fusion专题

VMware Fusion Pro 13 Mac版虚拟机 安装Win11系统教程
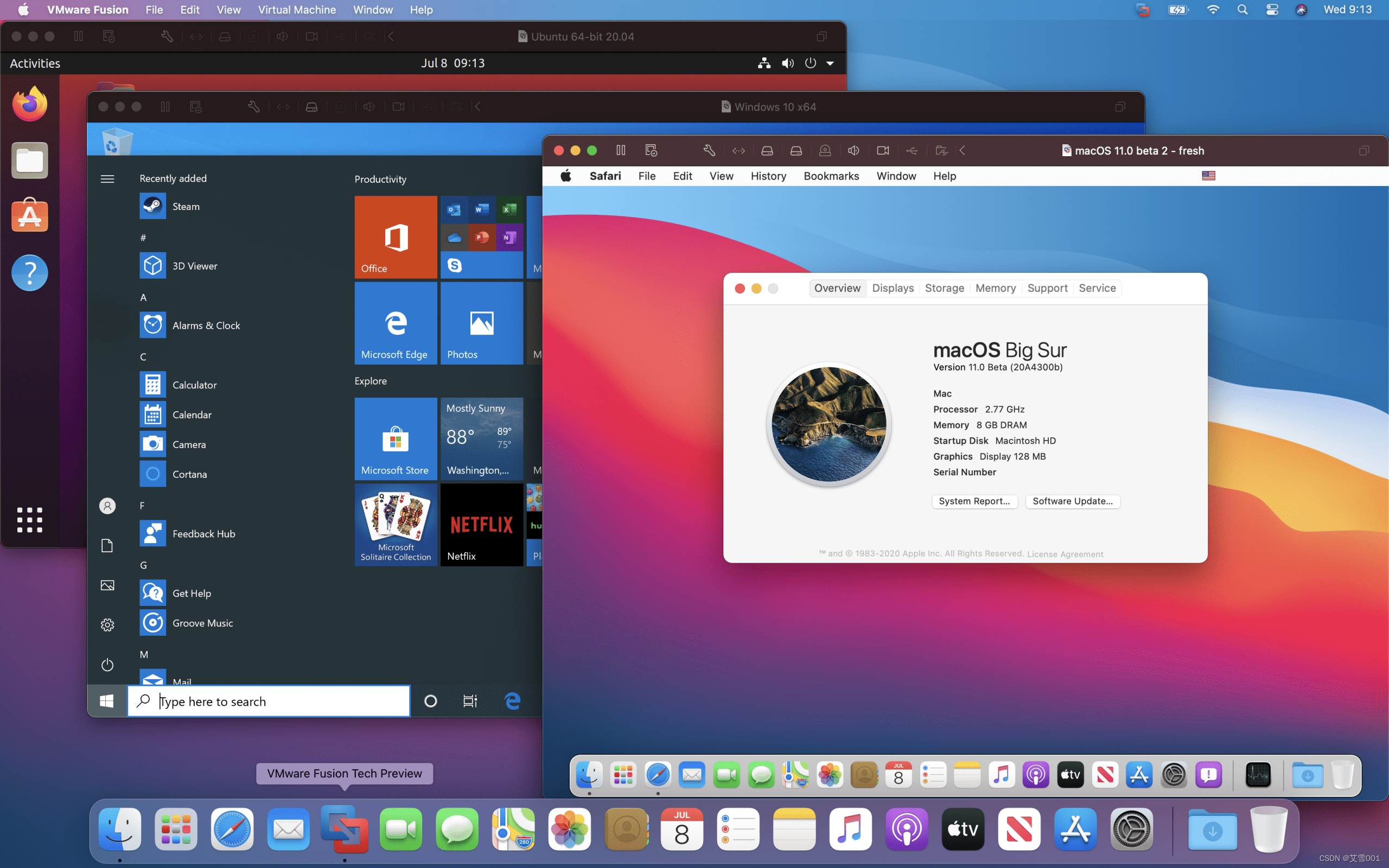
Mac分享吧 文章目录 Win11安装完成,软件打开效果一、VMware安装Windows11虚拟机1️⃣:准备镜像2️⃣:创建虚拟机3️⃣:虚拟机设置4️⃣:安装虚拟机5️⃣:解决连不上网问题 安装完成!!! Win11安装完成,软件打开效果 一、VMware安装Windows11虚拟机 首先确保自己的mac开启了网络共享。不然虚拟机连不上👀的 1️⃣:准备镜像

