本文主要是介绍Autonomous Landing of a Multirotor Micro Air Vehicle on a High Velocity Ground Vehicle论文翻译,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
说明:本文为本人原创翻译,除了对原文进行翻译,还对部分知识点进行了拓展。未经允许,不得转载。
这篇论文在百度学术、谷歌学术等平台很容易就找到了,链接就不提供了。如果有翻译错误或者理解错误的地方,恳请看到的人及时指出,万分感激。
多旋翼飞行器在高速移动的地面交通工具上的自主降落
摘要:虽然自主多旋翼微型飞行器(MAV)对于某些需要固定悬停飞行能力的任务具有独特的适用性,但是他们在更加广泛的应用中仍然面临许多障碍,特别是他们有限的飞行范围和完全自主飞行和回收时的难度,在这篇论文中我们通过解决四旋翼在相对较高移速的地面车辆上的自主着陆问题来处理上述问题,我们展示的系统的结构包括用于估计四旋翼和着陆垫之间的相对位置和速度的卡尔曼滤波器的结构,以及我们用于完整的集结和着陆操作的控制器设计,该系统以一架商用四旋翼飞行器在一辆时速高达50公里/时的汽车车顶上多次成功着陆实验为实验依据。关键词:卡尔曼滤波器、自主车辆、移动机器人、导航系统、计算机视觉、航空控制。
1.引言
多旋翼微型飞行器(MAV)在固定悬停飞行方面的能力使得他们对于各种应用场景都有着特别的吸引力,例如:现场监控、包裹邮递或者是搜寻和救援行动,然而与此同时,由于他们相对短的电池寿命和短的飞行范围使得他们也面临着自身的挑战,从地面站的飞行和回收能够减缓这个问题并且允许在飞行场地内进行更高效的飞行和回收。例如:运输卡车、公共汽车、或者运输舰能够在兴趣点之间运载MAV并且允许他们周期性的充电。对于搜寻和救援行动,地面和空中交通工具的协同作用能够帮助节省宝贵的任务时间并且能够为有效部署大型自主MAV队伍铺平道路。更好地整合地面汽车和MAV的想法确实已经吸引了多家汽车和MAV制造商的关注(Kolodny, 2016; Lardinois, 2016)。搜救小组以前考虑过将一台MAV降落在移动平台上,但是大部分现存的作品只是涉及降落在一个舰艇平台或者精确的降落在一个静止的或缓慢移动的地面目标上。Lange et al. (2009) 提供了一个早期的例子,一个由同心环制成的定制的视觉标记被用来进行相对姿态估计,并通过使用光流和速度命令来进行控制。