deepsort专题

YOLOv8/v10+DeepSORT多目标车辆跟踪(车辆检测/跟踪/车辆计数/测速/禁停区域/绘制进出线/绘制禁停区域/车道车辆统计)
01:YOLOv8 + DeepSort 车辆跟踪 该项目利用YOLOv8作为目标检测模型,DeepSort用于多目标跟踪。YOLOv8负责从视频帧中检测出车辆的位置,而DeepSort则负责关联这些检测结果,从而实现车辆的持续跟踪。这种组合使得系统能够在视频流中准确地识别并跟随特定车辆。 02:YOLOv8 + DeepSort 车辆跟踪 + 任意绘制进出线 在此基础上增加了用户

最新!yolov10+deepsort的目标跟踪实现
目录 yolov10介绍——实时端到端物体检测 概述 主要功能 型号 性能 方法 一致的双重任务分配,实现无 NMS 培训 效率-精度驱动的整体模型设计 提高效率 精度提升 实验和结果 比较 deepsort介绍: yolov10结合deepsort实现目标跟踪 效果展示 训练与预测 UI设计 其他功能展示 完整代码实现+UI界面 此次yolov10

行为识别实战第二天——Yolov5+SlowFast+deepsort: Action Detection(PytorchVideo)
Yolov5+SlowFast+deepsort 一、简介 YoloV5+SlowFast+DeepSort 是一个结合了目标检测、动作识别和目标跟踪技术的视频处理框架。这一集成系统利用了各自领域中的先进技术,为视频监控、体育分析、人机交互等应用提供了一种强大的解决方案。 1. 组件说明: YoloV5: Yolo(You Only Look Once)是一个流行的实时目标检测

三种方式实现人车流统计(yolov5+opencv+deepsort+bytetrack+iou)
一、运行环境 1、项目运行环境如下 2、CPU配置 3、GPU配置 如果没有GPU yolov5目标检测时间会比较久 二、编程语言与使用库版本 项目编程语言使用c++,使用的第三方库,onnxruntime-linux-x64-1.12.1,opencv-4.6.0 opencv 官方地址Releases - OpenCV opencv github地址https://

DeepSORT(目标跟踪算法)卡尔曼滤波中的贝叶斯定理
DeepSORT(目标跟踪算法)卡尔曼滤波中的贝叶斯定理 flyfish 从例子中介绍名词 假设我们有一个袋子,里面有5个红球和3个蓝球。我们从袋子里随机抽取一个球。 概率 (Probability) 我们想计算从袋子里抽到红球的概率 P ( R ) P(R) P(R)。 红球的数量是5,球的总数量是8,所以抽到红球的概率是: P ( R ) = 5 8 P(R) = \frac{

DeepSORT(目标跟踪算法) 卡尔曼滤波的完整流程
DeepSORT(目标跟踪算法) 卡尔曼滤波的完整流程 flyfish DeepSORT(目标跟踪算法)中的状态向量与状态转移矩阵 DeepSORT(目标跟踪算法)中卡尔曼滤波器中的更新 DeepSORT(目标跟踪算法)中卡尔曼增益的理解 DeepSORT(目标跟踪算法)中的卡尔曼滤波 - 看了就会的状态转移矩阵 DeepSORT(目标跟踪算法)中的初始化卡尔曼滤波器的状态向量和协方差

DeepSORT(目标跟踪算法)中的状态向量与状态转移矩阵
DeepSORT(目标跟踪算法)中的状态向量与状态转移矩阵 flyfish 状态转移矩阵(State Transition Matrix)F的构造 这篇是一定要看的,拖到文章的最后部分,需要理解状态转移矩阵怎么来的,怎么是这个样子 状态向量(State Vector) 状态向量描述系统在某个时间点的完整状态。它通常包括多个变量,例如位置、速度、加速度等,具体取决于系统的动态特性。 记作