VMware Fusion Pro 13 for Mac虚拟机软件
Mac分享吧 文章目录 效果一、下载软件二、开始安装安装完成!!! 效果 一、下载软件 下载软件 地址:www.macfxb.cn 二、开始安装 安装完成!!!

Structure-Aware Feature Fusion for Unsupervised Domain Adaptation
Structure-Aware Feature Fusion for Unsupervised Domain Adaptation 摘要引言相关工作UDA中的分布匹配方法 Model 摘要 无监督域适应(Unsupervised Domain Adaptation,UDA)旨在从有标注的源域中学习并迁移通用特征到无任何标注的目标域。现有的方法仅对高层次的表示进行对齐,却没有利

VMware fusion下ubuntu(16)虚拟机编译安卓源码笔记
前两天刚刚编译成功了android源码,历尽九九八十一难。因为过程艰苦,不想就这么遗忘,所以写出来与大家共享,希望为后来者提供借鉴。 我开发的环境是mac os10.12.3,vmware fusion8.1.1,ubuntu16.04.2。 环境搭建: 关于vmware fusion的安装我就不想说什么了,因为实在太简单了。但是在安装ubuntu的时候一定要注意,创建好虚拟机以后首先要设置
Mac不连网怎么办,Mac上安装的VMware Fusion不连网怎么办(续篇)
昨天下午改了下以太网的IP然后点击应用(网络肯定是不能用的),再改回原来的IP地址后神奇般的好了,但好景不长 今天一早开机后,重新连接以太网网络一切正常可用,打开VMware Fusion也可以连网 解决方案: Mac端以太网连接,配置IPv4为手动,IP地址,子网掩码,路由器,DNS服务器设置根据所在网络自行配置即可,Wi-Fi就开着不要管了 VMware Fusion端,打开网络和共享

Mac不连网怎么办,Mac上安装的VMware Fusion不连网怎么办
这两天我的Mac mini抽风似得断网了,测试网线完好木有问题,试过重启、拔网线重连、修改以太网的配置均未成功,临时解决方案使用wifi上网 1、步骤: 打开Mac的偏好设置==>选择网络==>以太网(停用服务)==>选择Wi-Fi==>选择网络名称并输入密码==>打开Wi-Fi 酱紫Mac就可以临时用了,根本解决方案不晓得,有待挖掘 接下来就是VMware Fusion的问题了 之前网