最近 Yang et al. (2015) 使用了Garrido-Jurado的ArUco库(基于OpenCV的增强现实应用程序的最小库)作为视觉基准和IMU测量融合在平方根无损卡尔曼滤波器中进行相对姿态估计。然而该系统仍然依赖于光流来准确地进行速度估计。一旦MAV与移动的地面平台对齐,这一点就成问题了,此时光流相机会突然测量平台相对于MAV的速度,而不是地面框架中MAV的速度。
Muskardin et al. (2016)开发了一个系统,该系统能够将固定翼MAV降落在移动的地面汽车车顶。然而,他们的方法要求地面汽车在着陆操作期间与MAV配合使用,并使用昂贵的RTK-GPS单元。Kim et al. (2014) 展示了使用简单的颜色斑点检测和非线性卡尔曼滤波器使四旋翼降落在一台移动的目标上是可能的,但是该测试方案仅适用于小于1m / s的速度。更值得注意的是,Ling (2014) 展示了使用低成本传感器与AprilTag基准标记(Olson,2011)相结合使四旋翼降落在一台小型地面机器人上是可能的。他进一步展示了帮助加速AprilTag检测的不同方法。他特别指出,当四旋翼定位于跟随地面平台时,面朝下的相机频繁地丢失视觉目标的踪迹,这强调了基于模型的估计器的重要性,如用于补偿的卡尔曼滤波器。
以上参考文献描述了移动平台上MAV的终端着陆阶段,但是完整的系统还必须包括一个策略,以便在接近阶段引导MAV向地面汽车移动。Proportional Navigation(PN) (Kabamba and Girard, 2014) 最常被称为弹道导弹的指导法则,但也能被用来做为无人驾驶飞机的指导。Holt和Beard(2010)开发了的一种专门用于固定翼飞行器跟踪的PN导航形式,并表明它适用于来自云台相机的视觉反馈。Gautam et al. (2015)比较了纯追踪模型(pure pursuit),视线(line-of-sight)和PN指导法(PN guidance laws)这三种方法,在这三种方法中PN指导法就总需求加速度和达到目标所需的时间方面而言是最有效的,另一方面,在目标的近距离范围内PN法又变得无效了。为了缓解这个问题,Tan和Kumar(2014)提出了一种从PN转移到PD控制器的切换策略。最后,为了最大限度地提高视觉目标获取从PN到PD的平滑过渡的可能性,可以按照Lin和Yang(2014)的方法将一个云台相机指向一个目标。
