driving专题

阅读笔记--Guiding Attention in End-to-End Driving Models
作者:Diego Porres1, Yi Xiao1, Gabriel Villalonga1, Alexandre Levy1, Antonio M. L ́ opez1,2 出版时间:arXiv:2405.00242v1 [cs.CV] 30 Apr 2024 这篇论文研究了如何引导基于视觉的端到端自动驾驶模型的注意力,以提高它们的驾驶质量和获得更直观的激活图。 摘 要 介绍

Segmentation简记-Multi-stream CNN based Video Semantic Segmentation for Automated Driving
创新点 1.RFCN & MSFCN 总结 网络结构如图所示。输入视频得到图像分割结果。 简单粗暴

Segmentation简记5-AuxNet: Auxiliary tasks enhanced Semantic Segmentation for Automated Driving
创新点 1.分割网络为主任务,深度估计网络为辅任务 2.loss的设计 总结如图所示 网络结构如图所示 其实很容易理解。 backbone是基于ResNet50 分割网络是基于FCN8 深度估计网络与分割网络类似,最后一层是回归深度层。 最有意思的是两种任务的loss的合并。 分割的loss很常见:cross entropy 深度loss:mean absolute error 算法一:

DS简记1-Real-time Joint Object Detection and Semantic Segmentation Network for Automated Driving
创新点 1.更小的网络,更多的类别,更复杂的实验 2. 一体化 总结 终于看到一篇检测跟踪一体化的文章 网络结构如下: ResNet10是共享的Encoder,yolov2 是检测的Deconder,FCN8 是分割的Deconder。 其实很简单,论文作者也指出:Our work is closest to the recent MultiNet. We differ by focus
【论文解读】Planning-oriented Autonomous Driving
UniAD 摘要引言方法Perception: Tracking and MappingPrediction: Motion ForecastingPrediction: Occupancy PredictionPlanningLearning 实验结论 摘要 现代自动驾驶系统的特征是按顺序的模块化任务,即感知、预测和规划。为了执行广泛多样的任务并实现高级智能,现代方法要么为单个

