forecasting专题

《A DECODER-ONLY FOUNDATION MODEL FOR TIME-SERIES FORECASTING》阅读总结
介绍了一个名为TimeFM的新型时间序列预测基础模型,该模型受启发于自然语言处理领域的大语言模型,通过再大规模真实世界和合成时间序列数据集上的预训练,能够在多种不同的公共数据集上实现接近最先进监督模型的零样本预测性能。 该模型使用真实世界和合成数据集构建的大型时间序列语料库进行预训练,并展示了在不同领域、预测范围和时间粒度的未见数据集上的准确零样本预测能力。 1、引言 时间序列在零售、金融、

LLMs:《A Decoder-Only Foundation Model For Time-Series Forecasting》的翻译与解读
LLMs:《A Decoder-Only Foundation Model For Time-Series Forecasting》的翻译与解读 导读:本文提出了一种名为TimesFM的时序基础模型,用于零样本学习模式下的时序预测任务。 背景痛点:近年来,深度学习模型在有充足训练数据的情况下已成为时序预测的主流方法,但这些方法通常需要独立在每个数据集上训练。同时,自然语言处理领域的大规模预训练
论文《Visual Point Cloud Forecasting enables Scalable Autonomous Driving》详细解析
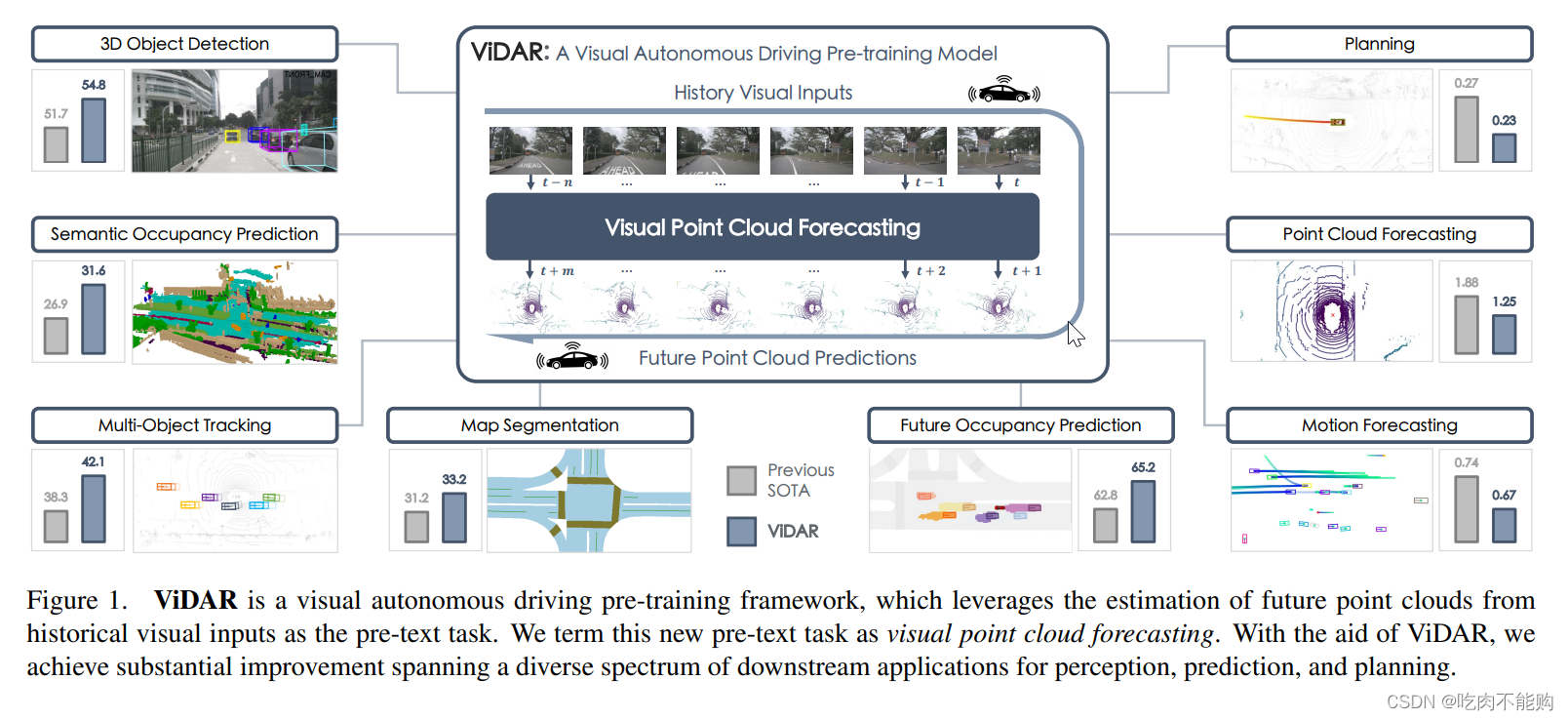
