lane专题

(Lane Deteciton-1)PersFormer
介绍 在自动驾驶中,下游模块如规划和控制通常需要将车道位置表示为正交的鸟瞰图(BEV)而不是前视图表示。使用BEV表示有助于更好地与环境中的交互式代理(如车辆、道路标志、交通灯等)对齐任务,并且与其他传感器(如LiDAR和雷达)兼容。 传统方法及其局限性: 简单投影方法:一种传统的方法是将透视视图中的车道简单地投影到BEV空间中。这种方法虽然直接,但会导致投影的车道线在高度变化的场景(如上

Ultra Fast Structure-aware Deep Lane Detection的训练实战
Ultra Fast Structure-aware Deep Lane Detection的训练实战 1、模型介绍 论文 知乎 代码 CULane数据集简介 2、基于CULane数据集格式的训练 2.1、video to img import globimport osimport cv2# --------视频转图像--------------------------------

论文阅读《FENET: FOCUSING ENHANCED NETWORK FOR LANE DETECTION》
ABSTRACT 受人类驾驶专注力的启发,这项研究开创性地利用聚焦采样(Focusing Sampling)、部分视野评估(Partial Field of View Evaluation)、增强型 FPN 架构和定向 IoU 损失(Directional IoU Loss)等技术增强网络,有针对性地创新解决了自动驾驶精确车道检测的障碍。实验证明,我们的 "聚焦采样 "策略与统一方法不同,强调重

Lane Tech学员如何使用物联网推动实际传感器计划
Lane Tech高中的学生没有典型的课程 - 他们正在学习嵌入式传感器技 术,数字制作,设计和解决问题,数据分析,团队合作以及获得物联网 (IoT)的实践经验。 今年春天,Dan Law位于Lane Tech的物理计算实验室的学生使用不同的电子设备和工具来构建遥控百叶窗,智能灯,恒温控制器和其他传感器实验。这些学生使用粒子光子将他们的对象和传感器连接到互联网,这使他们能够无线监视和管理这些

关于Lane以及USC-SIPI
做图像处理的小伙伴应该没有人不知道lane这幅图像,但是关于lane的起源并不为人所道。 下面给出链接,讲讲关于lane图的来源的故事。 http://www.cs.cmu.edu/~chuck/lennapg/lenna.shtml 目前,lane图在标准图库USC_SIPS中的Miscellaneous图库中,该图库包含很多彩色,灰度图像,是一个很经典的图库。 下面给出图像数据库地址。
Advanced Lane Detection源码解读(二)
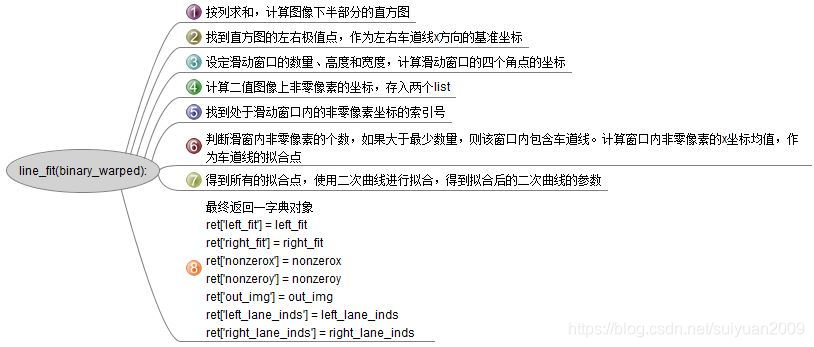
1.2.2 二次曲线拟合 line_fit.py 引入相关的包 import numpy as npimport cv2import matplotlib.pyplot as pltimport matplotlib.image as mpimgimport picklefrom combined_thresh import combined_threshfrom perspect

