autonomous专题

【Agent】Agent Q: Advanced Reasoning and Learning for Autonomous AI Agents
1、问题背景 传统的训练Agent方法是在静态数据集上进行监督预训练,这种方式对于要求Agent能够自主的在动态环境中可进行复杂决策的能力存在不足。例如,要求Agent在web导航等动态设置中执行复杂决策。 现有的方式是用高质量数据进行微调来增强Agent在动态环境中的决策能力,但这往往会出现复合错误和有限的探测数据,最终导致结果不够理想。 2、提出方法 Agent Q 框架将蒙特卡洛树搜
【论文解读】Planning-oriented Autonomous Driving
UniAD 摘要引言方法Perception: Tracking and MappingPrediction: Motion ForecastingPrediction: Occupancy PredictionPlanningLearning 实验结论 摘要 现代自动驾驶系统的特征是按顺序的模块化任务,即感知、预测和规划。为了执行广泛多样的任务并实现高级智能,现代方法要么为单个

轨迹规划论文阅读20220109-A Real-Time Motion Planner with Trajectory Optimization for Autonomous Vehicles
0、摘要 提出了一种基于轨迹优化的高效实时自动驾驶运动规划方法。将轨迹空间离散化->利用cost functions 来找到最佳轨迹。 引[CSDN1]: 规划器首先把规划空间离散化 ,并根据一组代价函数搜索最优轨迹,然后对轨迹的path和speed进行迭代优化。文中提出了一种“post-optimization”的方法,可以弥补离散化难以求出最优解的问题(离散越密,越接近最优解),
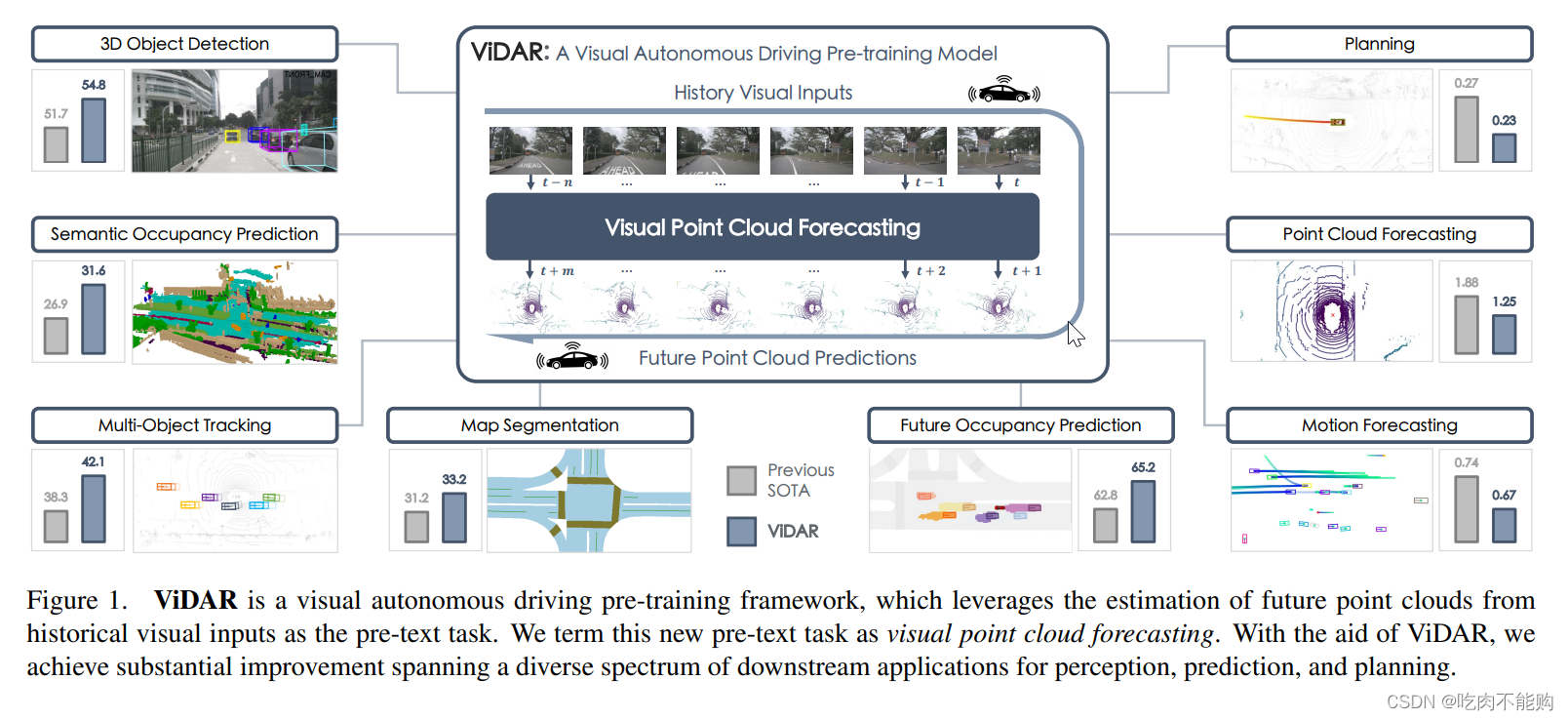
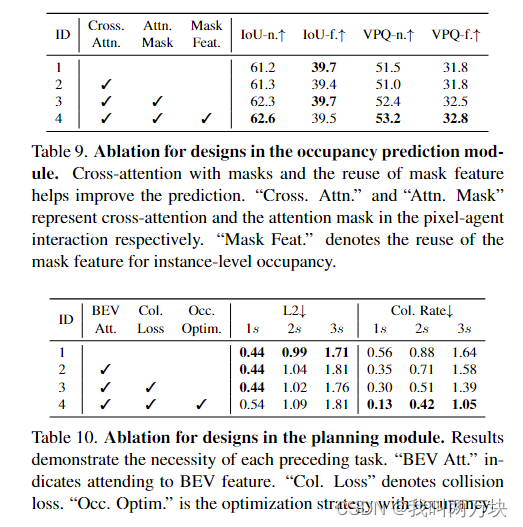
论文《Visual Point Cloud Forecasting enables Scalable Autonomous Driving》详细解析
