vehicles专题
跟《经济学人》学英文:2024年6月15日这期 Chinese electric vehicles (EVs)
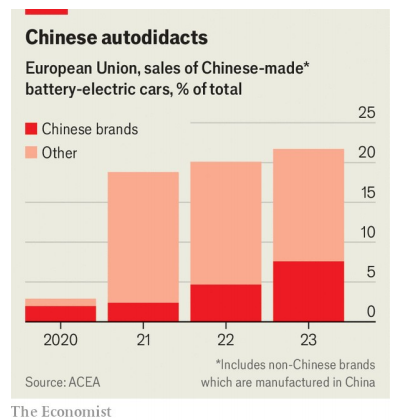
The EU hits China’s carmakers with hefty new tariffs Duties will only hold them back for a while 欧盟对中国汽车制造商征收高额新关税 hit: 对xxx施加 在句子"The EU hits China’s carmakers with hefty new tariffs"中,“hits”的意思是

轨迹规划论文阅读20220109-A Real-Time Motion Planner with Trajectory Optimization for Autonomous Vehicles
0、摘要 提出了一种基于轨迹优化的高效实时自动驾驶运动规划方法。将轨迹空间离散化->利用cost functions 来找到最佳轨迹。 引[CSDN1]: 规划器首先把规划空间离散化 ,并根据一组代价函数搜索最优轨迹,然后对轨迹的path和speed进行迭代优化。文中提出了一种“post-optimization”的方法,可以弥补离散化难以求出最优解的问题(离散越密,越接近最优解),
论文《Sensor and Sensor Fusion Technology in Autonomous Vehicles: A Review》详细解析
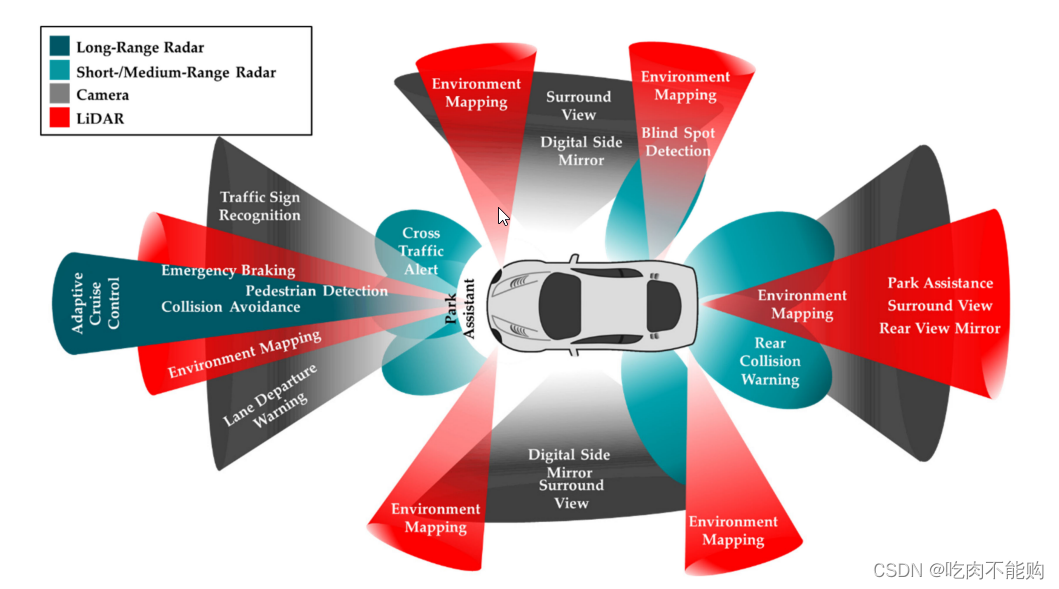
论文《Sensor and Sensor Fusion Technology in Autonomous Vehicles: A Review》详细解析 摘要 该论文对自动驾驶汽车中的传感器和传感器融合技术进行了全面回顾。它评估了各种传感器(如相机、LiDAR、雷达)的能力和技术性能,并讨论了多传感器校准的重要性和现有的开源校准包。论文还总结了主要的传感器融合方法和用于自动驾驶环境中的障碍物检
RGB_IR多模态融合文章MFNet: Towards Real-Time Semantic Segmentation for Autonomous Vehicles with Multi-Spect
MFNet: Towards Real-Time Semantic Segmentation for Autonomous Vehicles with Multi-Spectral Scenes code pytorch 摘要 本文研究了基于新的RGB-Thermal数据集的自动驾驶车辆街景图像的语义分割,本文还对此进行了介绍。对自动驾驶车辆的兴趣日益增加,使得语义分割适应于自动驾驶系统。然

【点云学习系列】之Fast segmentation of 3d point clouds for ground vehicles
简介 在上一篇文章pcl学习系列之GroundSegmentation滤波(一)通过使用pcl库来回归拟合平面进行地面点提取,本篇博文介绍一篇2010年的快速地面点云分割算法,该论文链接:Fast segmentation of 3d point clouds for ground vehicles,当然,作者还是很赞的开源了代码,传送门Github。当然,我也调试作者的代码,同时进行一定的
【阅读论文】Security issues in Internet of Vehicles (IoV): A comprehensive survey
文章目录 Security issues in Internet of Vehicles (IoV): A comprehensive surveyIntroductionIoV definition and backgroundVehicle networking standardsIntra-vehicle networkingInter-vehicle networking Vehic

Computer Vision for Autonomous Vehicles: Problems, Datasets and State-of-the-Art
摘抄自:http://mp.weixin.qq.com/s/YG5WcKejUi9QlQfjJQZ96w 摘要 本文通过提供有关自动驾驶计算机视觉这一主题的最新调查。调查既包括最为相关的历史资料,也包括识别、重建、运动估测、追踪、场景理解以及端到端学习等当前最先进的专业主题。为了完成这一目标,首先通过分类学对每个方法进行分类,接着在 KITTI、ISPRS、MOT 和 Cityscapes 等

论文解读--L-Shape Model Switching-Based Precise Motion Tracking of Moving Vehicles Using Laser Scanners
摘要 对移动物体的检测和跟踪是自动驾驶汽车最基本的功能之一。为了准确地估计运动物体的动态信息,激光扫描仪以其高精度的距离数据被广泛应用。然而,这些数据仅表示面对传感器的物体表面,并随着时间的推移改变物体的外观。这种更改会对估计的动态状态产生意外的跟踪错误。为了最小化外观变化引起的跟踪误差,本文提出了一种基于L-Shape模型切换的跟踪算法。该算法在实际交通实验中得到了验证,并通过
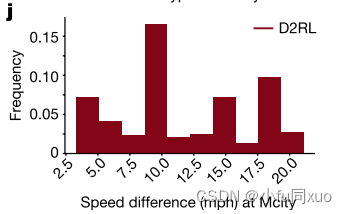
《Nature | Dense reinforcement learning for safety validation of autonomous vehicles》笔记
用于自动驾驶车辆安全验证的密集强化学习 论文标题: Dense reinforcement learning for safety validation of autonomous vehicles 论文链接: Dense reinforcement learning for safety validation of autonomous vehicles | Nature 2