Advanced Lane Detection源码解读(一)
1. 源码解读 1.1 文件目录结构 源码文件下载自GitHub:advanced_lane_detection-master advanced_lane_detection-master camera_cal 存放用于相机标定棋盘格照片 *.jpg output_images *.png test_images *.jpg calibrate_camera.p pickle文件,由cal
![[python]基于Ultra-Fast-Lane-Detection-v2车道线实时检测onnx部署](https://img-blog.csdnimg.cn/direct/1b66e0a6121548ecb61d49ab9b800c9a.jpeg)
[python]基于Ultra-Fast-Lane-Detection-v2车道线实时检测onnx部署
【论文地址】 https://arxiv.org/pdf/2206.07389.pdf 【框架地址】 https://github.com/cfzd/Ultra-Fast-Lane-Detection-v2 【框架介绍】 Ultra-Fast-Lane-Detection-v2(UFL-D-v2)算法是一种高效的车道线检测算法,它旨在快速准确地识别和定位道路上的车道线。UFL-D-v2算
深度强化学习的变道策略:Harmonious Lane Changing via Deep Reinforcement Learning
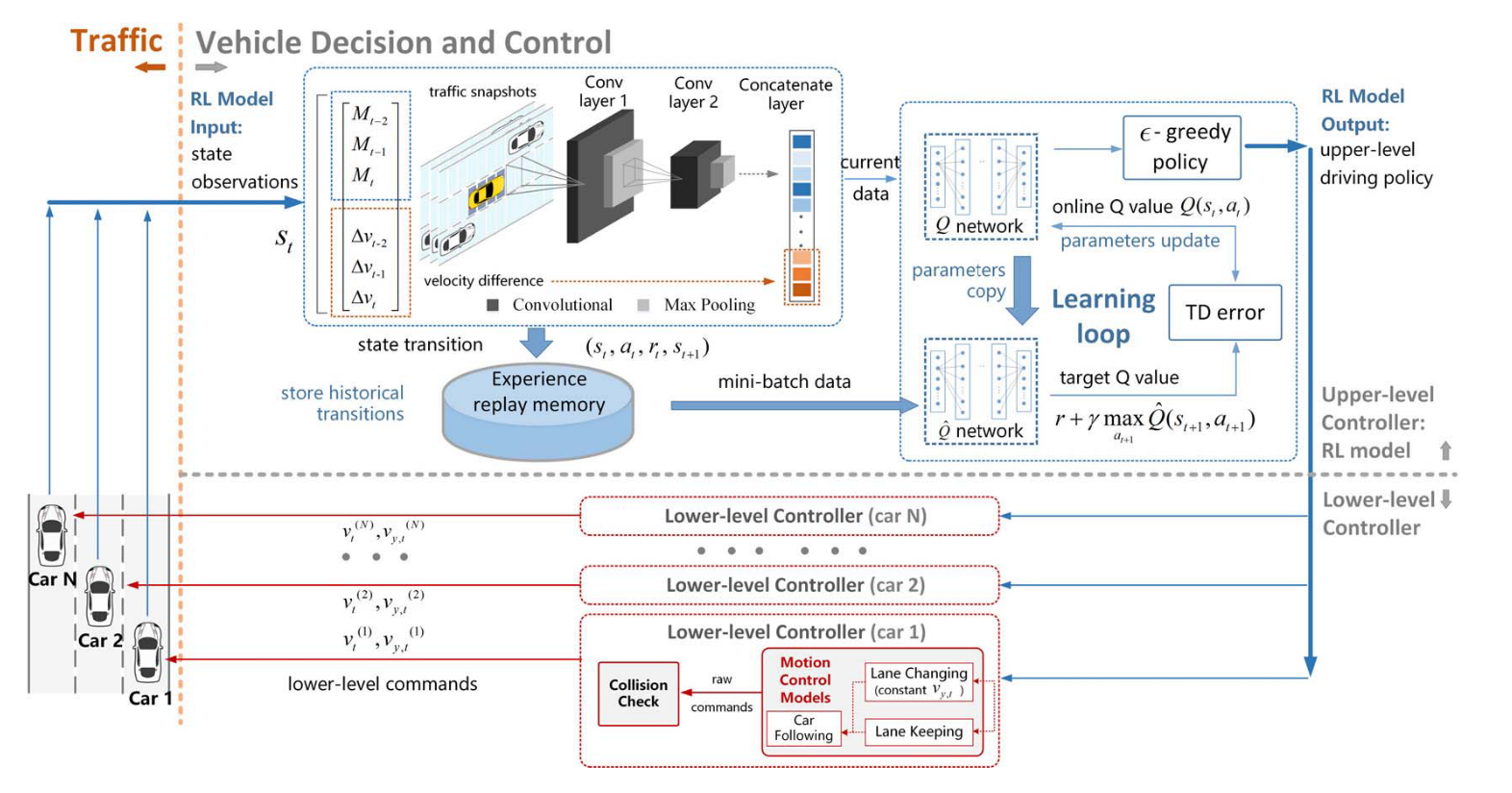
偏理论,假设情况不易发生 摘要 多智能体强化学习的换道策略,不同的智能体在每一轮学习后交换策略,达到零和博弈。 和谐驾驶仅依赖于单个车辆有限的感知结果来平衡整体和个体效率,奖励机制结合个人效率和整体效率的和谐。 Ⅰ. 简介 自动驾驶不能过分要求速度性能, 考虑单个车辆的厌恶和所在路段的整体交通效率的奖励函数,适当的混合以提高整体的交通效率。 章节安排: 简介 和谐变道的深