论文《Visual Point Cloud Forecasting enables Scalable Autonomous Driving》详细解析 摘要 该论文提出了一种新的预训练任务,称为“视觉点云预测”(Visual Point Cloud Forecasting),从历史视觉输入中预测未来的点云。论文介绍了ViDAR模型,通过这种方法显著提高了多种下游任务(如感知、预测和规划)的性能。
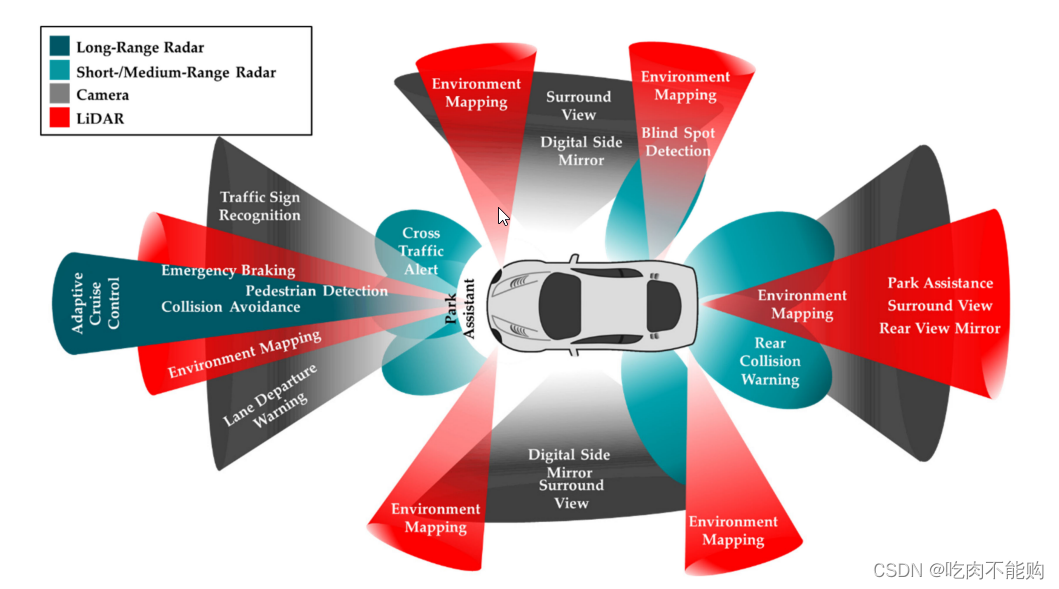
论文《Sensor and Sensor Fusion Technology in Autonomous Vehicles: A Review》详细解析
论文《Sensor and Sensor Fusion Technology in Autonomous Vehicles: A Review》详细解析 摘要 该论文对自动驾驶汽车中的传感器和传感器融合技术进行了全面回顾。它评估了各种传感器(如相机、LiDAR、雷达)的能力和技术性能,并讨论了多传感器校准的重要性和现有的开源校准包。论文还总结了主要的传感器融合方法和用于自动驾驶环境中的障碍物检

AutoNeRF:Training Implicit Scene Representations with Autonomous Agents
论文概述 《AutoNeRF》是由Pierre Marza等人撰写的一篇研究论文,旨在通过自主智能体收集数据来训练隐式场景表示(如神经辐射场,NeRF)。传统的NeRF训练通常需要人为的数据收集,而AutoNeRF则提出了一种使用自主智能体高效探索未知环境,并利用这些经验自动构建隐式地图表示的方法。本文比较了不同的探索策略,包括手工设计的基于前沿的探索、端到端方法以及由高层规
(读书笔记-大模型) LLM Powered Autonomous Agents
目录 智能体系统的概念 规划组件 记忆组件 工具组件 案例研究 智能体系统的概念 在大语言模型(LLM)赋能的自主智能体系统中,LLM 充当了智能体的大脑,其三个关键组件分别如下: 首先是规划,它又分为以下内容: 子目标和分解。智能体将大型任务分解为更小、可管理的子目标,从而高效处理复杂的任务; 反思和完善:智能体可以对过去的行为展开自我批评和自我反思,从错误中吸
![[阅读笔记25][WebArena]A Realistic Web Environment for Building Autonomous Agents](https://img-blog.csdnimg.cn/direct/9f1571090d7449c89210c32d4d4f970e.png)