论文的贡献与组织,我们描述了一个完整的系统,该系统允许多旋翼微型飞行器(MAV)以相对较高的速度在移动的地面平台上自主着陆,仅使用市售和相对低成本的传感器。系统架构在第2节中进行了描述。第3节中描述的算法结合了一个用于估计相对位置和速度的卡尔曼滤波器、在接近阶段的基于PN的引导定律和最终着陆阶段的PID控制器。如第4节所述,两个控制器的实施都是通过对加速度和姿态的控制来实现的。第5节通过模拟测试和利用市售的多旋翼飞行器进行广泛的实际测试验证了我们的设计。据我们所知,我们演示的实验成功的将多旋翼微型飞行器(MAV)自主着陆到以50公里/小时的速度快速行驶的汽车(GV)上。
2.系统结构
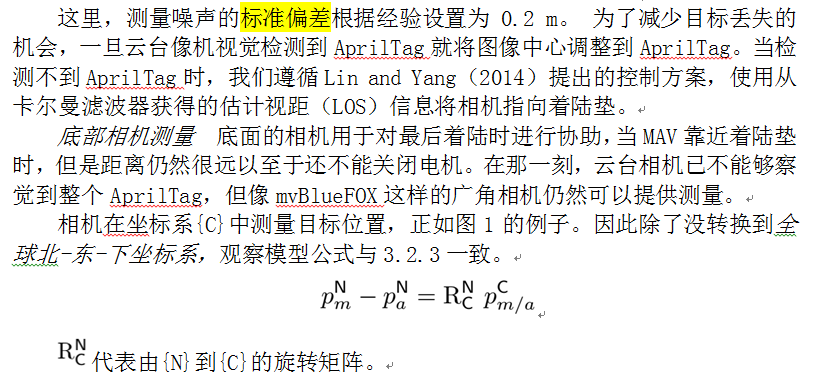
在本节中,我们描述了地面汽车和多旋翼微型飞行器系统架构的基本要素。 我们在实验中使用的硬件的具体细节将在第5节中给出。地面汽车配备了一个着陆垫,我们在其上放置了一个名叫AprilTag的30×30厘米视觉基准,由奥尔森(2011)设计,见图4,这使我们能够使用车载摄像机直观地测量着陆垫的6自由度(DOF)的姿态。另外,我们还对地面汽车的位置和加速度进行了测量。实际上低质量传感器足以达到这个目的,在我们的实验中,我们只需将手机放在着陆台上即可将其GPS数据以1 Hz的频率传输到MAV,其IMU的数据传输到MAV的频率最大为25 Hz。我们还可以基于连续的位置测量来整合由基本的GPS单元返回的粗略的航向信息和速度估计信息。MAV配备了一个惯性导航系统(INS),一个可定向的3轴云台相机(具有单独的IMU)用于目标跟踪,以及具有一个向下的广角镜头相机,这使我们能够在最后一刻的着陆操作中甚至在非常近的范围内跟踪到AprilTag。 接近阶段在控制板上附加一个速度传感器也有好处。 许多的商业MAV装备有依赖于光流方法的速度传感器,其通过计算连续图像中的运动特征来从视觉上估计出速度。see, e.g., (Zhou et al., 2015)
在图1中定义和演示了四个主要的坐标系。1)全球“北-东-下”(N-E-D)坐标系表示为{N},位于四旋翼飞行器检测的第一个点; 2)MAV机体坐标系{B}是由机身的十字结构进行定义的,X轴正方向的位置指向两臂之间,Y轴指向X轴的右侧;3)云台相机坐标系{G}依赖于移动相机的镜头中心位置,它的Z轴正向垂直于图像平面,其x轴指向云台框架的右侧;4)最后,面朝下的固定相机坐标系{C}是由MAV机体坐标系绕ZB轴旋转90°获取,其原点位于相机的光学中心。

图1
图4

3.卡尔曼滤波器