论文阅读--Efficient Hybrid Zoom using Camera Fusion on Mobile Phones
这是谷歌影像团队 2023 年发表在 Siggraph Asia 上的一篇文章,主要介绍的是利用多摄融合的思路进行变焦。 单反相机因为卓越的硬件性能,可以非常方便的实现光学变焦。不过目前的智能手机,受制于物理空间的限制,还不能做到像单反一样的光学变焦。目前主流的智能手机,都是采用多摄的设计,一般来说一个主摄搭配一个长焦,为了实现主摄与长焦之间的变焦,目前都是采用数字变焦的方式,数字变焦相比于光学
BEV 中 multi-frame fusion 多侦融合(一)
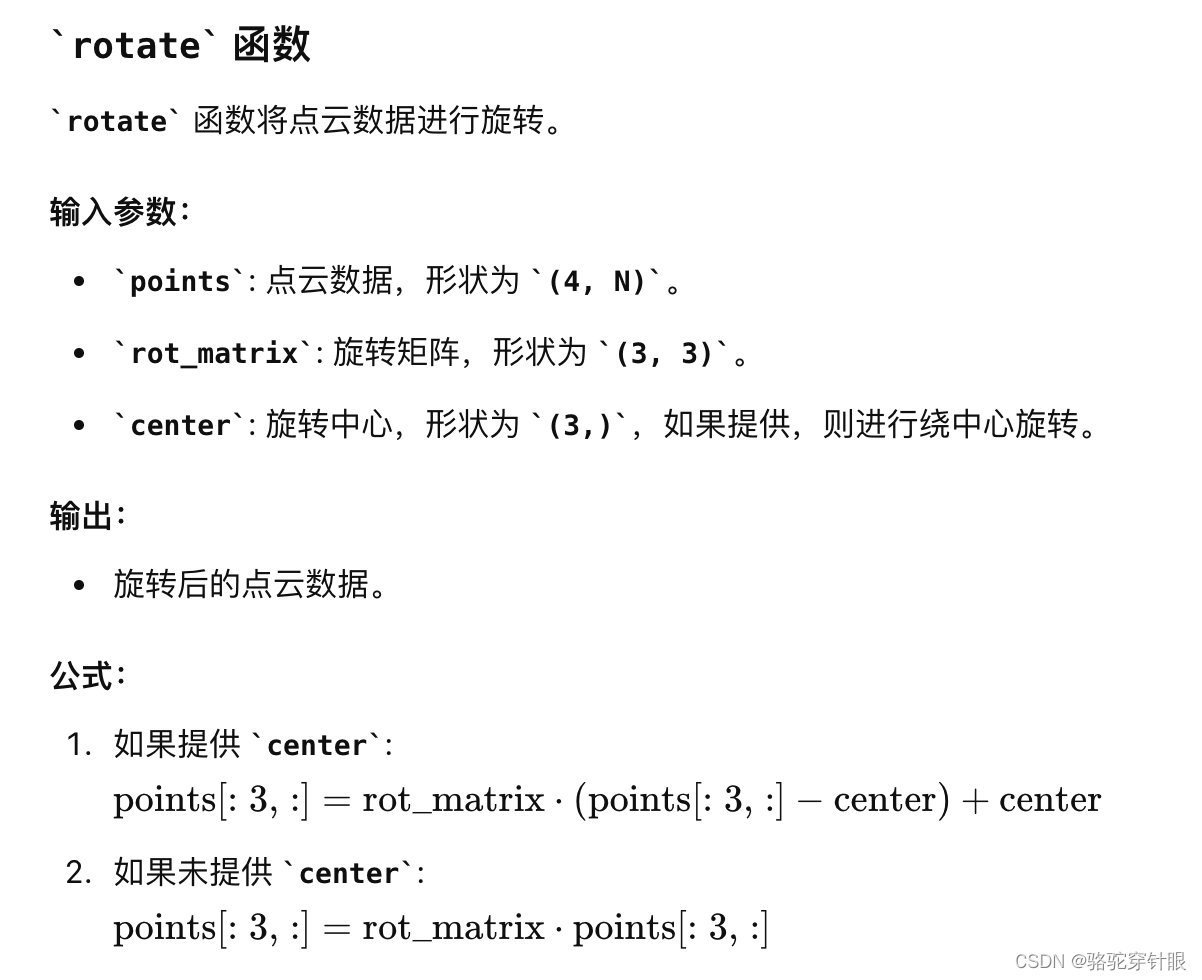
文章目录 参数设置align_dynamic_thing:为了将动态物体的点云数据从上一帧对齐到当前帧流程 旋转函数平移公式filter_points_in_ego:筛选出属于特定实例的点get_intermediate_frame_info: 