[阅读笔记25][WebArena]A Realistic Web Environment for Building Autonomous Agents
这篇论文提出了WebArena这个环境与测试基准,在24年1月发表。 之前的agent都是在一些简化过的合成环境中测试的,这会导致与现实场景脱节。这篇论文构建了一个高度逼真、可复现的环境。该环境涉及四个领域:电子商务、论坛讨论、软件开发和内容管理。基于环境又引入了一组基准任务,用来评估任务完成的正确性,这些任务可以模拟人类在互联网上的日常行为。另外该基准被证明是具有挑战性的,GPT-
3D Object Detection for Autonomous Driving: A Comprehensive Survey文献阅读
目录 简言 文献地址: 重要网址(该项目持续更新中) 摘要 1、介绍 2、基础概念 2.1 3D object detection 2.2 Datasets 2.3 Evaluation metrics 2.3.1 评估指标类-1 2.3.2 评估指标类-2 2.3.3 评估指标对比 3、基于Lidar的三维目标检测 3.1 基于数据表示的 3D 检测方
<REAL-TIME TRAFFIC OBJECT DETCTION FOR AUTONOMOUS DRIVING>论文阅读
Abstract 随着计算机视觉的最新进展,自动驾驶迟早成为现代社会的一部分,然而,仍有大量的问题需要解决。尽管现代计算机视觉技术展现了优越的性能,他们倾向于将精度优先于效率,这是实时应用的一个重要方面。大型目标检测模型通常需要更高的计算能力,这是通过使用更复杂的机载硬件来实现的,对于自动驾驶来说,这些要求转化为燃料成本的增加,并最终导致里程的减少,此外,尽管有计算需求,但现

Ubuntu18.04 中编译 TI 官方的ros驱动包中 autonomous_robotics_ros 包所存在的问题及解决方案
环境: 安装有 ROS 系统的 Ubuntu18.04 环境,并且已将 TI 官方的毫米波雷达 ROS 驱动下载到Ubuntu18.04系统中,如需获取此代码请点击此链接根据教程下载即可。 代码下载链接:TI IWR6843ISK ROS驱动程序搭建-CSDN博客 问题1: 编译时出现没有 turtlebot_msgs 安装包的提示 解决方案: 将下面链接中的代码克隆或者下载z