根据我们的指导和控制系统的要求,对MAV和着陆垫之间的相对位置、速度和加速度的估计是通过一个以100Hz运行的的卡尔曼滤波器进行的。图2显示了该滤波器的结构,下面段落对该滤波器进行了描述。
图2
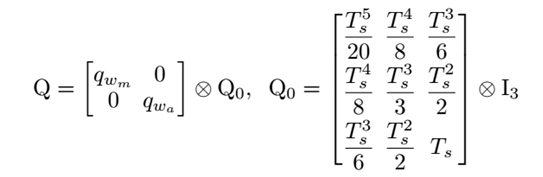
3.1流程模型(公式是在word上编辑的,这里我截图了)

qwn和
qwa分别是MAV和GV加速度的PSD,这些参数通常作为经验调整过程的一部分先验地选择。
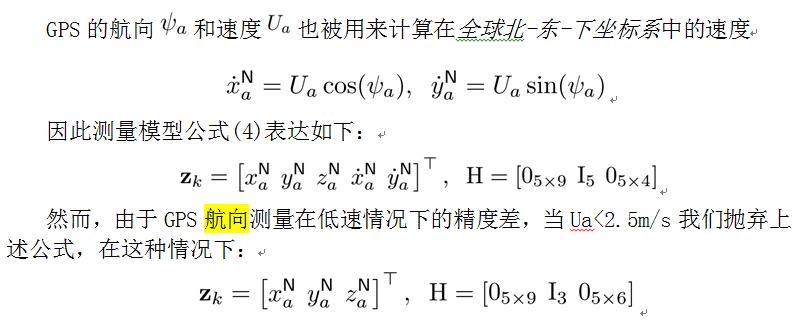
3.2测量模型
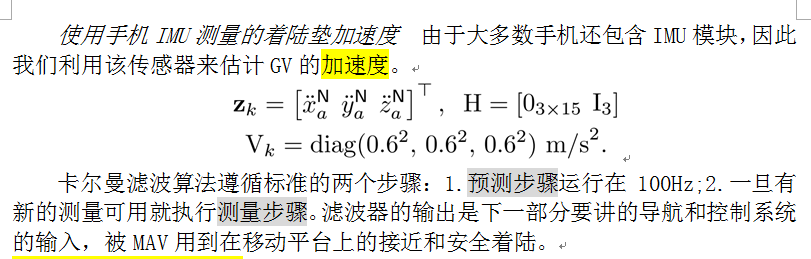
通常,在K时刻的测量向量由下列公式给出:

在惯性导航系统中的位置、速度、加速度 我们的微型多旋翼的惯性导航系统结合了IMU,GPS 和视觉测量传感器用来提供位置、速度、和重力加速度补偿数据,直接在全球北-东-下坐标系表达如下:

正如前面提到的,当MAV在一个移动的平台上飞行时依赖于光流方法来进行速度测量是不准确的,因此我们将速度噪声的标准差(standard deviation)从接近阶段(approach phase)的0.1m/s增加到着陆阶段(landing phase)的10m/s。目标的GPS测量,放在地面汽车上的手机中的GPS单元提供了位置、速度、朝向三种测量信息,这个包含了在全球北-东-下坐标系{N}中降落垫位置的信息是由嵌入式计算机(OBC)通过建立的一个无线连接发送给MAV的。

Re=6378137m代表地球半径的长度,la,lo,al分别代表降落垫的经度、纬度、高度,下标0代表初始点,上述方程在当前位置离开始点不太远并且假设地球是球形时有效,但是还可以使用更精确的变换(Groves, 2013)。
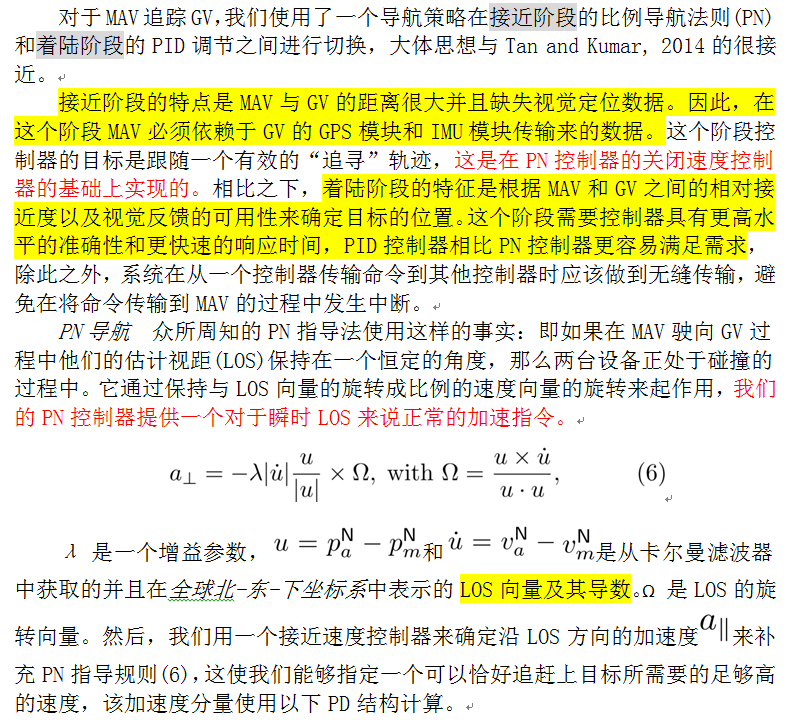
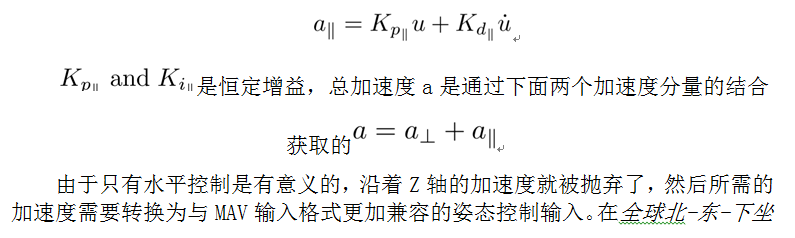
4.导航和控制系统
5.实验验证
5.1系统描述
我们将我们的系统实施于一台现成的商用DJI经纬M100四旋翼飞行器中,如图3所示。所有的计算都是在这个平台上 (DJI Manifold)的标准板载计算机完成的,包含了英伟达Tegra K1芯片,使用的3轴云台摄像头是Zenmuse X3,使用该摄像头我们可以以30HZ的频率接收到720P的YUM彩色图象,我们放弃U和V通道,并对图像进行下采样处理以获得640x360个单色图像,我们改装了M100并将一个朝下的矩阵视觉摄像头mvBlueFOX挂载在M100上,该摄像头配备了一个对角线为176度的超广角镜头Sunex DSL224D,M100还配备了DJI导航模块,最多可以配置五个立体相机,这意味着能够帮助开发者解决在开发机器人应用时解决构建地图和避障等问题。