Altium Designer-Net has no driving source解决办法
Altium Designer-Net has no driving source解决办法 问题分析:图中有一个器件的管脚属性设定成了驱动源(power),但是却并没有连接电源 解决办法:在元件库中修改管脚属性为passive,然后再在原理图中更新,具体更新方法见如下链接https://blog.csdn.net/u011816009/article/details/102559057
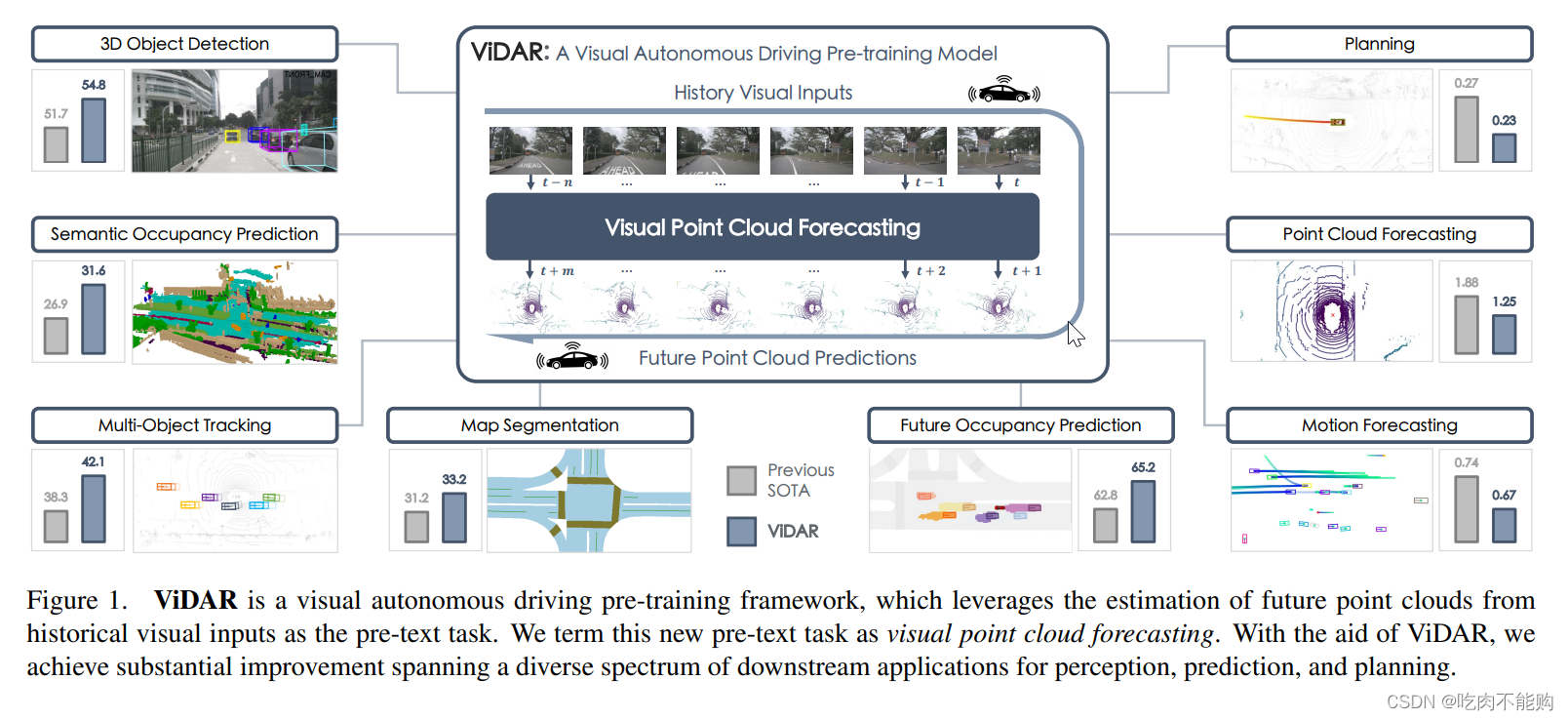
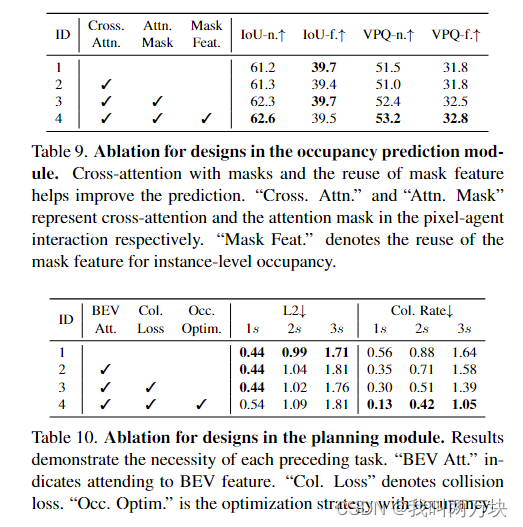
论文《Visual Point Cloud Forecasting enables Scalable Autonomous Driving》详细解析
论文《Visual Point Cloud Forecasting enables Scalable Autonomous Driving》详细解析 摘要 该论文提出了一种新的预训练任务,称为“视觉点云预测”(Visual Point Cloud Forecasting),从历史视觉输入中预测未来的点云。论文介绍了ViDAR模型,通过这种方法显著提高了多种下游任务(如感知、预测和规划)的性能。

