本文主要是介绍【运动控制】模型预测控制(MPC),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
1.算法思想
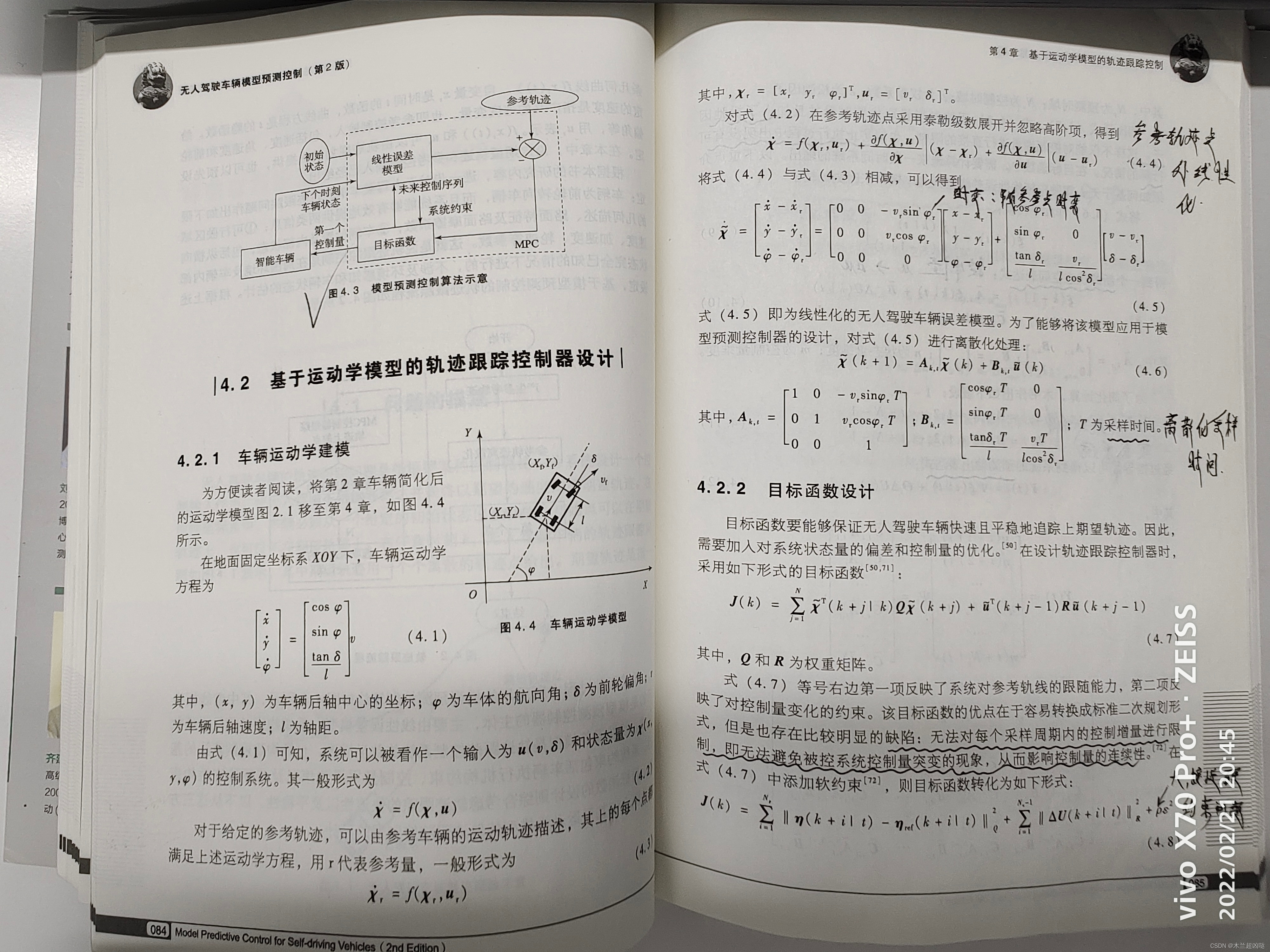
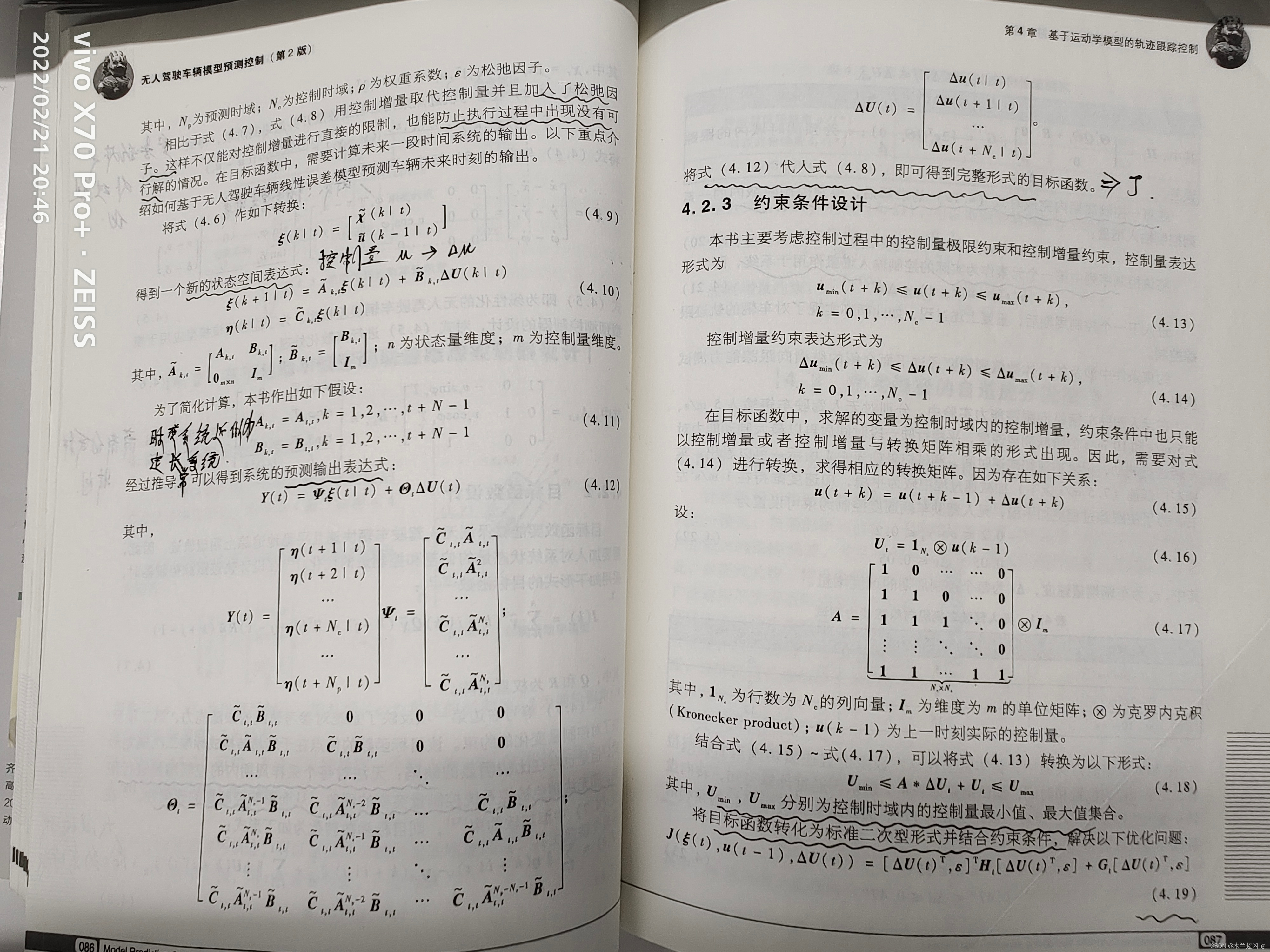