RGB_IR多模态融合文章MFNet: Towards Real-Time Semantic Segmentation for Autonomous Vehicles with Multi-Spect
MFNet: Towards Real-Time Semantic Segmentation for Autonomous Vehicles with Multi-Spectral Scenes code pytorch 摘要 本文研究了基于新的RGB-Thermal数据集的自动驾驶车辆街景图像的语义分割,本文还对此进行了介绍。对自动驾驶车辆的兴趣日益增加,使得语义分割适应于自动驾驶系统。然
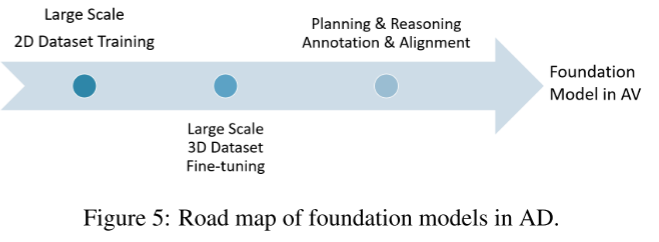
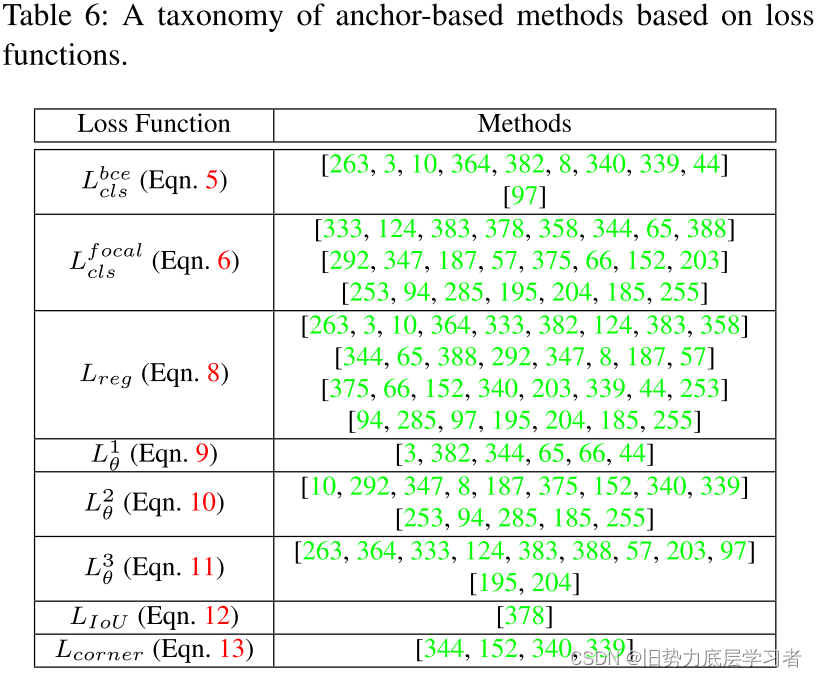
A Survey for Foundation Models in Autonomous Driving
摘要 **基础模型(foundation models)**的出现彻底改变了自然语言处理和计算机视觉领域,为它们在自动驾驶(AD)中的应用铺平了道路。本调查对40多篇研究论文进行了全面回顾,展示了基础模型在增强AD中的作用。大型语言模型有助于AD中的规划和模拟,特别是通过它们在推理,代码生成和翻译方面的熟练程度。与此同时,视觉基础模型越来越多地适用于关键任务,如3D物体检测和跟踪,以及为模拟和测
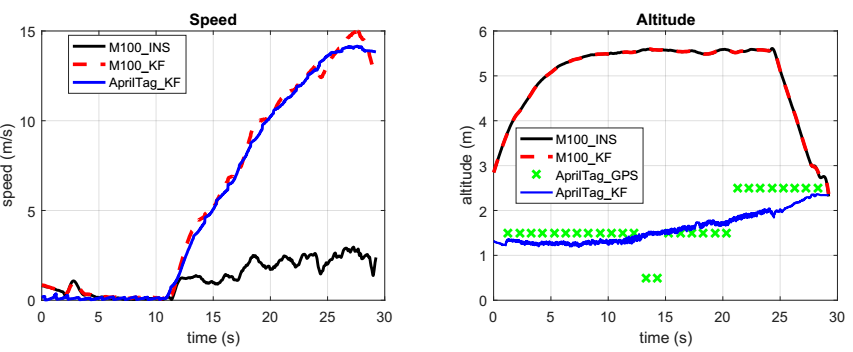
Autonomous Landing of a Multirotor Micro Air Vehicle on a High Velocity Ground Vehicle论文翻译
说明:本文为本人原创翻译,除了对原文进行翻译,还对部分知识点进行了拓展。未经允许,不得转载。 这篇论文在百度学术、谷歌学术等平台很容易就找到了,链接就不提供了。如果有翻译错误或者理解错误的地方,恳请看到的人及时指出,万分感激。 多旋翼飞行器在高速移动的地面交通工具上的自主降落 摘要:虽然自主多旋翼微型飞行器(MAV)对于某些需要固定悬停飞行能力的任
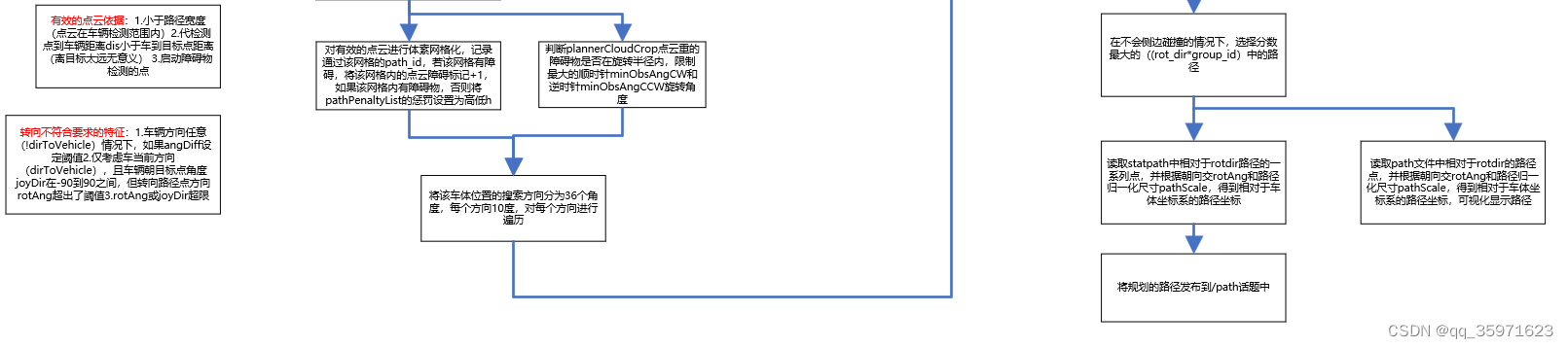
Autonomous_Exploration_Development_Environment的local_planner学习笔记