函数用于获取中间帧的信息,包括点云数据、传感器校准信息、自车姿态、边界框及其对应的实例标识等intermediate_keyframe_align
Mware Fusion Pro 13 mac版:一键掌控虚拟世界
VMware Fusion Pro 13是一款功能卓越的虚拟化软件,专为Mac操作系统量身打造。这款软件为用户提供了一个一站式的虚拟化解决方案,能够满足各种多样化的需求。 VMware Fusion Pro 13 Mac获取 VMware Fusion Pro 13的强大之处在于其采用了最 先进的虚拟化技术,确保在Mac上提供高效、稳定的虚拟机性能。用户可以在虚拟机上流畅地运行各种应用程序和操
小学生都能懂的 RRF(Reciprocal Rank Fusion)说明
小学生都能懂的 RRF(Reciprocal Rank Fusion)说明 让我们用一个简单的例子来解释RRF(Reciprocal Rank Fusion)公式。 想象一下,你和你的朋友们都在寻找一本丢失的书。你们每个人都列出了自己认为最有可能藏书的地方,并且按照可能性从高到低排序。RRF公式就是用来结合所有人的列表,找出最有可能的地方。 假设有三个朋友,他们的列表如下:
免费安装VMware Workstation Pro 和 VMware Fusion Pro最新版下载地址,文章最后附win11网盘下载地址
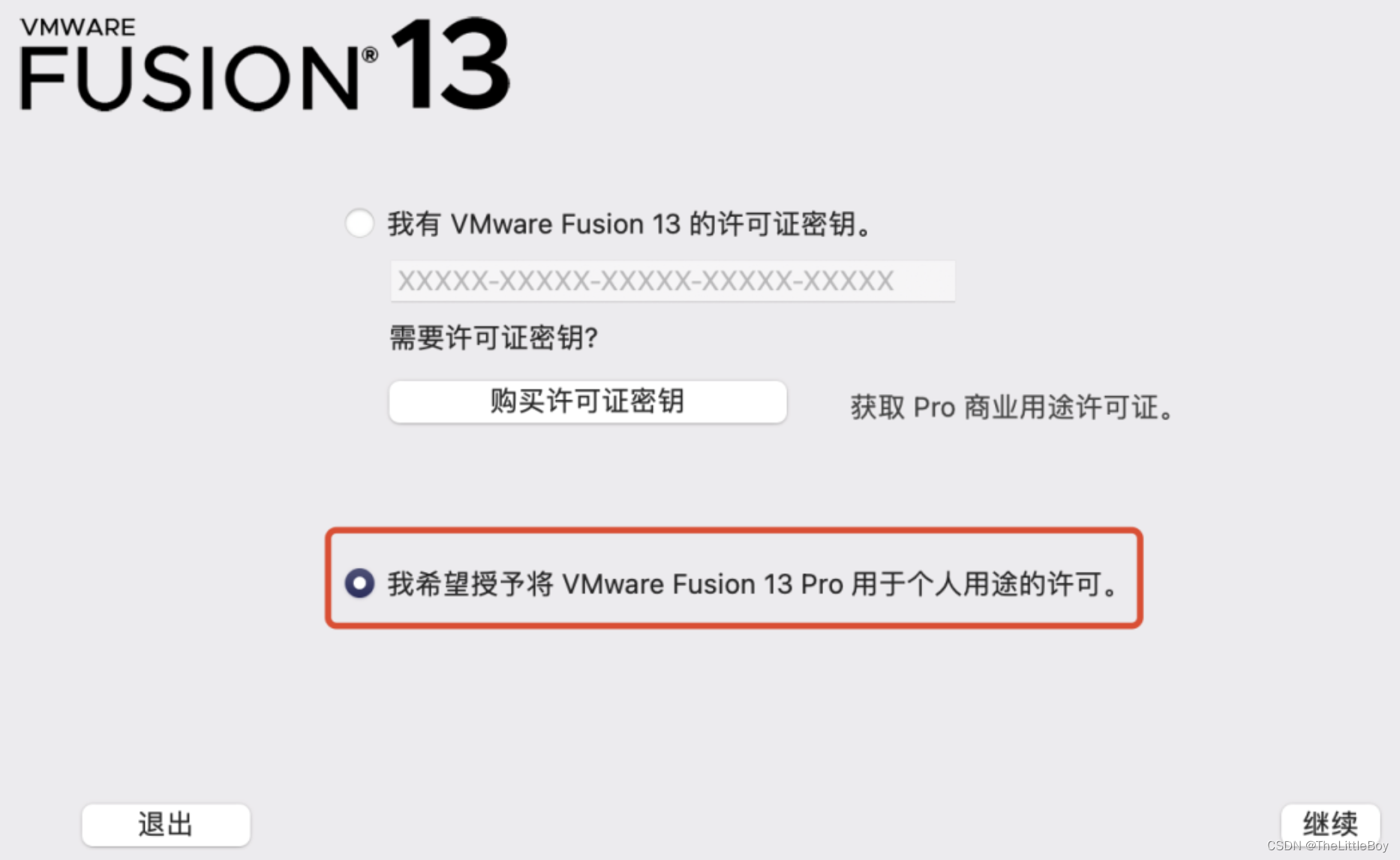
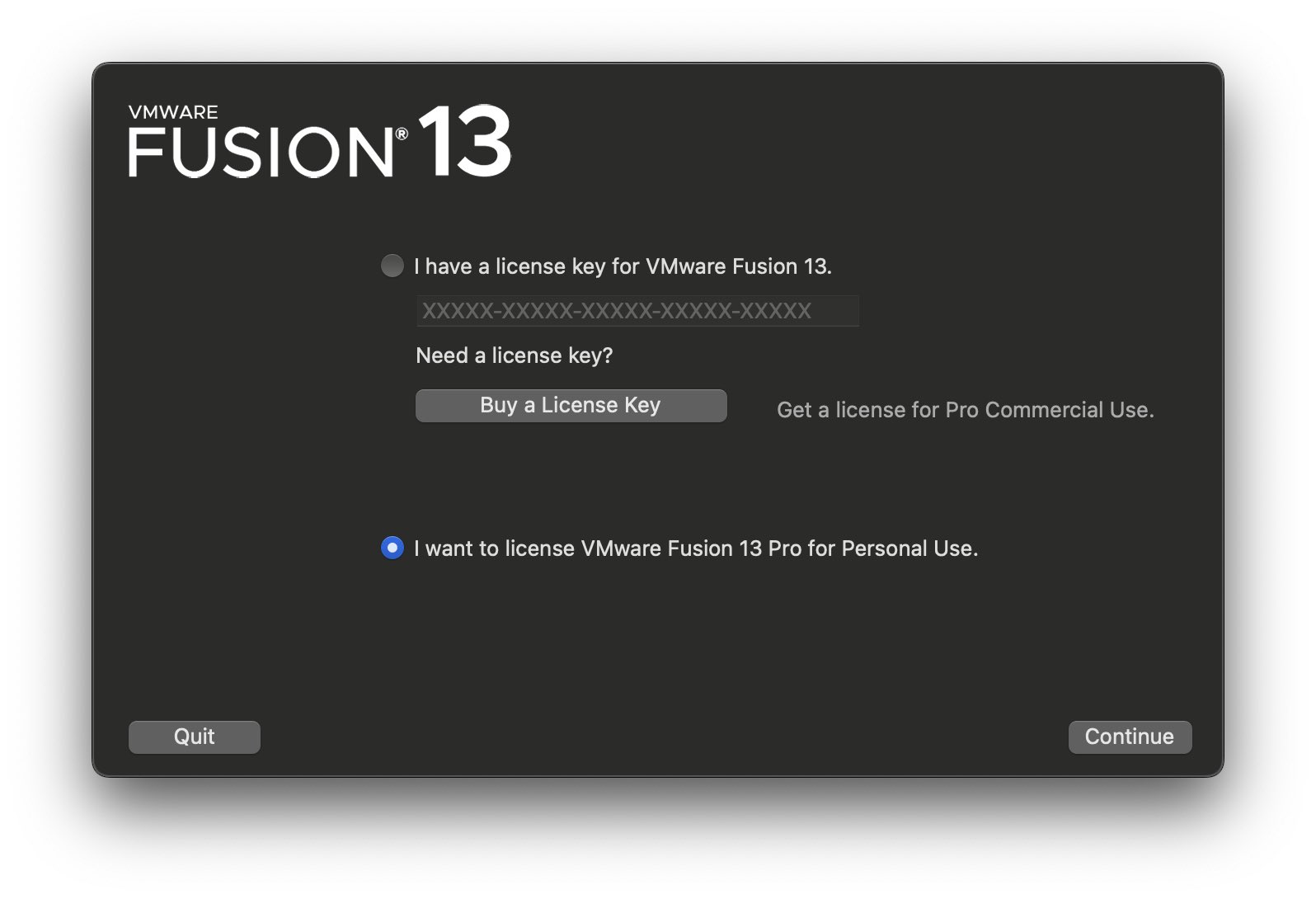
2024年5月 虚拟化技术巨头VMware宣布,其两款主要产品VMware Workstation Pro和VMware Fusion Pro即日起对个人用户免费开放。 VMware Workstation Pro适用于Windows或Linux操作系统,而Fusion Pro则适用于搭载Intel CPU或Apple M系列处理器的Mac电脑。 VMware强调,两种模式的版本在功能上没有差