论文《Visual Point Cloud Forecasting enables Scalable Autonomous Driving》详细解析 摘要 该论文提出了一种新的预训练任务,称为“视觉点云预测”(Visual Point Cloud Forecasting),从历史视觉输入中预测未来的点云。论文介绍了ViDAR模型,通过这种方法显著提高了多种下游任务(如感知、预测和规划)的性能。
论文笔记:Time-LLM: Time Series Forecasting by Reprogramming Large Language Models
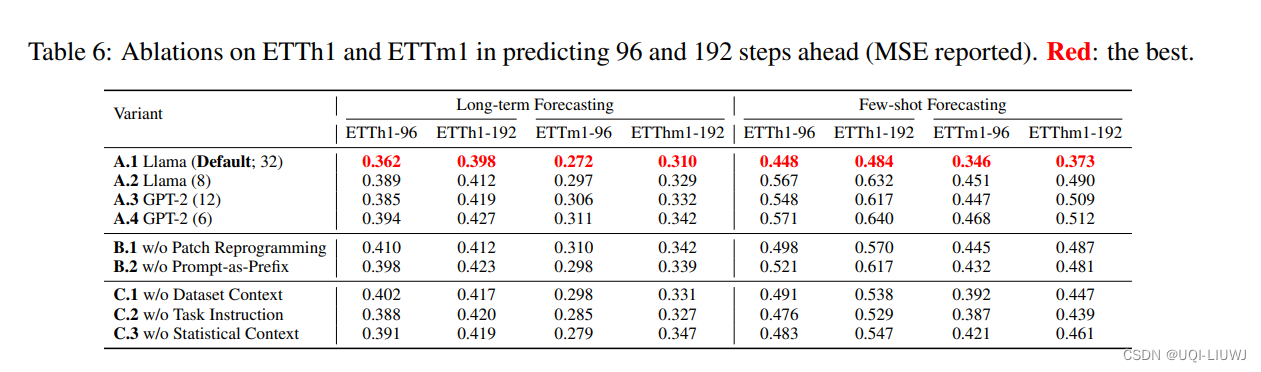
iclr 2024 reviewer 评分 3888 1 方法 提出了 Time-LLM, 是一个通用的大模型重编程(LLM Reprogramming)框架将 LLM 轻松用于一般时间序列预测,而无需对大语言模型本身做任何训练 为什么需要时序数据和文本数据对齐:时序数据和文本数据在表达方式上存在显著差异,两者属于不同的模态。时间序列既不能直接编辑,也不能无损地用自然语言描述 3
论文笔记;LargeST: A Benchmark Dataset for Large-ScaleTraffic Forecasting
Neurips 2023 1 intro 目前交通预测数据集的问题 规模小,通常只包含数百个节点和边在时间覆盖范围上存在严重不足,通常不超过6个月单个节点的元数据不足 ——> 提出了一个新的基准数据集LargeST 广泛的图大小,包括加利福尼亚州的8,600个传感器丰富的时间覆盖和丰富的节点信息——每个传感器包含5年的数据和全面的元数据liuxu77/LargeST: LargeST:

