本文主要是介绍论文《Visual Point Cloud Forecasting enables Scalable Autonomous Driving》详细解析,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
论文《Visual Point Cloud Forecasting enables Scalable Autonomous Driving》详细解析
摘要
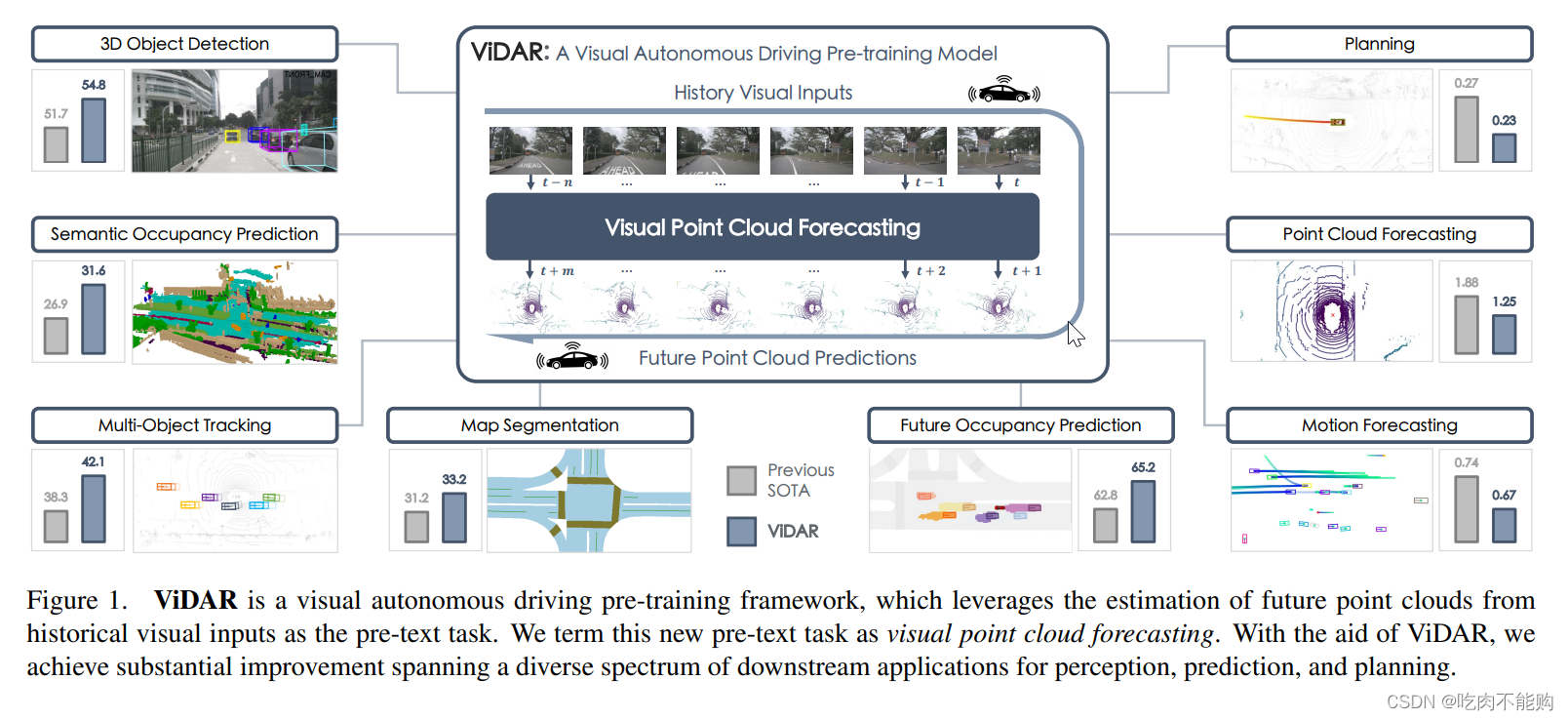
该论文提出了一种新的预训练任务,称为“视觉点云预测”(Visual Point Cloud Forecasting),从历史视觉输入中预测未来的点云。论文介绍了ViDAR模型,通过这种方法显著提高了多种下游任务(如感知、预测和规划)的性能。
引言
目前视觉自动驾驶的预训练研究较少,主要挑战在于需要同时处理语义、3D几何和时间动态信息。为了应对这些挑战,提出了视觉点云预测任务。该任务通过预测未来的点云来实现语义、3D结构和时间动态信息的协同学习,从而在各种下游任务中表现出色。
主要贡献
- 视觉点云预测任务:提出从历史视觉输入中预测未来点云的新预训练任务。
- ViDAR模型:开发了一种通用模型,用于预训练视觉BEV编码器。该模型包括三个部分:历史编码器、潜在渲染操作符和未来解码器。
- 实验验证:在nuScenes数据集上的实验结果表明,ViDAR在多种下游任务中显著优于现有方法。
方法论
1. ViDAR模型概述
- 历史编码器:提取来自多视角图像序列的BEV嵌入。
- 潜在渲染操作符:模拟体渲染操作,将历史嵌入转换为几何嵌入。
- 未来解码器:自回归地预测未来的BEV特征,生成未来的点云。
2. 潜在渲染
- 使用特征期望函数和条件概率函数来计算和定制每个网格的特征。
- 通过多组潜在渲染增强几何特征的多样性,提升下游任务的性能。
3. 未来解码器
- 未来解码器基于历史BEV特征和自车运动条件,迭代预测未来的BEV特征。
- 使用多层感知器(MLP)编码自车运动条件,并通过Transformer层进行未来特征的预测。
实验与结果
1. 数据集
- 使用nuScenes数据集进行实验,验证ViDAR在点云预测和下游任务中的有效性。
2. 点云预测
- ViDAR在点云预测任务中显著优于现有的4D-Occ方法,尤其在1秒和3秒的预测中,误差减少了约33%和18%。
3. 感知任务
- 在3D目标检测、语义占据预测、地图分割和多目标跟踪任务中,ViDAR预训练后的模型性能显著提升。例如,在3D目标检测中,ViDAR预训练使mAP提高了约4.3%。
4. 预测任务
- 在运动预测任务中,ViDAR预训练显著减少了最小平均距离误差(minADE)和最终预测误差(minFDE),并提高了EPA指标。
5. 规划任务
- ViDAR预训练显著降低了碰撞率,并提高了规划精度,展示了其在端到端自动驾驶中的潜力。
结论
该论文通过提出视觉点云预测任务和开发ViDAR模型,为视觉自动驾驶的预训练提供了一种新的方法。实验结果表明,ViDAR在多种下游任务中表现出色,验证了其在可扩展自动驾驶中的有效性。
总结
ViDAR模型及其视觉点云预测任务为自动驾驶系统提供了一种有效的预训练方法,显著提升了下游任务的性能,展示了在实际应用中的巨大潜力。通过这一方法,研究人员可以更好地利用视觉和LiDAR数据,提高自动驾驶系统的鲁棒性和准确性。
这篇关于论文《Visual Point Cloud Forecasting enables Scalable Autonomous Driving》详细解析的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