Ubuntu18.04运行Vins-Fusion
目录 一. 安装ros 1. Installation 2. Environment setup 3. Dependencies for building packages 4. 安装ros与opencv的桥接工具包 5.验证ros是否安装成功 二. 安装eigen 三. 安装opencv 1. 进入下载opencv的根目录 四. 安装ceres 1. 安装ceres依赖项
论文《Sensor and Sensor Fusion Technology in Autonomous Vehicles: A Review》详细解析
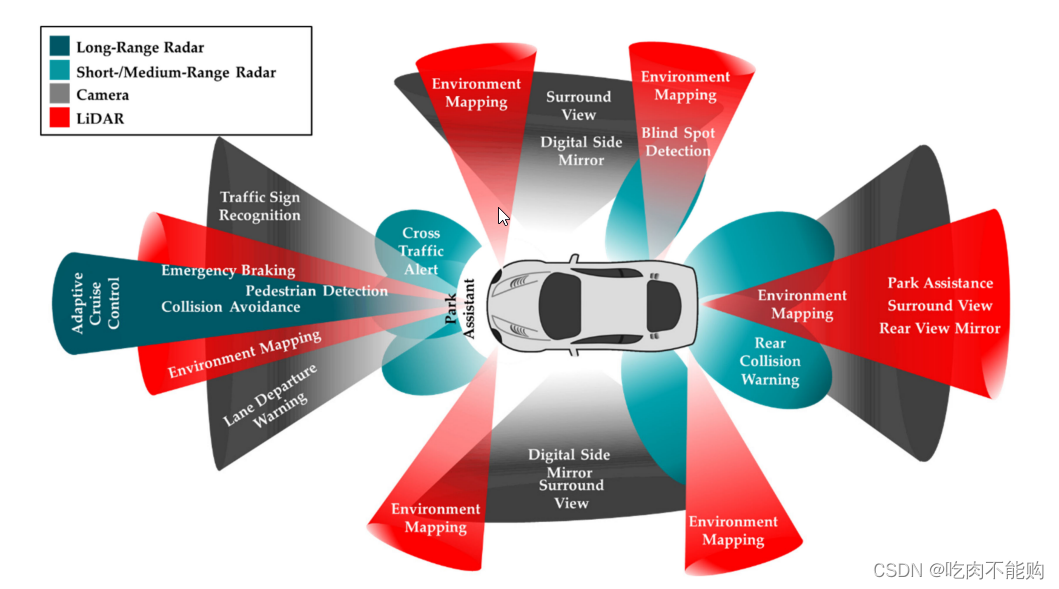
论文《Sensor and Sensor Fusion Technology in Autonomous Vehicles: A Review》详细解析 摘要 该论文对自动驾驶汽车中的传感器和传感器融合技术进行了全面回顾。它评估了各种传感器(如相机、LiDAR、雷达)的能力和技术性能,并讨论了多传感器校准的重要性和现有的开源校准包。论文还总结了主要的传感器融合方法和用于自动驾驶环境中的障碍物检
论文阅读——Bayesian Knowledge Fusion(贝叶斯知识融合)
该篇论文解决了不确定环境中的信息融合问题。想象一下,有多位专家针对同一情况构建概率模型,我们希望汇总他们提供的信息。直接合并每个信息可能会遇到几个问题。例如,专家们可能不同意某个事件发生的概率,或者他们可能不同意两个事件之间因果关系的方向(例如,一个人认为 A 导致 B,而另一个人认为 B 导致 A)。他们甚至可能不同意概率网络中一组变量之间的整个依赖结构。文章将概率模型表示为贝叶