特斯拉全自动驾驶系统Tesla‘s Full-Self Driving (FSD)
版权声明 本文原创作者:谷哥的小弟作者博客地址:http://blog.csdn.net/lfdfhl Overview Tesla’s FSD is a suite of features that includes Autopilot, Navigate on Autopilot, Auto Lane Change, Autopark, Summon, and Traffic
3D Object Detection for Autonomous Driving: A Comprehensive Survey文献阅读
目录 简言 文献地址: 重要网址(该项目持续更新中) 摘要 1、介绍 2、基础概念 2.1 3D object detection 2.2 Datasets 2.3 Evaluation metrics 2.3.1 评估指标类-1 2.3.2 评估指标类-2 2.3.3 评估指标对比 3、基于Lidar的三维目标检测 3.1 基于数据表示的 3D 检测方
<REAL-TIME TRAFFIC OBJECT DETCTION FOR AUTONOMOUS DRIVING>论文阅读
Abstract 随着计算机视觉的最新进展,自动驾驶迟早成为现代社会的一部分,然而,仍有大量的问题需要解决。尽管现代计算机视觉技术展现了优越的性能,他们倾向于将精度优先于效率,这是实时应用的一个重要方面。大型目标检测模型通常需要更高的计算能力,这是通过使用更复杂的机载硬件来实现的,对于自动驾驶来说,这些要求转化为燃料成本的增加,并最终导致里程的减少,此外,尽管有计算需求,但现
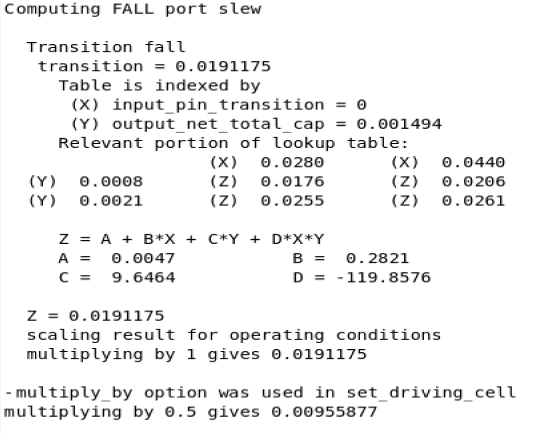
静态时序分析:SDC约束命令set_driving_cell详解
相关阅读 静态时序分析https://blog.csdn.net/weixin_45791458/category_12567571.html?spm=1001.2014.3001.5482 在上文中,我们不建议使用set_drive命令而是使用set_driving_cell命令,这是一个描述输入端口驱动能力更精确的方法。因为大多数情况下,只有库单元的设计者熟悉单元门内部
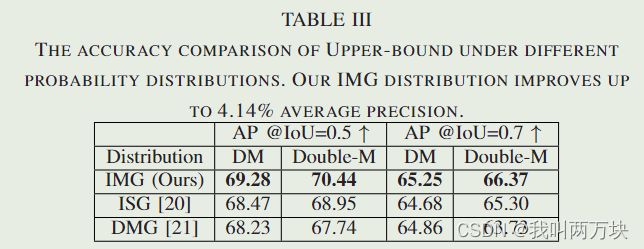
【论文解读】Uncertainty Quantification of Collaborative Detection for Self-Driving
Uncertainty Quantification of Collaborative Detection for Self-Driving 摘要引言方法问题定义方法概览Double-M 实验结论 摘要 在联网和自动驾驶汽车(CAVs)之间共享信息从根本上提高了自动驾驶协同目标检测的性能。然而,由于实际挑战,CAV 在目标检测方面仍然存在不确定性,这将影响自动驾驶中的后续模块,例
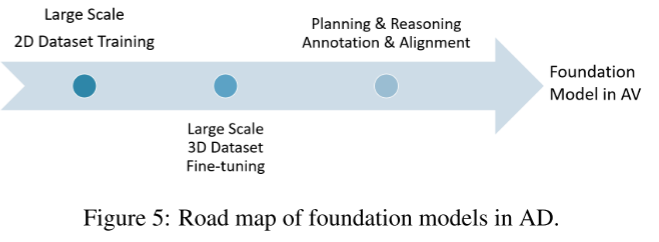
A Survey for Foundation Models in Autonomous Driving
摘要 **基础模型(foundation models)**的出现彻底改变了自然语言处理和计算机视觉领域,为它们在自动驾驶(AD)中的应用铺平了道路。本调查对40多篇研究论文进行了全面回顾,展示了基础模型在增强AD中的作用。大型语言模型有助于AD中的规划和模拟,特别是通过它们在推理,代码生成和翻译方面的熟练程度。与此同时,视觉基础模型越来越多地适用于关键任务,如3D物体检测和跟踪,以及为模拟和测

环境配置:Udacity的Self-Driving项目安装运行
前言 Udacity的自动驾驶工程师纳米学位项目(Self-Driving Car Engineer Nanodegree Program)是一项面向学习者的前沿技术项目,旨在提供全面的自动驾驶工程师培训。该项目由Udacity与自动驾驶领域的领先公司和专业人士合作开发,涵盖了从传感器融合到深度学习等多个方面的内容。本篇内容将介绍此项目如何在自己的环境中进行配置。希望大家通过这个项目,能够在自动

Scene Understanding for Autonomous Driving Using Visual Question Answering
摘要 本文研究了dot-products存在于自我注意机制作为自动驾驶的可解释性技术的可行性。一个视觉问题识别(VQA)框架实现了三种类型的问题有关的道路标志和交通灯的存在或不存在。该模型进行评估的编码单模态和多模态编码:标准版本和修改版本的学习跨模态编码器表示从变压器(LXMERT)框架。我们提出的两个模型架构的问答任务的数值结果,与整体准确率分别为79.7%和78.5%,整体F1分数分别为0