车道线检测End-to-end Lane Detection through Differentiable Least-Squares Fitting(论文解读)
论文链接 https://arxiv.org/pdf/1902.00293 动机 一般的车道线检测算法分为两步,第一步进行图像分割,第二步对分割结果进行后处理。这种2-step的方法不是直接预测车道线,所以通过分割的方式预测车道线不一定能够实现最佳的表现。 贡献 提出一个可以直接预测车道线的方法。利用最小二乘法可微的性质,实现车道线检测网络端到端的训练。车道线检测网络分为两个部分:(1)
![[论文阅读] CLRerNet: Improving Confidence of Lane Detection with LaneIoU](https://img-blog.csdnimg.cn/914be7db17eb404491ad773e49a61a6f.png)
[论文阅读] CLRerNet: Improving Confidence of Lane Detection with LaneIoU
Abstract 车道标记检测是自动驾驶和驾驶辅助系统的重要组成部分。采用基于行的车道表示的现代深度车道检测方法在车道检测基准测试中表现出色。通过初步的Oracle实验,我们首先拆分了车道表示组件,以确定我们方法的方向。我们的研究表明,现有的基于行的检测器已经能预测出正确的车道位置,而准确表示与地面实况相交-不相交(IoU)的置信度分数是最有利的。基于这一发现,我们提出了 LaneIoU,通过考

论文解读--Robust lane detection and tracking with Ransac and Kalman filter
使用随机采样一致性和卡尔曼滤波的鲁棒的车道线跟踪 摘要 在之前的一篇论文中,我们描述了一种使用霍夫变换和迭代匹配滤波器的简单的车道检测方法[1]。本文扩展了这项工作,通过结合逆透视映射来创建道路的鸟瞰视图,应用随机样本共识来帮助消除由于道路噪声和伪影造成的异常值,以及一个卡尔曼滤波器来帮助平滑车道跟踪器的输出。 1.介绍 多年来,高速公路上的司机安全一直是人
[论文阅读] CLRerNet: Improving Confidence of Lane Detection with LaneIoU
Abstract 车道标记检测是自动驾驶和驾驶辅助系统的重要组成部分。采用基于行的车道表示的现代深度车道检测方法在车道检测基准测试中表现出色。通过初步的Oracle实验,我们首先拆分了车道表示组件,以确定我们方法的方向。我们的研究表明,现有的基于行的检测器已经能预测出正确的车道位置,而准确表示与地面实况相交-不相交(IoU)的置信度分数是最有利的。基于这一发现,我们提出了 LaneIoU,通过考
S4.2.4.5 Lane Polarity Inversion
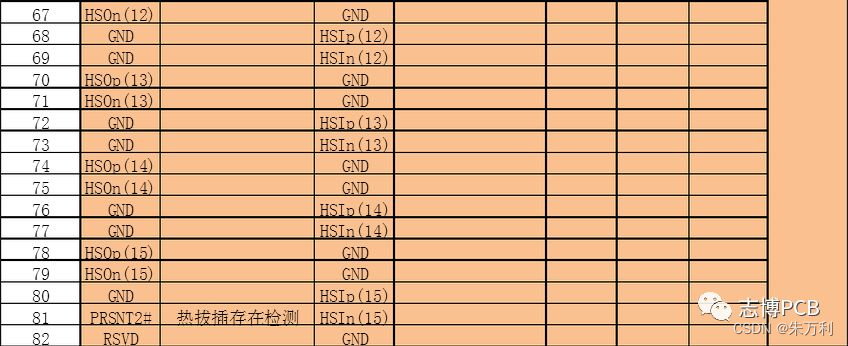
一 本章节主讲知识点 1.1 Polarity Inversion 极性反转 1.2 Lane Reversal 通道翻转 二 本章节原文翻译 2.1 极性反转 原文摘录: PCIe 协议规定,必须支持该特性。该特性的目标也是为了简化 PCB 的布线。每个 lane 都包含一组发送(Tx)和接收(Rx),而 Tx 和 Rx 分别包含两根差分信号线(D+ 和 D-)。Polarity