Spatio-Temporal Pivotal Graph Neural Networks for Traffie Flow Forecasting
摘要:交通流量预测是一个经典的时空数据挖掘问题,具有许多实际应用。,最近,针对该问题提出了各种基于图神经网络(GNN)的方法,并取得了令人印象深刻的预测性能。然而,我们认为大多数现有方法忽视了某些节点(称为关键节点)的重要性,这些节点自然地与多个其他节点表现出广泛的联系。由于与其他节点相比,关键节点具有复杂的时空依赖性,因此对关键节点进行预测提出了挑战。在本文中,我们提出了一种基于 GNN 的

Latent Diffusion Transformer for Probabilistic Time Series Forecasting
Latent Diffusion Transformer for Probabilistic Time Series Forecasting 摘要:多元时间序列的概率预测是一项极具挑战性但又实用的任务。本研究提出将高维多元时间序列预测浓缩为潜在空间时间序列生成问题,以提高每个时间戳的表达能力并使预测更易于管理。为了解决现有工作难以扩展到高维多元时间序列的问题,我们提出了一种称为潜在扩散变换器(L
DLinear:Are Transformers Effective for Time Series Forecasting?
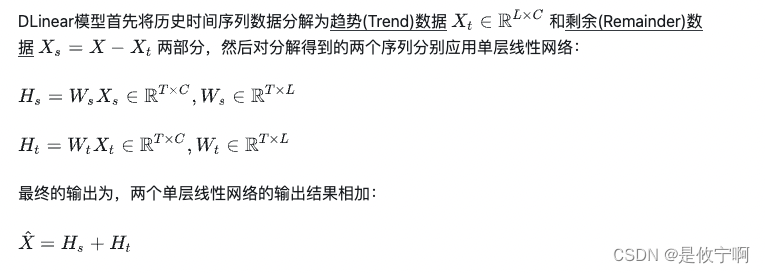
一、要解决的问题: (1)虽然采用位置编码和使用标记在Transformer中嵌入子序列有助于保留一些排序信息,但置换不变自注意机制的性质不可避免地导致时间信息丢失。 +我们不是对时间点感兴趣,而是对时间点之间的变化感兴趣 ➡️Transformer对长时间序列预测还有效果吗 (2)iterated multi-step (IMS) forecasting:基于Transformer的长序

Forecasting (一):introduction
本篇文章希望对demand forecasting涉及的技术进行框架性的整理。首先参考的是供应链及库存相关的著作,一般其中都会有关于forecasting的一章。 References Waters, D. (2003). Inventory control and management 2nd. John Wiley & Sons. (偏OM)Axsäter, S. (2015). Inve