1.程序下载网址:https://github.com/HongbiaoZ/autonomous_exploration_development_environment 2.相关参考资料: https://blog.csdn.net/lizjiwei/article/details/124437157 Matlab用采样的离散点做前向模拟三次样条生成路径点-CSDN博客 CMU团队开源的局

【CMU-自主导航与规划】Autonomous Exploration Development Environment 配置与运行
官方文档:https://www.cmu-exploration.com/ 一、安装与配置: 适用版本: Ubuntu 18.04 ROS Melodic and Ubuntu 20.04 with ROS Noetic. 如果使用 Ubuntu 22.04 with ROS2 Humble, 则需要配置ROS2【https://drive.google.com/file/d/1a01RSrP

Scene Understanding for Autonomous Driving Using Visual Question Answering
摘要 本文研究了dot-products存在于自我注意机制作为自动驾驶的可解释性技术的可行性。一个视觉问题识别(VQA)框架实现了三种类型的问题有关的道路标志和交通灯的存在或不存在。该模型进行评估的编码单模态和多模态编码:标准版本和修改版本的学习跨模态编码器表示从变压器(LXMERT)框架。我们提出的两个模型架构的问答任务的数值结果,与整体准确率分别为79.7%和78.5%,整体F1分数分别为0
【论文精读】A Survey on Large Language Model based Autonomous Agents
A Survey on Large Language Model based Autonomous Agents 前言Abstract1 Introduction2 LLM-based Autonomous Agent Construction2.1 Agent Architecture Design2.1.1 Profiling Module2.1.2 Memory ModuleMemor

Adversarial Objects Against LiDAR-Based Autonomous Driving Systems