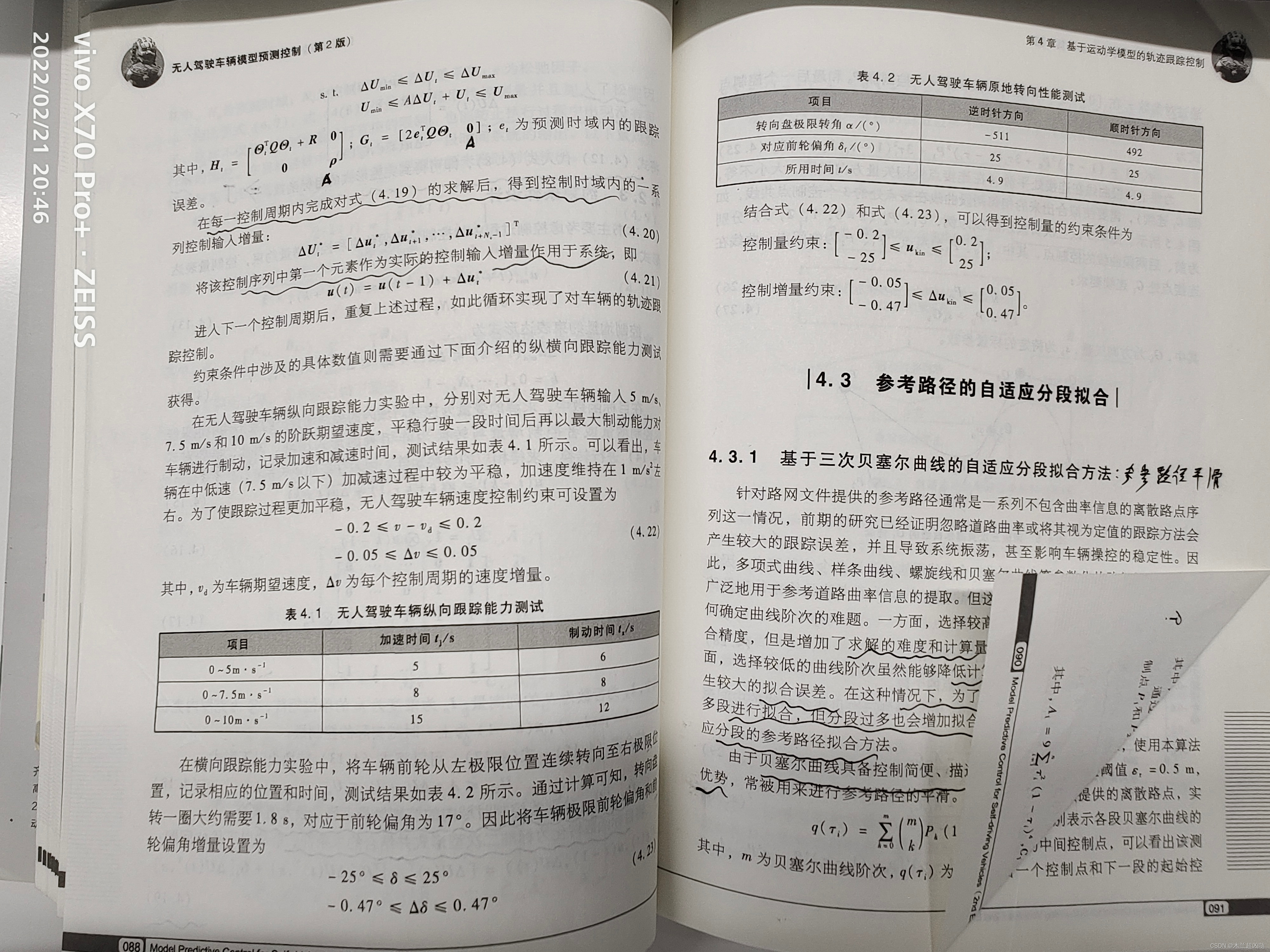
利用被控对象的模型、当前状态和未来的控制量,预测未来的状态,通过滚动的求解带约束的优化问题,实现控制目的,具有预测模型、滚动优化和反馈校正三个特点。
2.算法原理
以下三图摘自《无人驾驶车辆模型预测控制》(第2版)龚建伟.北京理工大学出版社