DeepSORT(目标跟踪算法) 卡尔曼滤波 状态向量是如何映射到观测向量(测量向量)的即观测矩阵的构建方式
DeepSORT(目标跟踪算法) 卡尔曼滤波 状态向量是如何映射到观测向量(测量向量)的即观测矩阵的构建方式 flyfish 测量向量和观测变量在卡尔曼滤波的上下文中通常是同一个意思。它们都指的是从系统中直接获得的数据,这些数据用于更新系统的状态估计。可以是从传感器或测量设备直接获得的数据。这些数据反映了系统在某一时刻的状态或者实际观测到的值,但通常带有噪声。 状态向量映射到观测向量的过程通过
目标跟踪(一)——Deepsort项目调试
文章目录 项目地址环境安装效果注意 项目地址 项目地址:https://github.com/ZQPei/deep_sort_pytorch 环境安装 按项目的安装步骤,按要求安装好相应的依赖,下载好相应的模型就可以测试了 效果 deepsort多目标跟踪效果视频 注意 整个项目应该是用YOLO v3做检测然后在做轨迹预测、匹配的。所以YOLO v3没有检测到的物体
DeepSORT(目标跟踪算法)中的初始化卡尔曼滤波器的状态向量和协方差矩阵
DeepSORT(目标跟踪算法)中的初始化卡尔曼滤波器的状态向量和协方差矩阵 flyfish 如果看了下面遇到了状态转移矩阵,可以先看 DeepSORT(目标跟踪算法)中的卡尔曼滤波 - 看了就会的状态转移矩阵 ,这里做了非常详细的描述 import numpy as npnp.set_printoptions(suppress=True)class KalmanFilter(object)
DeepSORT(目标跟踪算法)中卡尔曼滤波器中的预测
DeepSORT(目标跟踪算法)中卡尔曼滤波器中的预测 flyfish 先略再详,先简洁的说,再细说。 卡尔曼滤波器的预测步骤主要有两个目标: 预测下一时刻的状态向量:根据当前状态和运动模型,预测对象在下一时刻的位置和速度。更新协方差矩阵:根据运动模型和过程噪声,更新预测的状态不确定性。 两个重要的点 运动模型:由状态转移矩阵 F \mathbf{F} F 描述,在代码中是 self.

DeepSORT(目标跟踪算法)中的马氏距离详解(很详细)
DeepSORT(目标跟踪算法)中的马氏距离详解(很详细) flyfish 马氏距离的公式是由印度统计学家【普拉萨纳·钱德拉·马哈拉诺比斯(Prasanta Chandra Mahalanobis)】)(好长的名字,抄的)在1936年提出的。马氏距离是一种多维尺度上的距离度量,它考虑了各个维度之间的相关性,并且通过协方差矩阵对数据进行缩放,使得在计算不同数据点之间的距离时,可以考虑到各个维度的

DeepSORT(目标跟踪算法)中自由度决定卡方分布的形状
DeepSORT(目标跟踪算法)中自由度决定卡方分布的形状 flyfish 重要的两个点 自由度决定卡方分布的形状(本文) 马氏距离的平方在多维正态分布下服从自由度为 k 的卡方分布 独立的信息 在统计学中,独立的信息是指数据中的独立变量或值的数量。当我们计算样本统计量(如平均值或方差)时,某些数据点的值可以从其他数据点和统计量中推导出来,因此这些点不再提供独立的信息。 卡方分布是一种

DeepSORT(目标跟踪算法)中的数值表格与调参的关系
DeepSORT(目标跟踪算法)中的数值表格与调参的关系 flyfish DeepSORT(目标跟踪算法)中的马氏距离详解(很详细) DeepSORT(目标跟踪算法)中 可以设置阈值进行异常检测或目标跟踪的原因(写了重要步骤) 代码地址 https://github.com/shaoshengsong/DeepSORT 文字要是懒得看,直接拖到后面看图。 原始代码 Python版
DeepSORT(目标跟踪算法)中的解三角方程计算标准化残差(解线性方程组)
DeepSORT(目标跟踪算法)中的解三角方程计算标准化残差(解线性方程组) flyfish 《DeepSORT(目标跟踪算法)中的计算观测值与状态估计的马氏距离》这篇文章介绍了Cholesky 分解。Cholesky 分解将协方差矩阵分解成下三角矩阵,使得求解过程可以高效进行。这篇是利用 solve_triangular 函数,我们可以高效地解这些线性方程组,从而得到标准化残差和更新后的状态
[深度学习]yolov10+deepsort+pyqt5实现目标追踪
YOLOv10+DeepSORT+PyQt5实现目标追踪系统 在现代智能监控系统中,目标追踪技术扮演着至关重要的角色。结合YOLOv10(一种先进的实时目标检测算法)与DeepSORT(一种多目标追踪算法),并通过PyQt5构建用户界面,我们可以开发出一套高效、直观的目标追踪系统。 YOLOv10以其出色的检测速度和准确性,在实时视频流中快速识别出目标物体。而DeepSORT算法则进一步提高了
AI项目二十:基于YOLOv8实例分割的DeepSORT多目标跟踪
若该文为原创文章,转载请注明原文出处。 前面提及目标跟踪使用的方法有很多,更多的是Deepsort方法。 本篇博客记录YOLOv8的实例分割+deepsort视觉跟踪算法。结合YOLOv8的目标检测分割和deepsort的特征跟踪,该算法在复杂环境下确保了目标的准确与稳定跟踪。在计算机视觉中,这种跟踪技术在安全监控、无人驾驶等领域有着广泛应用。 源码地址:GitHub - MuhammadM