文献阅读笔记《Spatial-temporal Forecasting for Regions without Observations》13页
目录 目录 目录 发行刊物 ABSTRACT 1 INTRODUCTION 2 RELATED WORK(相关工作 2.1 Spatial-temporal Forecasting(时空预测 2.2 Spatial-temporal Forecasting withIncomplete Data(不完全数据的时空预测 2.3 Graph Contrastive Learnin
【时序预测】2、prophet:Forecasting at Scale | Python 文档教程
创智人视频介绍 文章目录 一、Quick Start二、饱和预测2.1 Forecasting Growth 预测增长2.2 Saturating Minimum 饱和最小值 三、Trend Changepoints 趋势变化点3.1 Automatic changepoint detection in Prophet 自动检测变化点3.2 Adjusting trend flex
![[论文阅读笔记21]Quo Vadis: Is Trajectory Forecasting the Key Towards Long-Term Multi-Object Tracking?](https://img-blog.csdnimg.cn/61dd20e7363f41bfa5fbf5da1a2eb9f4.png)
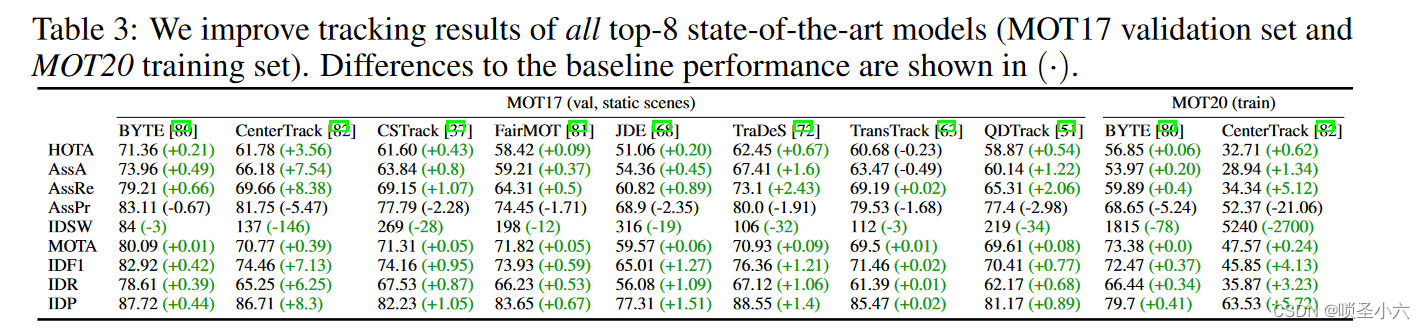
[论文阅读笔记21]Quo Vadis: Is Trajectory Forecasting the Key Towards Long-Term Multi-Object Tracking?
这篇文章是少有的根据轨迹预测来做MOT的文章. 论文链接: https://arxiv.org/pdf/2210.07681.pdf 代码: https://github.com/dendorferpatrick/QuoVadis 1. Abstract 长时跟踪是一个经常被忽略的问题. 对于大于三秒钟的轨迹丢失, SOTA的跟踪器中只能恢复不到10%的轨迹. 轨迹丢失的时间越长,
Quo Vadis_Is Trajectory Forecasting the Key 论文笔记
主要解决长期跟踪问题 研究动机:在更长的时间范围内对未来轨迹进行推理 Introduction 首先说明,目前方法已经在短期预测、可见物体跟踪方向上取得成功。 用数据+图说明,长遮挡时,跟踪成功率(ID recall率)显著降低(问题引入) (读一下这篇引用 Donald B Reid. An algorithm for tracking multiple targets. In Tra
【时序预测】2、prophet:Forecasting at Scale | Python 文档教程
创智人视频介绍 文章目录 一、Quick Start二、饱和预测2.1 Forecasting Growth 预测增长2.2 Saturating Minimum 饱和最小值 三、Trend Changepoints 趋势变化点3.1 Automatic changepoint detection in Prophet 自动检测变化点3.2 Adjusting trend flex