该模块与INS无缝集成,使用Zhou等人描述的车载传感器为我们提供了M100的位置,速度和加速度的测量。该信息被应用在等式(5)的卡尔曼滤波器中,我们的算法使用ROS在C++中实现(Quigley et al., 2009)。使用基于OpenCV的AprilTag库的开源实现和OpenCV4Tegra提供的加速度,我们利用X3相机和BlueFOX 相机对标签进行检测,X3相机的每秒传输帧数是每秒30帧,BlueFOX相机每秒传输帧数是每秒20帧。正如第4节提到的,我们利用在XY轴上的纯姿态控制和在Z轴上的速度控制来实施我们的控制系统。其原因是M100的内部速度估计器融合了来自导航系统中的光流测量值。
一旦四旋翼飞行器飞到着陆平台的垂直方向时这种测量就变得极其不准确。
虽然光流能够被用来测量汽车的相对速度,但是要确定从相对于地面过渡到相对于正在移动的汽车的那个时刻是非常困难的。
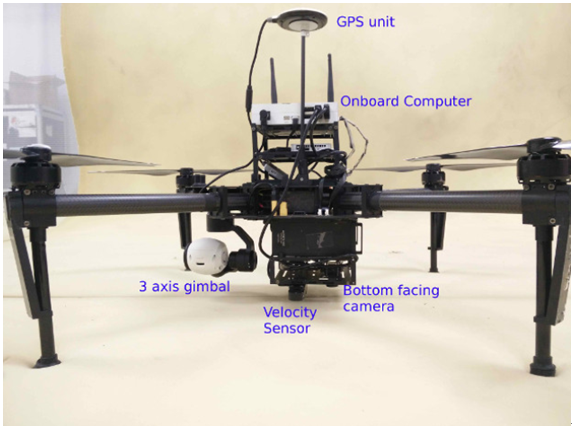
图3
5.2实验性的结果
已完成的第一个实验仅使用来自于手机的数据来证明我们的PN控制器在应用于长距离的接触阶段时是有效的。图5显示了我们的扩展卡尔曼滤波器(EKF)估计MAV和目标位置的输出。目标汽车和MAV的起始距离相距30m。我们观察MAV以一个平滑的会合轨迹最终飞到了目标汽车车顶。近距离系统通过以下实验得到验证:移动汽车以30,40和50公里/小时的速度(低于人类慢跑速度)在私人赛道上移动时,MAV每次都能够成功着陆在汽车车顶。我们实验的视频可以在该网址上找到https://youtu.be/ILQqD2xQ4tg。图6展示了整个着陆过程序列,从四旋翼起飞、追踪、到降落在着陆垫上。The curves gain in altitude as the trajectory progresses because of the elevation profile of the race track. 从赛道剖面来看,由于赛道的上升,曲线随着轨道的推进而上升,这种效果在图7中看的更加清楚,我们看到经滤波的AprilTag的高度也在上升,因为有了视觉数据和M100的内部高度估计器使得我们能够在手机的GPS数据传输来之前让我们看到AprilTag高度上的变化。此外,我们可以在图7中还看到M100是如何与AprilTag的速度紧密匹配来执行着陆操作的。