算法部署 | 使用TensorRT+DeepSort+YOLOv5在NVIDIA-Jetson平台上部署目标跟踪算法
项目应用场景 面向英伟达 Jetson 边缘计算平台部署目标跟踪算法场景,使用深度学习算法 YOLOv5 + DeepSort 来实现,并使用 TensorRT 进行算法加速,项目支持 NVIDIA Jetson Xavier、NVIDIA Jetson Xavier NX、X86 平台的算法部署。 项目效果 项目细节 ==> 具体参见项目 README.md (1) 模型转换
DeepSort行人车辆识别系统(实现目标检测+跟踪+统计)
文章目录 1、前言2、源项目实现功能3、运行环境4、如何运行5、运行结果6、遇到问题7、使用框架8、目标检测系列文章 1、前言 1、本文基于YOLOv5+DeepSort的行人车辆的检测,跟踪和计数。 2、该项目是基于github的黄老师傅,黄老师傅的项目输入视频后,直接当场利用cv2.imshow(),查看识别的结果, 无法当场保存检测完视频,而且无法在服务器上跑,本文实现保

极智项目 | 基于YOLOv5+DeepSort实现的车流量统计算法
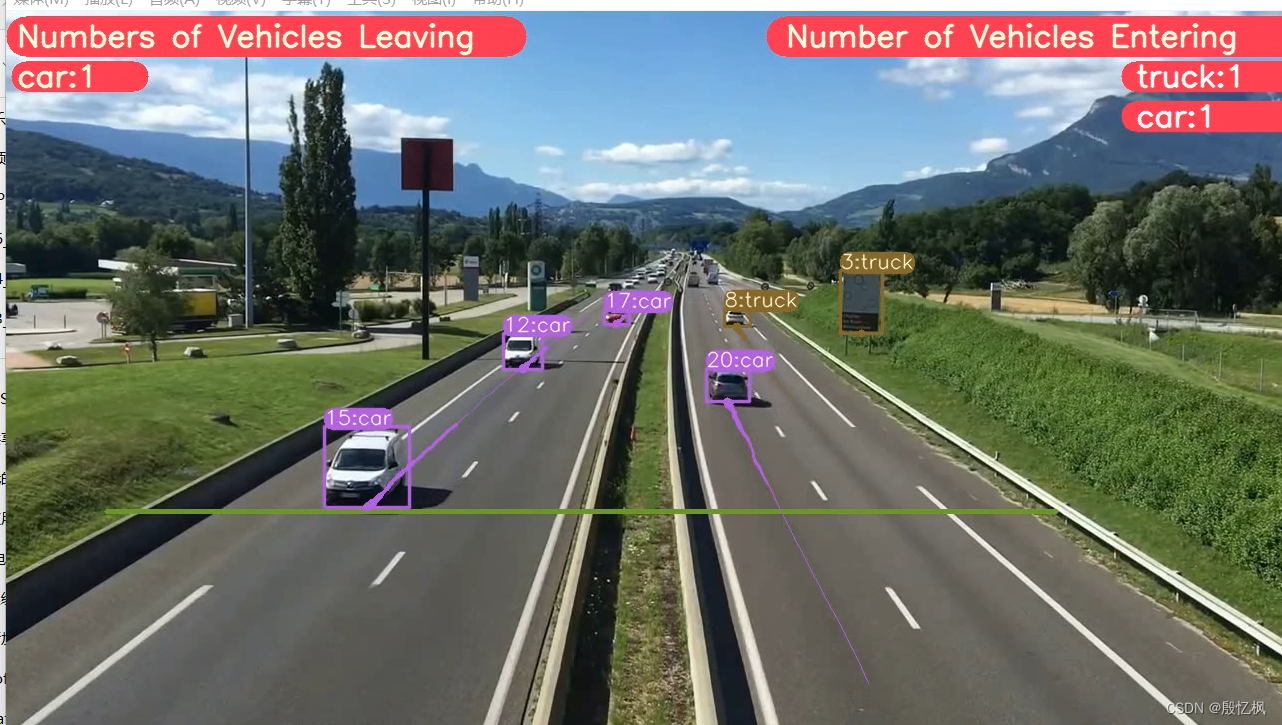
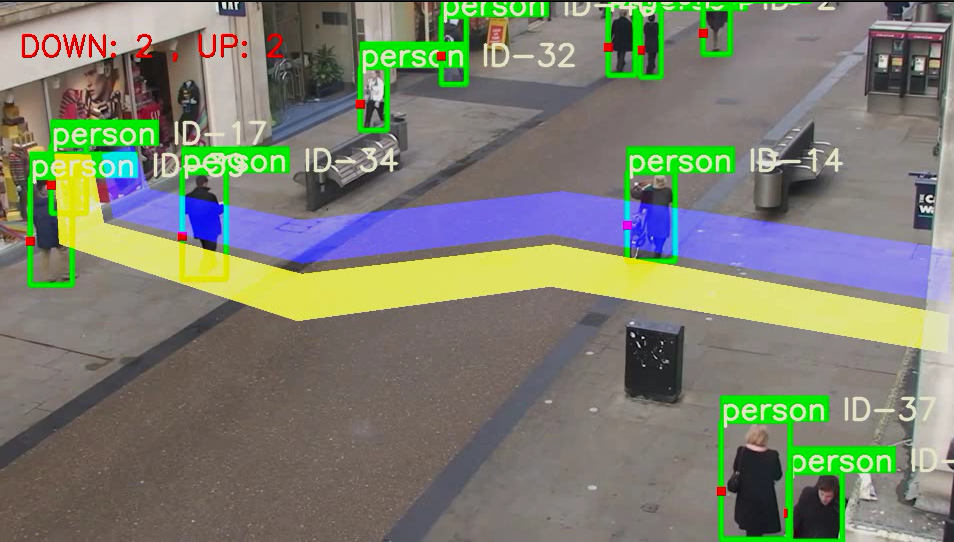
欢迎关注我的公众号「极智视界」,获取我的更多技术分享 大家好,我是极智视界,本文分享一下 基于YOLOv5+DeepSort实现的车流量统计算法。 车流量统计的实现一般原理是跟踪画面上检测出来的车辆,并给每个框标上了序号,当有一个方框跨过检测线时,计数器就会+1,这其实跟人流量统计的算法实现原理是一样的。所以这种类型的项目一般就会用到两种算法,首先是目标检测算法,先把待统计流量的目标给检测