How to Save an ARIMA Time Series Forecasting Model in Python (如何在Python中保存ARIMA时间序列预测模型)
How to Save an ARIMA Time Series Forecasting Model in Python 原文作者:Jason Brownlee 原文地址:https://machinelearningmastery.com/save-arima-time-series-forecasting-model-python/ 译者微博:@从流域到海域 译者博客:blog.csd
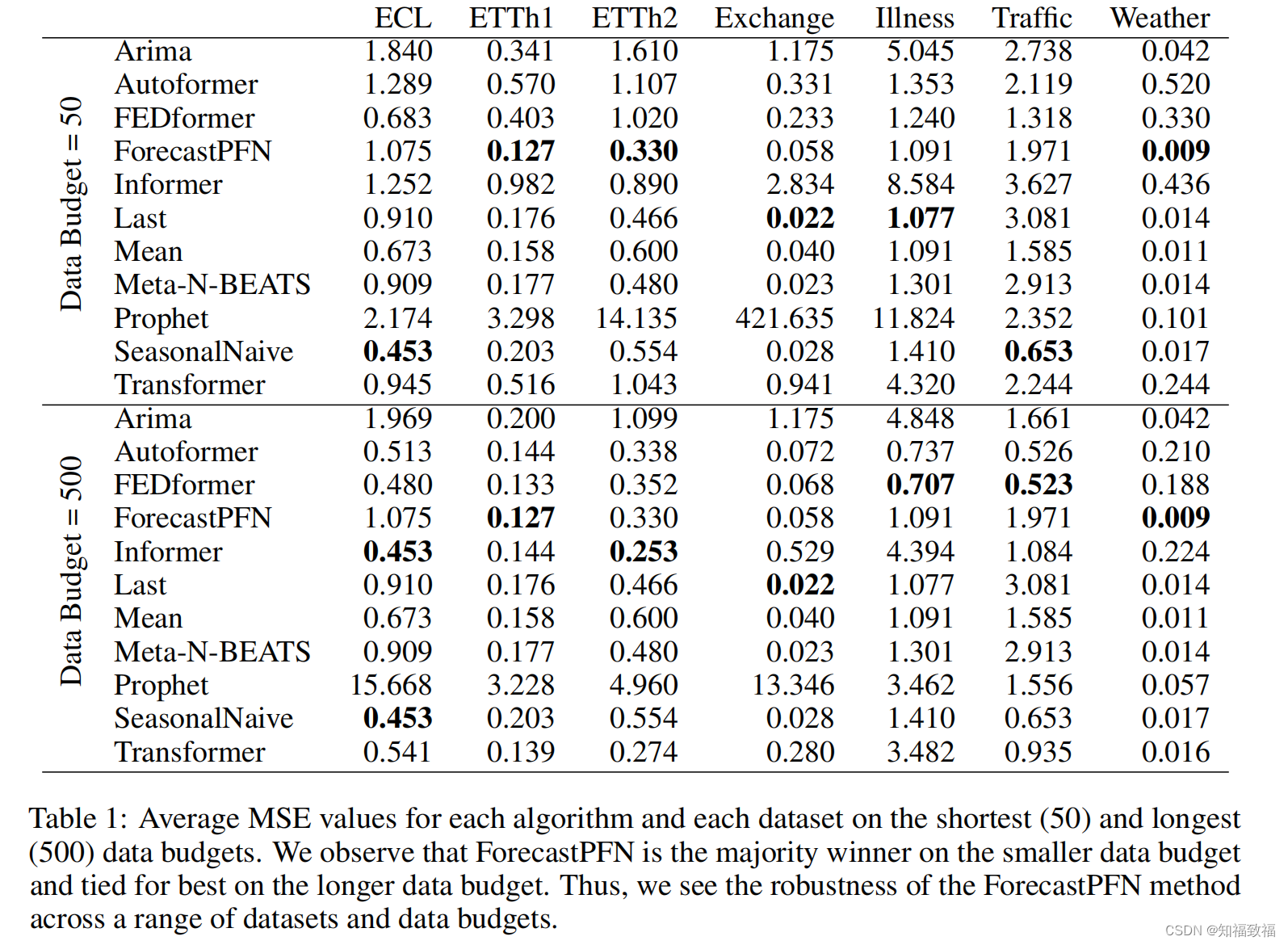
ForecastPFN: Synthetically-Trained Zero-Shot Forecasting
ForecastPFN: Synthetically-Trained Zero-Shot Forecasting 2023.11.3 arxiv 论文下载 源码 ForecastPFN(Prior-data Fitted Networks)是zero-shot场景的:经过初始预训练后,它可以对一个全新的数据集进行预测,而没有来自该数据集的训练数据。 这个文章比较偏统计,可能涉及到先验、贝叶斯相关

