本文主要是介绍论文《Sensor and Sensor Fusion Technology in Autonomous Vehicles: A Review》详细解析,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
论文《Sensor and Sensor Fusion Technology in Autonomous Vehicles: A Review》详细解析
摘要
该论文对自动驾驶汽车中的传感器和传感器融合技术进行了全面回顾。它评估了各种传感器(如相机、LiDAR、雷达)的能力和技术性能,并讨论了多传感器校准的重要性和现有的开源校准包。论文还总结了主要的传感器融合方法和用于自动驾驶环境中的障碍物检测算法,并提出了未来研究方向。
介绍
自动驾驶技术迅速发展,多传感器集成对于车辆周围环境的感知至关重要。传感器校准是自动驾驶系统的基础,必须正确执行以确保传感器融合和障碍物检测的准确性。本文概述了三类主要的传感器校准方法,并回顾了现有的开源校准包及其与商用传感器的兼容性。此外,还总结了传感器融合的方法和算法,特别是在障碍物检测中的应用。
传感器技术
-
相机:
- 相机是最常用的感知技术之一,能够提供高分辨率的图像和视频,包含颜色和纹理信息。单目相机和双目相机(立体相机)常用于自动驾驶中。
- 立体相机通过计算视差图生成深度图,模仿动物的深度感知。
- 常见的相机还包括鱼眼相机,提供360度视野,但需要校正几何失真。
-
LiDAR:
- LiDAR通过发射激光脉冲并测量其反射时间来生成周围环境的3D表示(点云)。
- LiDAR传感器分为1D、2D和3D三种,3D LiDAR在自动驾驶中最为常用,能够提供高分辨率的点云数据。
- 机械LiDAR和固态LiDAR是两种主要类型,前者使用旋转透镜实现360度扫描,后者则更可靠且成本较低。
-
雷达:
- 雷达通过发射电磁波并接收目标反射波来测量目标的距离和相对速度。
- 雷达不受恶劣天气和光照条件的影响,但在分辨静止物体和金属物体方面存在挑战。
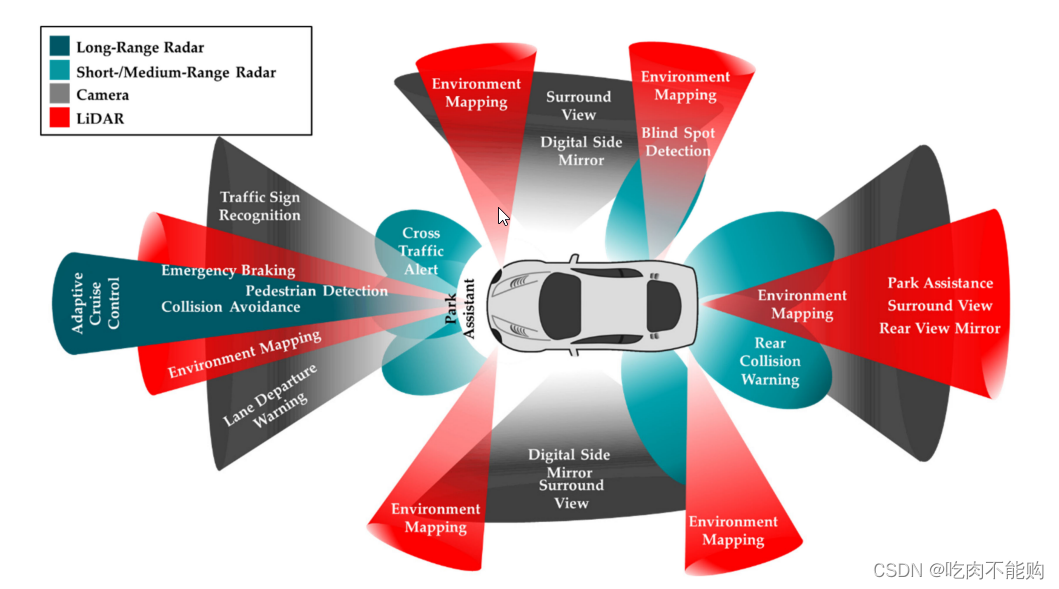
- 自动驾驶中常用短程、中程和长程雷达,分别用于停车辅助、侧面/后侧碰撞避免和自适应巡航控制。
传感器校准和融合
-
校准:
- 内参校准:估计传感器的内部参数,如相机的焦距、失真参数等,以校正系统性误差。
- 外参校准:估计传感器之间的相对位置和姿态,确保不同传感器的数据可以正确对齐。
- 时间校准:确保不同传感器的数据在时间上同步。
-
传感器融合:
- 高级融合、低级融合和中级融合是三种主要的融合方法。
- 高级融合:在决策层进行数据融合。
- 低级融合:在传感器数据层进行直接融合。
- 中级融合:在特征层进行融合,结合多种传感器的数据特征。
实验与结果
该论文回顾了现有的传感器技术和融合方法,并提出了在不同环境和条件下的传感器性能比较。文中还讨论了当前传感器融合面临的挑战,如数据同步、计算复杂性等,并提出了未来的研究方向。
结论
本文提供了对自动驾驶中传感器技术和传感器融合方法的全面回顾,强调了传感器校准的重要性,并提出了未来研究的潜在方向。这些研究对于提升自动驾驶系统的安全性和可靠性具有重要意义。
这篇关于论文《Sensor and Sensor Fusion Technology in Autonomous Vehicles: A Review》详细解析的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