《Key Points Estimation and Point Instance Segmentation Approach for Lane Detection》翻译
《车道线检测的关键点预测和点实例分割方法-PINet》 一、摘要1、体系结构2、方法概述3、方法优点 二、研究现状三、实现方法1、车道线点实例网络2、后处理方法 四、实验结果1、评价标准2、实验 一、摘要 1、体系结构 包含共享的特征提取层和多个分支,用于检测和嵌入到车道线集群中。 2、方法概述 该方法能在车道线上生成精确的点,针对这些点,将聚类问题投射为点云实例分割问题
AutoDriver Lane Change
一.Lane Change Process ①Lane Change流程图 ②Lane Change逻辑 (1)routing发送两条routes后,planning会生成两条参考线信息,一个是 forward reference line,另一条是 change lane reference line (2)change_lane_gap_finder工具类在change lan
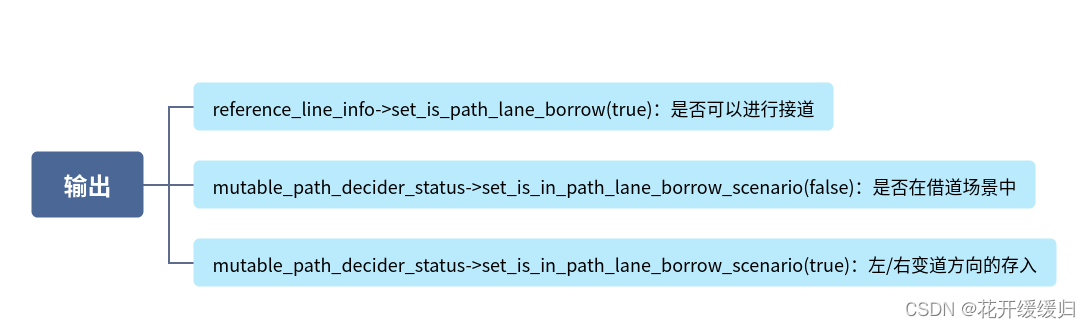
APOLLO:lane_borrow_decider代码解读
APOLLO:lane_borrow_decider代码解读 一、作用:是否产生变道决策二、数据结构三、代码逻辑四、参考链接 一、作用:是否产生变道决策 是否nuge前方静态、低速障碍物),并将决策结果保存到 reference_line_info和mutable_path_decider_status 中。 二、数据结构 定义了一个path_decider_status:(

Ultra-Fast-Lane-Detection-v2 {后处理优化}//参考
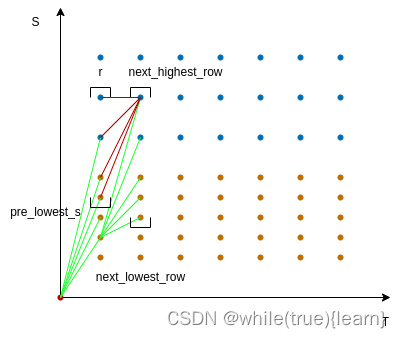
采用三次多项式拟合生成的anchor特征点,在给定的polyfit_draw函数中,degree参数代表了拟合多项式的度数。 具体来说,当我们使用np.polyfit函数进行数据点的多项式拟合时,我们需要指定一个度数。这个度数决定了多项式的复杂度。例如: degree = 1:线性拟合,也就是最简单的直线拟合。拟合的多项式形式为 f(y)=ax+b。 degree = 2:二次多项式拟合。