ROS 进阶学习笔记(14) - About driving your iRobot Roomba/Create
ROS 进阶学习笔记(14) - About driving your iRobot Roomba/Create ---------------- There are several iRobot ROOMBA/CREATE drivers in ROS community, by May 2016, the newest one sholuld be thecreate_autonomy
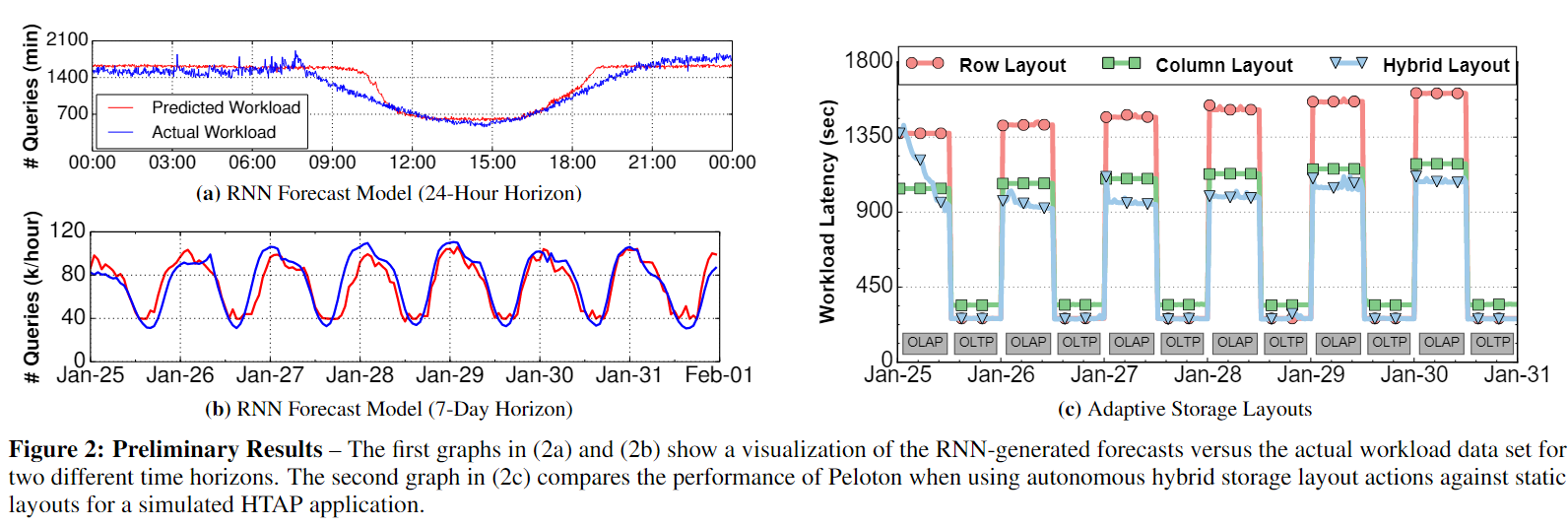
【论文阅读 CIDR17】Self-Driving Database Management Systems
Self-Driving Database Management Systems MySummary ABSTRACT 之前的advisory tools来帮助DBA处理系统调优和物理设计的各个方面,都仍然需要人类对数据库的任何更改做出最终决定,并且是在问题发生后修复问题的反动措施reactionary measures 。 An truly “self-driving” database
【翻译转载】What is a Self-Driving Database Management System
What is a Self-Driving Database Management System? cs.cmu.edu/~pavlo/blog/2018/04/what-is-a-self-driving-database-management-system.html#footnote-cidr 概述 一些组织和个人错误地将他们的系统标记为“自动驾驶”。真正的自动驾驶数据库管理系统(DB

Adversarial Objects Against LiDAR-Based Autonomous Driving Systems
Adversarial Objects Against LiDAR-Based Autonomous Driving Systems 文章目录 Adversarial Objects Against LiDAR-Based Autonomous Driving Systems背景LiADAR-Adv内容LiADV-based detection流程LiDARPreprocessing ph