1- forecasting at scale论文阅读
目录 1. 什么是时间序列2. 什么是时间序列预测3. 时间序列预测的范式4. 时间序列的专有名词介绍5. 时间序列评估 1. 什么是时间序列 按时间先后顺序出现的有序序列 2. 什么是时间序列预测 点预测:预测未来的某一个时间点,它的值到底是多少,例如明天的收盘股价、最高温度等。区间预测:明天的温度范围,例如-8~4°,落在这个范围的概率是多少 时间序列预测,不仅
lag-llama源码解读(Lag-Llama: Towards Foundation Models for Time Series Forecasting)
Lag-Llama: Towards Foundation Models for Time Series Forecasting 文章内容: 时间序列预测任务,单变量预测单变量,基于Llama大模型,在zero-shot场景下模型表现优异。创新点,引入滞后特征作为协变量来进行预测。 获得不同频率的lag,来自glunoTS库里面的源码 def _make_lags(middle: int
14-----Hourly Probabilistic Forecasting of Solar Power
太阳能逐时概率预报 概率预测方法没看懂,图文基本无参考 随机森林(RF)。需要在RF中设置三个参数,数字树木- B(森林大小),M -预测因子的数量 Three parameters are required to be set in RF, the number of trees - B (forest size), m - the number of predictors out o
2023年小美赛认证杯A题太阳黑子预测(Sunspot Forecasting)思路模型代码解析
2023年小美赛认证杯A题:太阳黑子预测(Sunspot Forecasting) 【请电脑打开本文链接,扫描下方名片中二维码,获取更多资料】 一、问题重述 太阳黑子是太阳光球上的现象,呈暂时性斑点,比周围区域更暗。它们是由磁通量浓度引起的表面温度降低区域,抑制对流现象。太阳黑子通常出现在活跃区域内,通常是相反磁极的一对。它们的数量随着约11年的太阳周期而变化。 单个太阳黑子或太阳黑子群可能
2023年小美赛认证杯A题太阳黑子预测(Sunspot Forecasting)思路模型代码解析
2023年小美赛认证杯A题:太阳黑子预测(Sunspot Forecasting) 【请电脑打开本文链接,扫描下方名片中二维码,获取更多资料】 一、问题重述 太阳黑子是太阳光球上的现象,呈暂时性斑点,比周围区域更暗。它们是由磁通量浓度引起的表面温度降低区域,抑制对流现象。太阳黑子通常出现在活跃区域内,通常是相反磁极的一对。它们的数量随着约11年的太阳周期而变化。 单个太阳黑子或太阳黑子群可能
论文阅读 Forecasting at Scale (一)
最近在看时间序列的文章,回顾下经典 论文地址 项目地址 Forecasting at Scale 摘要1、介绍2、时间业务序列的特点3、Prophet预测模型3.1、趋势模型3.1.1、非线性饱和增长3.1.2、具有变化点的线性趋势3.1.3、自动转换点选择3.1.4、趋势预测的不确定性 摘要 预测是一项常见的数据科学任务,能够帮助组织进行容量规划、目标设定和异常检
ST-GRAT: A Novel Spatio-temporal Graph Attention Networks for Accurately Forecasting Dynamically Cha
研究问题 基于动态空间依赖的交通流预测问题 背景动机 传统方法不论是外部输入图结构还是自己学出图结构都假定道路之间的空间依赖关系是固定的,因此它们只计算一次空间依赖关系,并一直使用计算出的依赖关系,而不考虑动态变化的交通条件。通过注意力机制来建模动态空间依赖的模型往往忽略了图上固有的结构信息RNN有不能直接访问长输入序列中的过去的特征的限制,不如attention好 模型思想 空间注意力

【论文笔记】Point Cloud Forecasting as a Proxy for 4D Occupancy Forecasting
原文链接:https://arxiv.org/abs/2302.13130 1. 引言 运动规划需要预测其余物体的运动,但相应的感知模块如建图、目标检测、跟踪和轨迹预测通常都需要大量人力标注HD地图、语义标签、边界框或物体的轨迹,难以扩展到大型无标签数据集上。3D点云预测是一种自监督方法,但其算法隐式地捕捉传感器的外参(自车运动)、内参(激光雷达的采样模式)和其余物体的形状与运动。但自动驾驶系

《Generic Dynamic Graph Convolutional Network for traffic flow forecasting》阅读笔记
论文标题 《Generic Dynamic Graph Convolutional Network for traffic flow forecasting》 干什么活:交通流预测(traffic flow forecasting )方法:动态图卷积网络(Dynamic Graph Convolutional Network)创新:通用(Generic) 作者 隔壁北航的大佬们太强了。这个

DeepAR:Probabilistic forecasting with autoregressive recurrent network
DeepAR:Probabilistic forecasting with autoregressive recurrent network 一般的时间序列预测方法是做点预测,即预测未来某个时间点的具体值。但对于一些具体业务比如预测销量来说预测一个概率区间更加易于决策。DeepAR是一个做概率预测的方法,同时也可以做点预测。 首先简单介绍一下时间序列和常见的处理方法 一、方法介绍 Deep