我们可以在图8中观察到在24和27秒标记处的两个峰值与BlueFOX相机的标签的视觉损失密切相关。在第24秒时下降开始,汽车达到14米/秒或50.4公里/小时的指定速度。我们也可以在图7中观察到当M100位于汽车车顶上时,来自于INS的M100的速度估计是如何变得不正确的。这也就解释了在3.2节中我们为什么要动态的增加测量的标准差。图9展示了四旋翼在飞行时的姿态。要注意在不断的飞行过程中俯仰角保持在-10度到-25度时滚转角是如何稳定地接近于0度的。
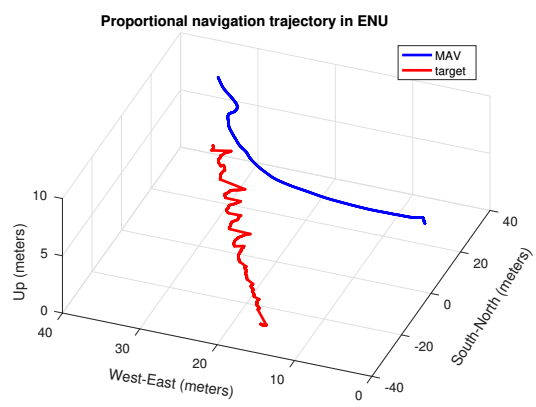
图5
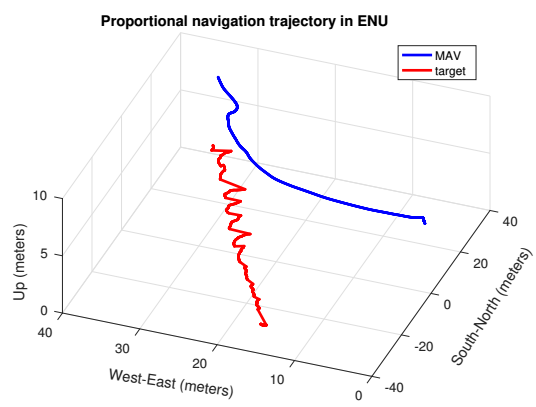
图6
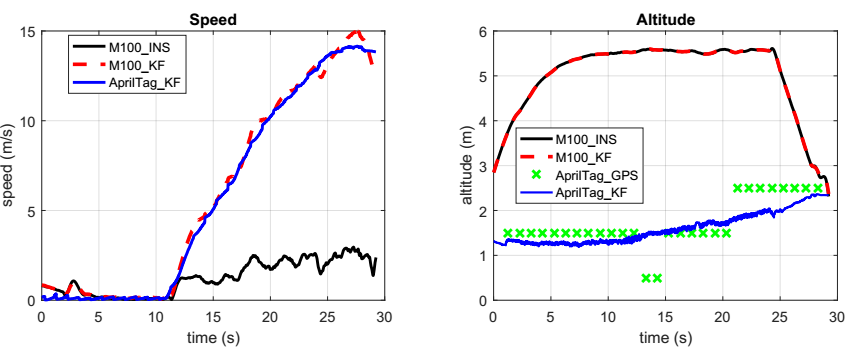
图7
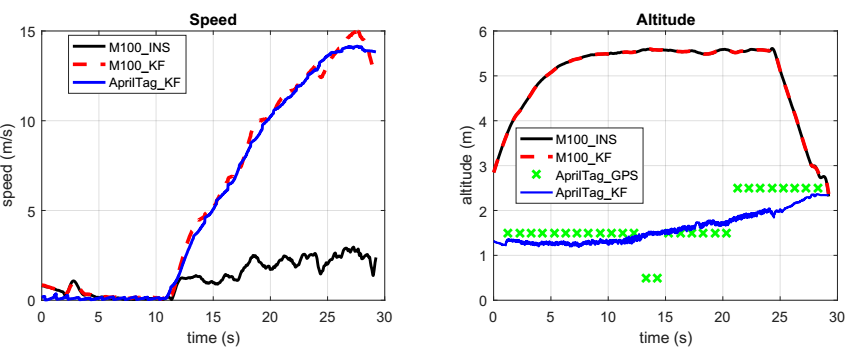
图8
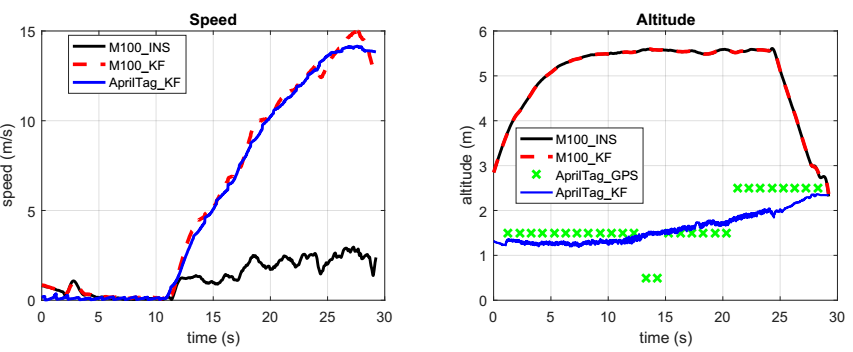
图9
6.结论
MAV在移动车辆上自动着陆的问题是通过速度达到50公里/小时的测试实验来解决的。当MAV与GV处于相距较远的接近阶段时应用PN控制器来调节,MAV处于着陆阶段时控制器转换成PID。卡尔曼滤波器通过结合来自于MAV板载惯性导航系统(INS)、视觉基准标记和一台移动电话的测量信息来估计MAV相对于着陆垫的相对位置。此外,已经表明该系统可以使用现成的商业组件来实现。未来的工作可能包括在着陆垫上使用一个更好的多维度的视觉基准,以便能够使用单个相机在更远和更近的范围内对视觉目标进行跟踪,或通过去除对手机的需求来简化系统。可以通过添加一个地面的干扰模型或者增加控制系统中的风力估计模型来使提高整个系统的表现。
这篇关于Autonomous Landing of a Multirotor Micro Air Vehicle on a High Velocity Ground Vehicle论文翻译的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







![[论文笔记]LLM.int8(): 8-bit Matrix Multiplication for Transformers at Scale](https://img-blog.csdnimg.cn/img_convert/172ed0ed26123345e1773ba0e0505cb3.png)