Adversarial Objects Against LiDAR-Based Autonomous Driving Systems 文章目录 Adversarial Objects Against LiDAR-Based Autonomous Driving Systems背景LiADAR-Adv内容LiADV-based detection流程LiDARPreprocessing ph

PhysGAN: Generating Physical-World-Resilient Adversarial Examples for Autonomous Driving
PhysGAN: Generating Physical-World-Resilient Adversarial Examples for Autonomous Driving 本文收录于CVPR 2020 文章目录 PhysGAN: Generating Physical-World-Resilient Adversarial Examples for Autonomous Drivi

【论文笔记】NeuRAD: Neural Rendering for Autonomous Driving
原文链接:https://arxiv.org/abs/2311.15260 1. 引言 神经辐射场(NeRF)应用在自动驾驶中,可以创建可编辑的场景数字克隆(可自由编辑视角和场景物体),以进行仿真。但目前的方法或者需要大量的训练时间,或者对传感器的建模过于简单(导致仿真和真实数据的间隙),或者性能较低。 本文提出NeuRAD,一种可编辑的新视图合成模型。该方法可以处理大型自动驾驶场景,建模了
【论文笔记】NeuRAD: Neural Rendering for Autonomous Driving
原文链接:https://arxiv.org/abs/2311.15260 1. 引言 神经辐射场(NeRF)应用在自动驾驶中,可以创建可编辑的场景数字克隆(可自由编辑视角和场景物体),以进行仿真。但目前的方法或者需要大量的训练时间,或者对传感器的建模过于简单(导致仿真和真实数据的间隙),或者性能较低。 本文提出NeuRAD,一种可编辑的新视图合成模型。该方法可以处理大型自动驾驶场景,建模了
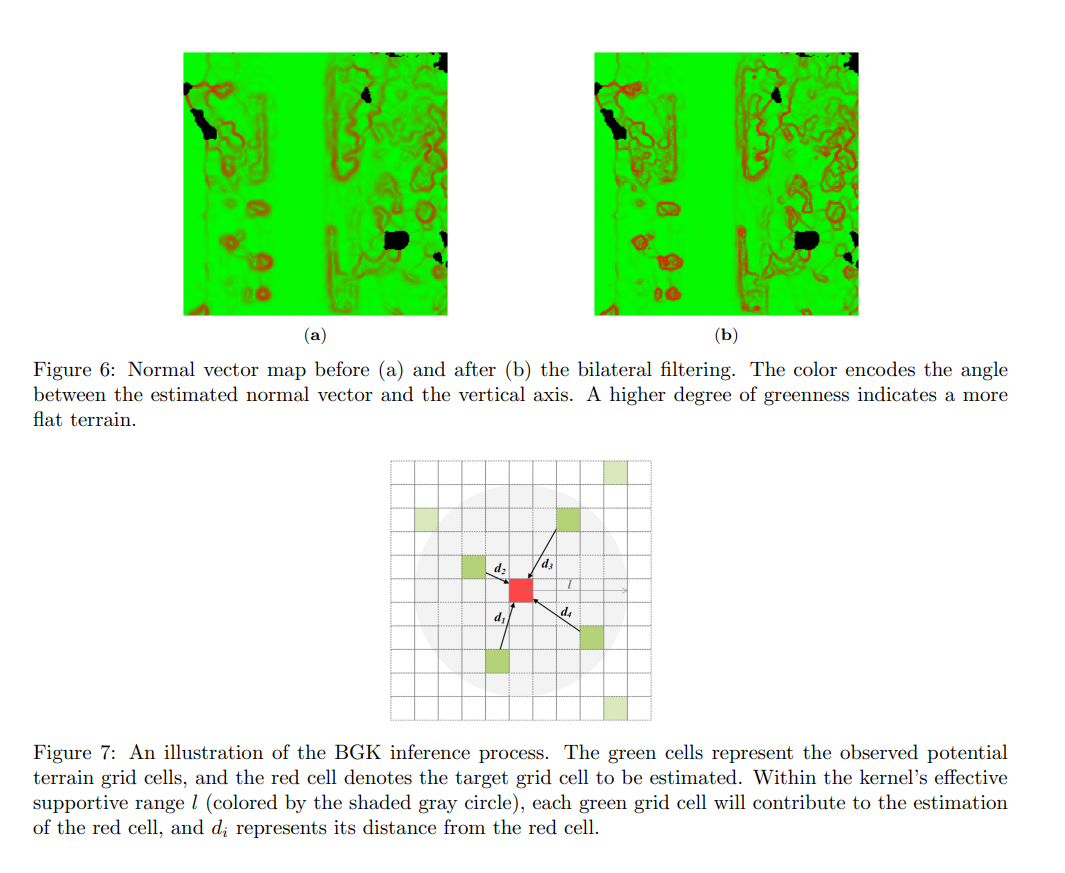
经典文献阅读之--Traversability Analysis for Autonomous Driving...(Lidar复杂环境中的可通行分析)