PhysGAN: Generating Physical-World-Resilient Adversarial Examples for Autonomous Driving
PhysGAN: Generating Physical-World-Resilient Adversarial Examples for Autonomous Driving 本文收录于CVPR 2020 文章目录 PhysGAN: Generating Physical-World-Resilient Adversarial Examples for Autonomous Drivi

【论文笔记】NeuRAD: Neural Rendering for Autonomous Driving
原文链接:https://arxiv.org/abs/2311.15260 1. 引言 神经辐射场(NeRF)应用在自动驾驶中,可以创建可编辑的场景数字克隆(可自由编辑视角和场景物体),以进行仿真。但目前的方法或者需要大量的训练时间,或者对传感器的建模过于简单(导致仿真和真实数据的间隙),或者性能较低。 本文提出NeuRAD,一种可编辑的新视图合成模型。该方法可以处理大型自动驾驶场景,建模了
【论文笔记】NeuRAD: Neural Rendering for Autonomous Driving
原文链接:https://arxiv.org/abs/2311.15260 1. 引言 神经辐射场(NeRF)应用在自动驾驶中,可以创建可编辑的场景数字克隆(可自由编辑视角和场景物体),以进行仿真。但目前的方法或者需要大量的训练时间,或者对传感器的建模过于简单(导致仿真和真实数据的间隙),或者性能较低。 本文提出NeuRAD,一种可编辑的新视图合成模型。该方法可以处理大型自动驾驶场景,建模了
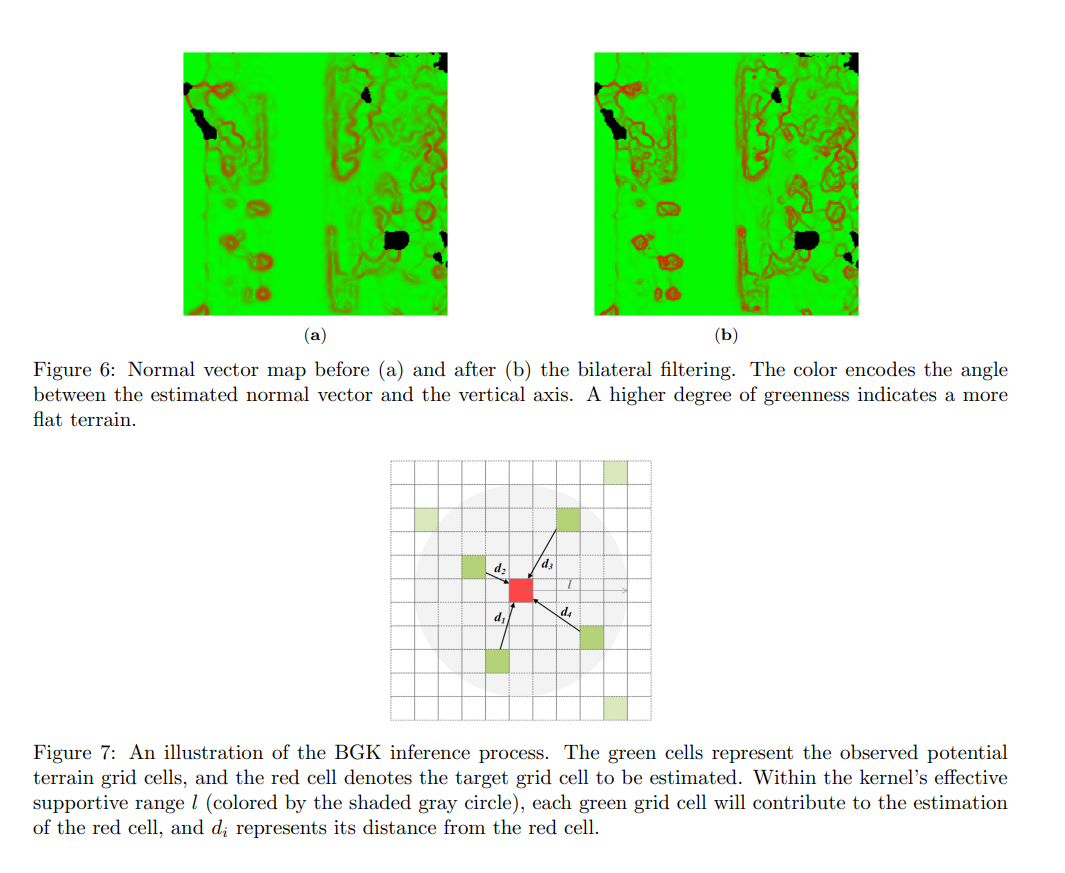
