enables专题
论文《Visual Point Cloud Forecasting enables Scalable Autonomous Driving》详细解析
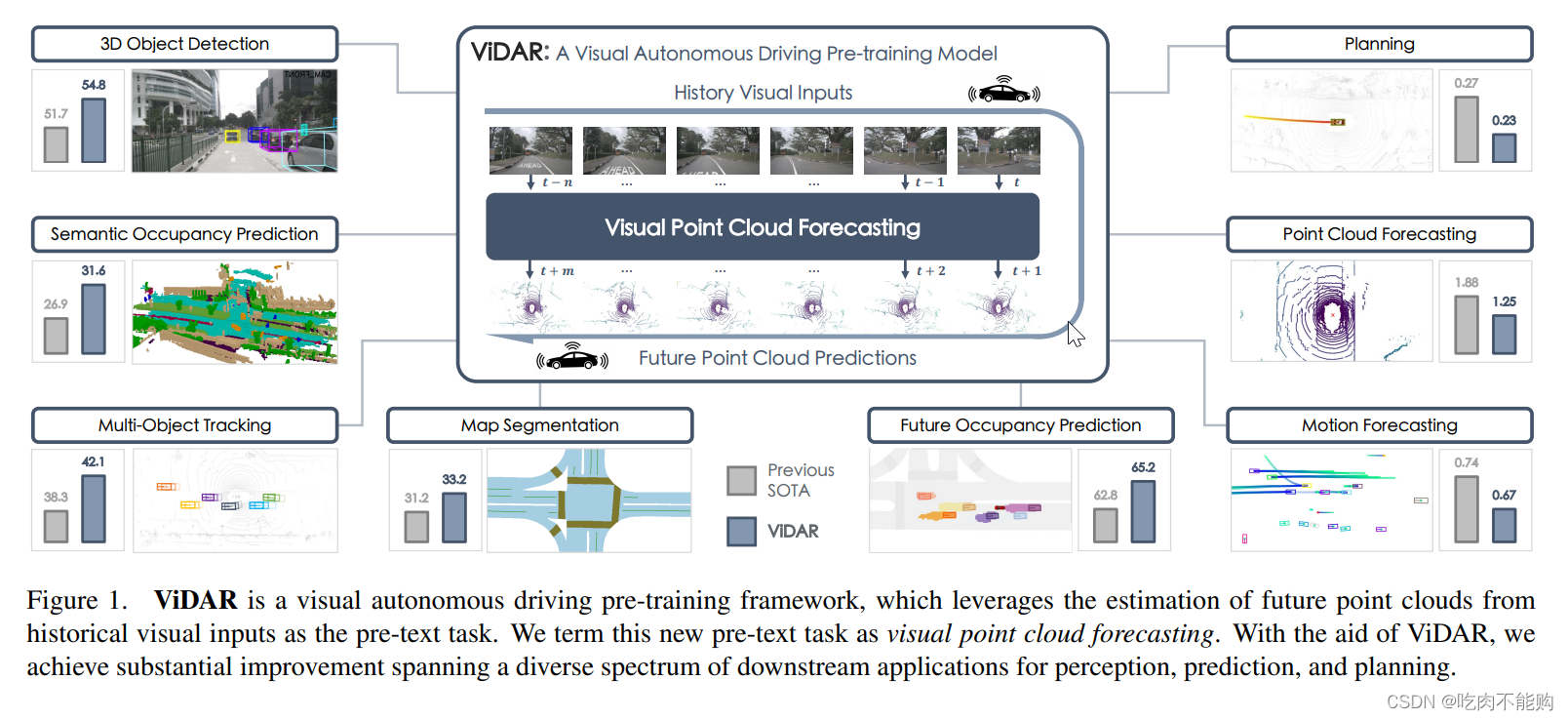
论文《Visual Point Cloud Forecasting enables Scalable Autonomous Driving》详细解析 摘要 该论文提出了一种新的预训练任务,称为“视觉点云预测”(Visual Point Cloud Forecasting),从历史视觉输入中预测未来的点云。论文介绍了ViDAR模型,通过这种方法显著提高了多种下游任务(如感知、预测和规划)的性能。

Sequential Modeling Enables Scalable Learning for Large Vision Models
目录 一、论文速读 1.1 摘要 1.2 论文概要总结 二、论文精度 2.1 论文试图解决什么问题? 2.2 论文中提到的解决方案之关键是什么? 2.3 论文提出的架构和损失函数是什么? 2.4 用于定量评估的数据集是什么?代码有没有开源? 2.5 这篇论文到底有什么贡献? 2.6 下一步呢?有什么工作可以继续深入? 一、论文速读 1.1 摘要 本

【PCIe】First/Last DW Byte Enables 介绍
🔥点击查看精选 PCIe 系列文章🔥 🔥点击进入【芯片设计验证】社区,查看更多精彩内容🔥 📢 声明: 🥭 作者主页:【MangoPapa的CSDN主页】。⚠️ 本文首发于CSDN,转载或引用请注明出处【https://mangopapa.blog.csdn.net/article/details/129265044】。⚠️ 本文目的为 个人学习记录 及 知识分享。