np = MPCParameters.Np;Nc = Np; dumax = MPCParameters.dumax;umin = MPCParameters.umin; umax = MPCParameters.umax; Umin = kron(ones(Nc,1),umin);Umax = kron(ones(Nc,1),umax);Ut = kron(ones(Nc,1),um);
%----(1) A*x<=b----------%A_t=zeros(Nc,Nc);for p=1:1:Ncfor q=1:1:Ncif p >= q A_t(p,q)=1;else A_t(p,q)=0;endend end A_cell=cell(2,1);A_cell{1,1} = A_t; %A_cell{2,1} = -A_t;A=cell2mat(A_cell); %b_cell=cell(2, 1);b_cell{1,1} = Umax - Ut; %b_cell{2,1} = -Umin + Ut;b=cell2mat(b_cell); % %----(2) Aeq*x=beq----------%Aeq = [];beq = [];%----(3) lb=<x<=ub----------%lb=kron(ones(Nc,1),-dumax);ub=kron(ones(Nc,1),dumax);
% end %EoFfunction [A_t, lb, ub, lbA, ubA] = func_Constraints_du_qpOASES(MPCParameters, um)Np = MPCParameters.Np;Nc = Np; dumax = MPCParameters.dumax;umin = MPCParameters.umin;umax = MPCParameters.umax; Umin = kron(ones(Nc,1), umin);Umax = kron(ones(Nc,1), umax);Ut = kron(ones(Nc,1),um);
%----(1) lbA <= A_t*x<=ubA----------%A_t=zeros(Nc,Nc);for p=1:1:Ncfor q=1:1:Ncif p >= q A_t(p,q)=1;else A_t(p,q)=0;endend end ubA = Umax - Ut; %lbA = Umin - Ut;
%---- lb=<x<=ub----------%lb=kron(ones(Nc,1),-dumax);ub=kron(ones(Nc,1),dumax);
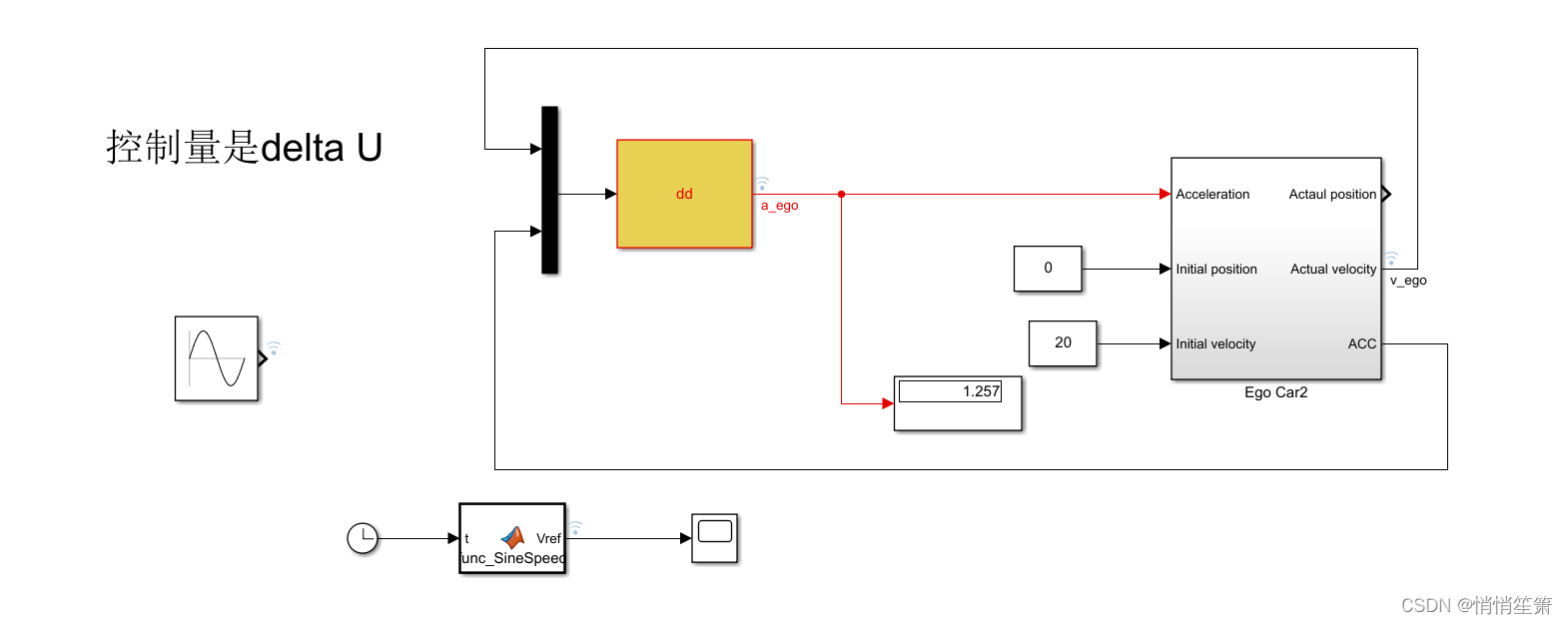
% end %EoF上传Simulink模型
这篇关于增量式速度跟随,MPC,Simulink建模的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!