YOLOv8+DeepSort/ByteTrack-PyQt-GUI / yolov5 deepsort 行人/车辆(检测 +计数+跟踪+测距+测速)
YoloV8结合可视化界面和GUI,实现了交互式目标检测与跟踪,为用户提供了一体化的视觉分析解决方案。通过YoloV8算法,该系统能够高效准确地检测各类目标,并实时跟踪它们的运动轨迹。 用户可以通过直观的可视化界面进行操作,实现目标检测与跟踪的交互式体验。GUI的设计使得用户可以轻松选择不同的参数设置,调整算法运行方式,以满足不同场景下的需求。 这一集成系统的优势在于其简单易用性和高效性。用户

14、zedboard 7020 编译Opencv3.4+Opencv_contrib3.4+DeepSort(软核)
基本问题描述:因为希望使用opencv 附加库的DNN 模块,搞一下深度学习的内容,因为上一篇博客已经自己制作了一个debain系统在zynq7020上,因此在该系统上编译opencv3.4 上,编译过程如下: 1、安装附加库 sudo apt-get install build-essential cmake git pkg-configsudo apt-get install libjp
DEEPSORT算法:深度学习驱动下的高效多目标跟踪
DEEPSORT算法核心原理梗概 DEEPSORT(Deep Simple Online and Realtime Tracking)是一种基于深度学习的多目标跟踪算法。其核心原理在于利用深度学习模型进行目标检测,并结合卡尔曼滤波器进行目标状态预测和数据关联,从而实现目标的连续跟踪。DEEPSORT算法在准确性和实时性之间取得了良好的平衡,适用于各种场景下的多目标跟踪任务。 DEEPSOR
目标检测与跟踪 yolov5 + deepsort
Yolov5---目标检测 or Yolov5 + Deepsort---目标跟踪 目标检测算法目标跟踪算法数据集均标注txt格式需要的源代码或者数据集私聊我企鹅:2870638728 目标检测算法 烟火检测、抽烟检测、安全帽检测、佩戴口罩检测、人员离岗检测、禁区人员闯入检测、固定区域检测、汽车违规停车检测、人的违规行为等相关检测 目标跟踪算法 人流量双向计数、超市人流量、地

DeepSORT算法实现车辆和行人跟踪计数和是否道路违规检测(代码+教程)
DeepSORT算法是一种用于目标跟踪的算法,它可以对车辆和行人进行跟踪计数,并且可以检测是否存在道路违规行为。该算法采用深度学习技术来提取特征,并使用卡尔曼滤波器来估计物体的速度和位置。 DeepSORT算法通过首先使用目标检测算法来识别出场景中的车辆和行人,然后使用卷积神经网络(CNN)来提取物体的特征。接着,该算法使用余弦相似度来计算物体之间的相似度,并使用匈牙利算法来匹配跟踪器和检测器之
DeepSORT及SORT的说明
整体思路 SORT 算法的思路是将目标检测算法得到的检测框与预测的跟踪框的 iou(交并比)输入到匈牙利算法中进行线性分配来关联帧间 Id。而 DeepSORT 算法则是将目标的外观信息加入到帧间匹配的计算中,这样在目标被遮挡但后续再次出现的情况下,还能正确匹配 Id,从而减少 Id Switch。 算法思路 状态估计(state estimation)和轨迹处理(track handing)