经典文献阅读之--Traversability Analysis for Autonomous Driving...(Lidar复杂环境中的可通行分析)
0. 简介 对于自动驾驶来说,复杂环境的可通行是最需要关注的任务。《Traversability Analysis for Autonomous Driving in Complex Environment: A LiDAR-based Terrain Modeling Approach》一文提出了用激光雷达完成建图的工作,其可以输出稳定、完整和精确的地形建模以及可通行分析结果。由于地形是环境的
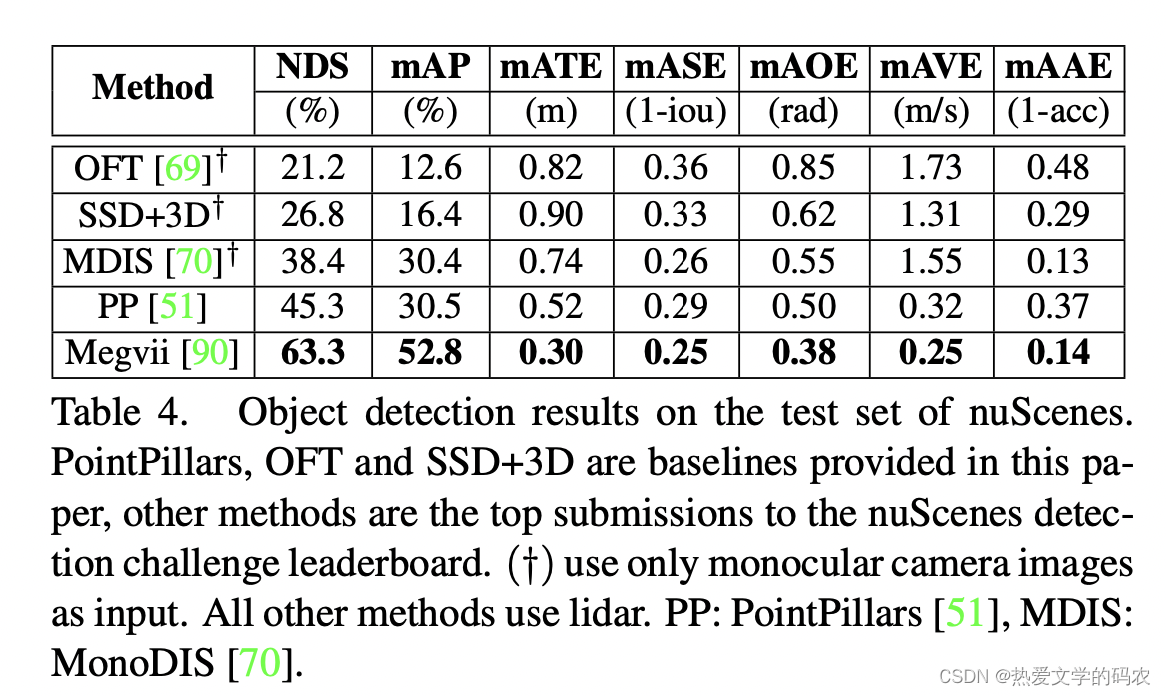
19:nuScenes: A multimodal dataset for autonomous driving
1.介绍 目标的鲁棒检测与跟踪是自动驾驶汽车技术发展的关键。基于图像的基准数据集推动了计算机视觉任务的发展,如目标检测、跟踪和环境中代理的分割。然而,大多数自动驾驶汽车都配有摄像头和测距传感器,如激光雷达和雷达。随着基于机器学习的检测和跟踪方法变得越来越流行,有必要在包含距离传感器数据和图像的数据集上训练和评估这些方法。在这项工作中,我们展示了nuTonomy场景(nuScenes),这是
高翔:《自动驾驶与机器人中的SLAM技术 》-Slam_in_autonomous_driving 编译过程中遇到的问题
使用的环境是ubuntu20.04 问题1.安装g2o没有问题,不过在编译整个项目工程时候报错: ”openmp_mutex.h: 30:10: fatal error: g2o/config.h: No such file or directory“: 解决办法: 只需要将/thirdparty/g2o/build/g2o下的config.h放到/thirdparty/g2o下: 问题