3.算法调参
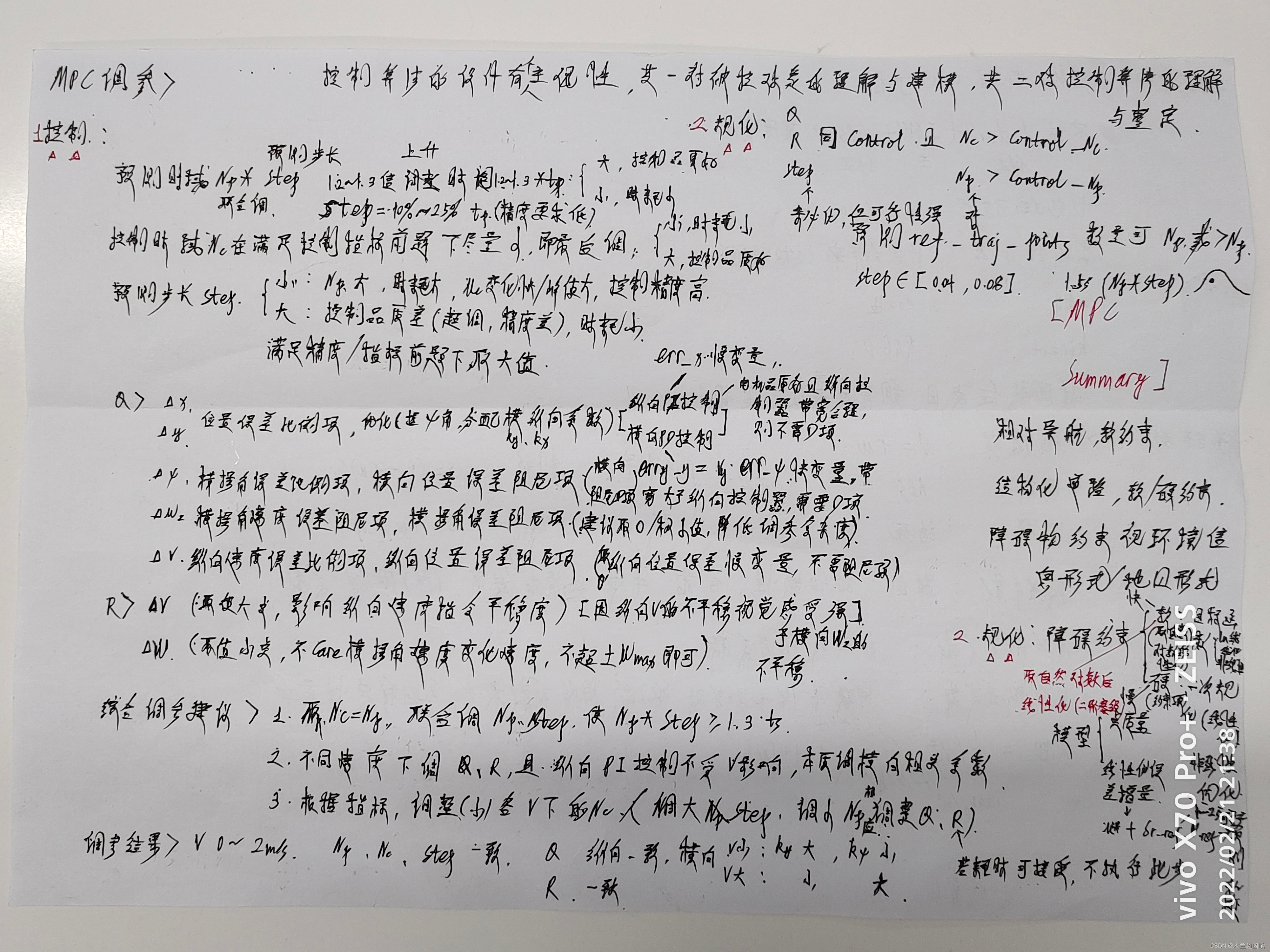
4.个人理解
1.标准化设计流程:系统辨识----系数冻结+时域/----数学仿真遍历测试;
2.标准化设计指标:时域指标;
3.设计结果可直接用于真实被控对象,控制品质与数学仿真结果出入很小;
4.相比PID优点:可加约束;缺点:运算量大,且对控制频率要求更高(同控制频率时,稳态误差相对较大)。
5.实现
...
6.视频分享
…
7.相关论文
…
这篇关于【运动控制】模型预测控制(MPC)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