0. 简介 对于自动驾驶来说,复杂环境的可通行是最需要关注的任务。《Traversability Analysis for Autonomous Driving in Complex Environment: A LiDAR-based Terrain Modeling Approach》一文提出了用激光雷达完成建图的工作,其可以输出稳定、完整和精确的地形建模以及可通行分析结果。由于地形是环境的

LLM自动进行数据分析-论文《Data-Copilot: Bridging Billions of Data and Humans with Autonomous Workflow》笔记
文章目录 概要接口设计Interface DesignExplore Data by Self-RequestInterface definitionInterface MergingInterface Implementation 接口调度Interface DispatchIntent AnalysisPlanning workflowMulti-form Output 总结参考资料
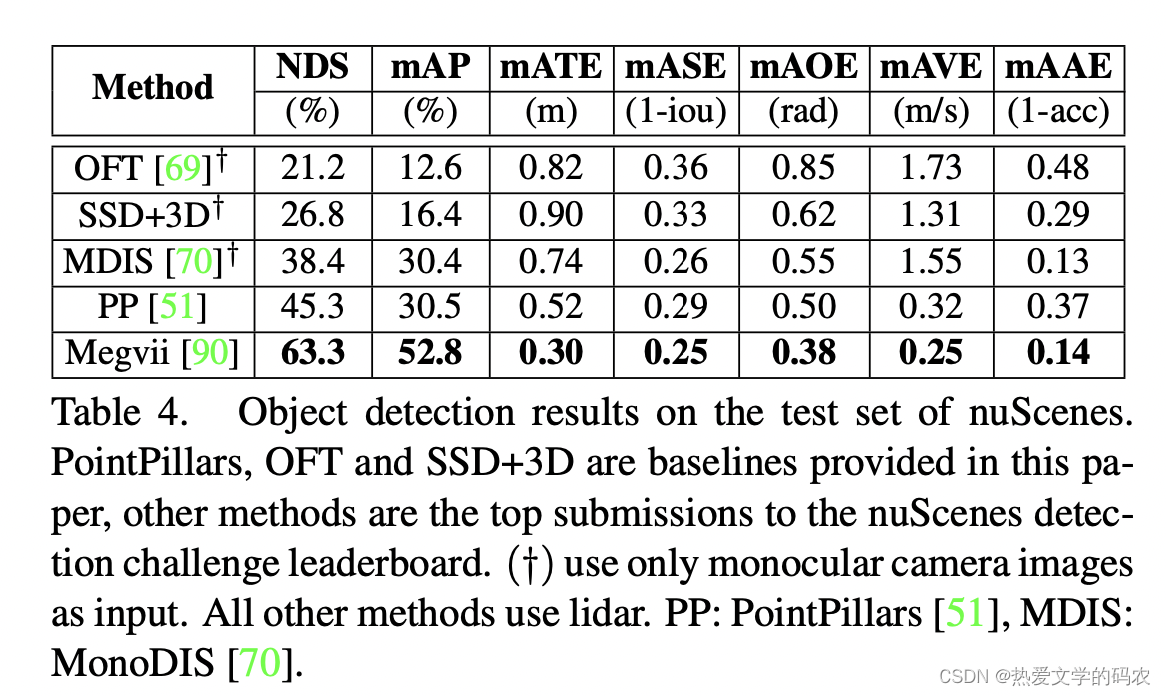
19:nuScenes: A multimodal dataset for autonomous driving
1.介绍 目标的鲁棒检测与跟踪是自动驾驶汽车技术发展的关键。基于图像的基准数据集推动了计算机视觉任务的发展,如目标检测、跟踪和环境中代理的分割。然而,大多数自动驾驶汽车都配有摄像头和测距传感器,如激光雷达和雷达。随着基于机器学习的检测和跟踪方法变得越来越流行,有必要在包含距离传感器数据和图像的数据集上训练和评估这些方法。在这项工作中,我们展示了nuTonomy场景(nuScenes),这是
高翔:《自动驾驶与机器人中的SLAM技术 》-Slam_in_autonomous_driving 编译过程中遇到的问题
使用的环境是ubuntu20.04 问题1.安装g2o没有问题,不过在编译整个项目工程时候报错: ”openmp_mutex.h: 30:10: fatal error: g2o/config.h: No such file or directory“: 解决办法: 只需要将/thirdparty/g2o/build/g2o下的config.h放到/thirdparty/g2o下: 问题