Mac VMware Fusion提示物理内存不足
问题: Mac(版本Big Sur 11.2.1 )安装VMware Fusion专业版 8.0.0 (2985594),打开虚拟机提示“物理内存不足,无法使用配置的设置开启虚拟机” 解决方法: 升级到Version 12 https://my.vmware.com/group/vmware/evalcenter?p=fusion-player-personal

Mac使用VMware Fusion内部错误
问题: Mac(版本Big Sur 11.2.1 )安装VMware Fusion专业版 8.0.0 (2985594),打开虚拟机提示“内部错误” 解决方法: 打开终端Terminal输入命令: sudo xattr -r -d com.apple.quarantine /Applications/VMware\ Fusion.app

VMware Fusion 13.5.2 for Mac 发布,产品订阅模式首个重大变更
VMware Fusion 13.5.2 for Mac 发布,产品订阅模式首个重大变更 适用于基于 Intel 处理器和搭载 Apple 芯片的 Mac 的桌面虚拟化软件 请访问原文链接:https://sysin.org/blog/vmware-fusion-13/,查看最新版。原创作品,转载请保留出处。 作者主页:sysin.org 好消息是:今天我们可以免费使用 VMware
VMware Workstation Pro 和 Fusion Pro 针对个人用户使用免费了
今早看到 VMware by Broadcom 官方博客 VMware Desktop Hypervisor Pro Apps Now Available for Personal Use - VMware Cloud Foundation (VCF) Blog 以及 Learn more about VMware Desktop Hypervisor Products Subscription

Query-Adaptive Late Fusion for Image Search and Person Re-identification阅读笔记
Query-Adaptive Late Fusion for Image Search and Person Re-identification 自适应查询的图像检索晚期融合 摘要:很多文献表明特征融合对图像检索是有效的。一般来说融合各种各样的特征会帮助查询到更多有效的结果。然而,我们不会提前知道,对于给定查询,哪个特征是有效的。故而判断特征的有效性极其重要。 本文提出了一种针对得分层的有效

每日Attention学习3——Cross-level Feature Fusion
模块出处 [link] [code] [PR 23] Cross-level Feature Aggregation Network for Polyp Segmentation 模块名称 Cross-level Feature Fusion (CFF) 模块作用 双级特征融合 模块结构 模块代码 import torchimport torch.nn as

