本文主要是介绍GEM: Online Globally Consistent Dense Elevation Mapping for Unstructured Terrai,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
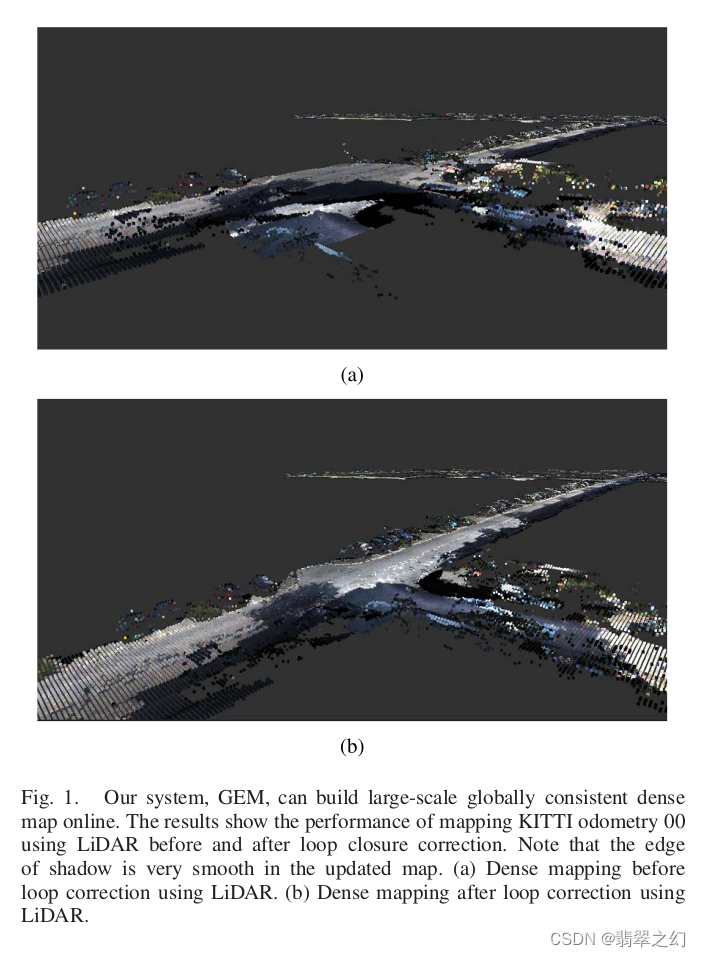
由于栅格地图难以解决不平整环境的建图问题,高程图在室外环境得到了广泛应用。为了在建图过程中确保的全剧一致性。本文将全局高程图表示为一组子图的集合,通过变形子图相对位置来保证全局一致性,局部和全局建图分别在GPU和CPU上运行。项目地址:https://github.com/ZJU-Robotics-Lab/GEM
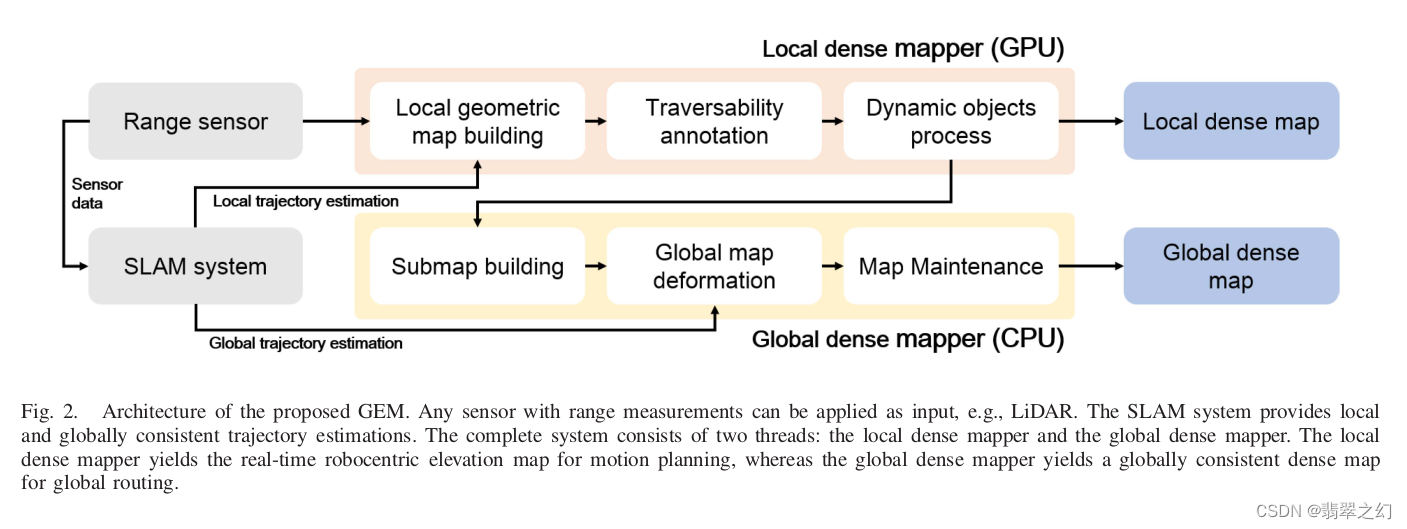
局部地图构建
融合多帧观测更新高程图,分析可行驶区域,检测动态物体。动态物体用的是ray-cast的方法,怪不得要用GPU。
全局地图构建
如果轨迹长度超过阈值,就新建一张子图,当检测到回环,或者子图重叠时,对子图进行融合。
这篇关于GEM: Online Globally Consistent Dense Elevation Mapping for Unstructured Terrai的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!

![[论文笔记]Making Large Language Models A Better Foundation For Dense Retrieval](https://img-blog.csdnimg.cn/img_convert/6dbbf911e7e57daa6ac5366f311e3e68.png)