Mac VMware Fusion Centos7 静态ip配置
VMware Fusion 11 下载地址 链接:https://pan.baidu.com/s/1gJOlErwg4sbHrzsFpT1nTQ 密码:kiw8 虚拟机网络配置 首先把虚拟机的网络配置改成NAT模式 获取MAC的网络信息 在mac终端到这个目录下 cd /Library/Preferences/VMware\ Fusion/vmnet8 之后先cat nat.conf
记录些RAG-Fusion、Agent、NL2SQL的问题
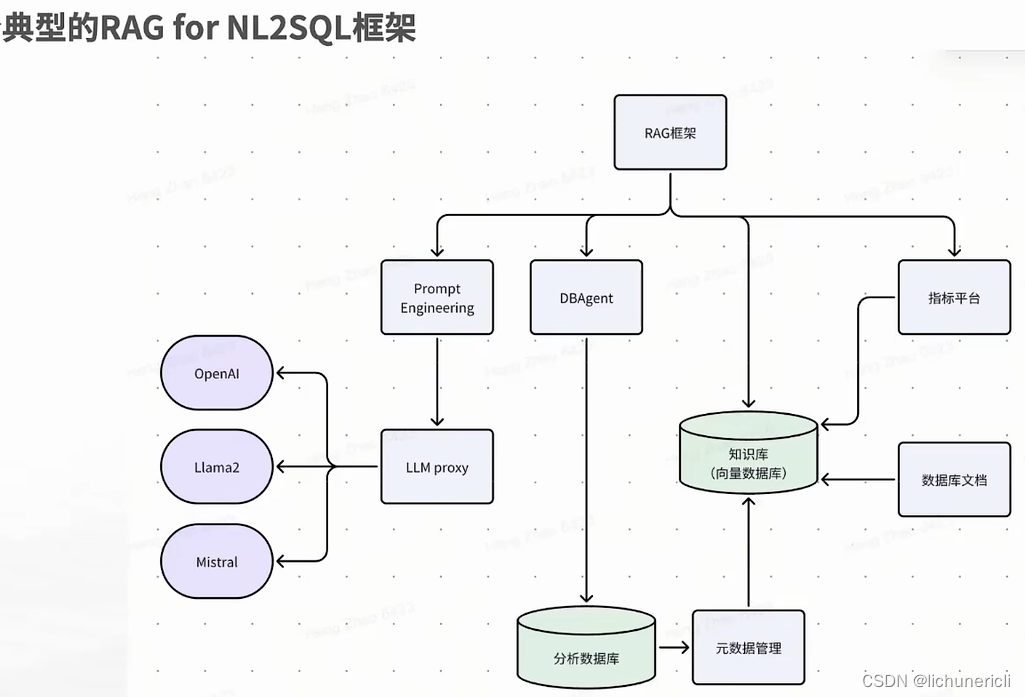
RAG-Fusion RAG-Fusion 的实现原理 Query Duplication with a Twist:用 LLM 根据用户的 Query 生成几个相关的但不同的 Queries。Vector Search Unleashed:对原 Query 和生成的 Queries 都进行向量(或者其他方式的)搜索。Intelligent Reranking:使用 Reciprocal
macOS中wmware fusion报『找不到可以连接的有效对等进程』、『Could not open /dev/vmmon』解决办法
我的是macOS 10,默认情况下不允许未知身份的软件安装 默认情况,如下图所示: 解决办法: sudo spctl --master-disable 这样就开启了允许安装『任何来源』的配置 这样就不会拦截软件的安装,而导致错误提示 听说,打赏我的人最后都找到了真爱。

【提示学习论文】PMF:Efficient Multimodal Fusion via Interactive Prompting论文原理
Efficient Multimodal Fusion via Interactive Prompting(CVPR2023) 基于交互式提示的高效多模态融合方法减少针对下游任务微调模型的计算成本提出模块化多模态融合架构,促进不同模态之间的相互交互将普通提示分为三种类型,仅在单模态transformer深层添加提示向量,显著减少训练内存的使用 1 Introduction 提示微调方法采用顺

DaVinci Fusion Studio 19 for Mac/win:影视后期特效合成的巅峰之作
在影视后期制作的广袤天地里,一款强大的特效合成软件如同一位技艺高超的魔法师,能够化腐朽为神奇,将普通的影像素材转变为震撼人心的视觉盛宴。而DaVinci Fusion Studio 19,正是这样一款备受影视从业者推崇的巅峰之作。 无论是Mac还是Windows用户,DaVinci Fusion Studio 19都能带来流畅无阻的操作体验。其界面设计简洁直观,功能布局合理,即使对于初学者也能快

如何安装MacOS的虚拟机?mac安装虚拟机的步骤 虚拟机安装MacOS VMware Fusion和Parallels Desktop19
要在Mac上运行MacOS的虚拟机,常用的方法是使用虚拟化软件如VMware Fusion或Parallels Desktop。 以下是安装MacOS的虚拟机的主要步骤: 1. 检查系统要求:确定您的Mac硬件和操作系统满足安装要求。您需要一台具备足够性能的Mac,并确保您的操作系统是最新的。 2. 获取虚拟化软件:选择您喜欢的虚拟化软件,并下载安装程序。VMware Fusion和