globally专题

【译】PCL官网教程翻译(22):全局对齐空间分布(GASD)描述符 - Globally Aligned Spatial Distribution (GASD) descriptors
英文原文查看 全局对齐空间分布(GASD)描述符 本文描述了全局对齐的空间分布(GASD)全局描述符,用于有效的目标识别和姿态估计。 GASD基于表示对象实例的整个点云的参考系的估计,该实例用于将其与正则坐标系对齐。然后,根据对齐后的点云的三维点在空间上的分布情况计算其描述符。这种描述符还可以扩展到整个对齐点云的颜色分布。将匹配点云的全局对齐变换用于目标姿态的计算。更多信息请参见GASD。
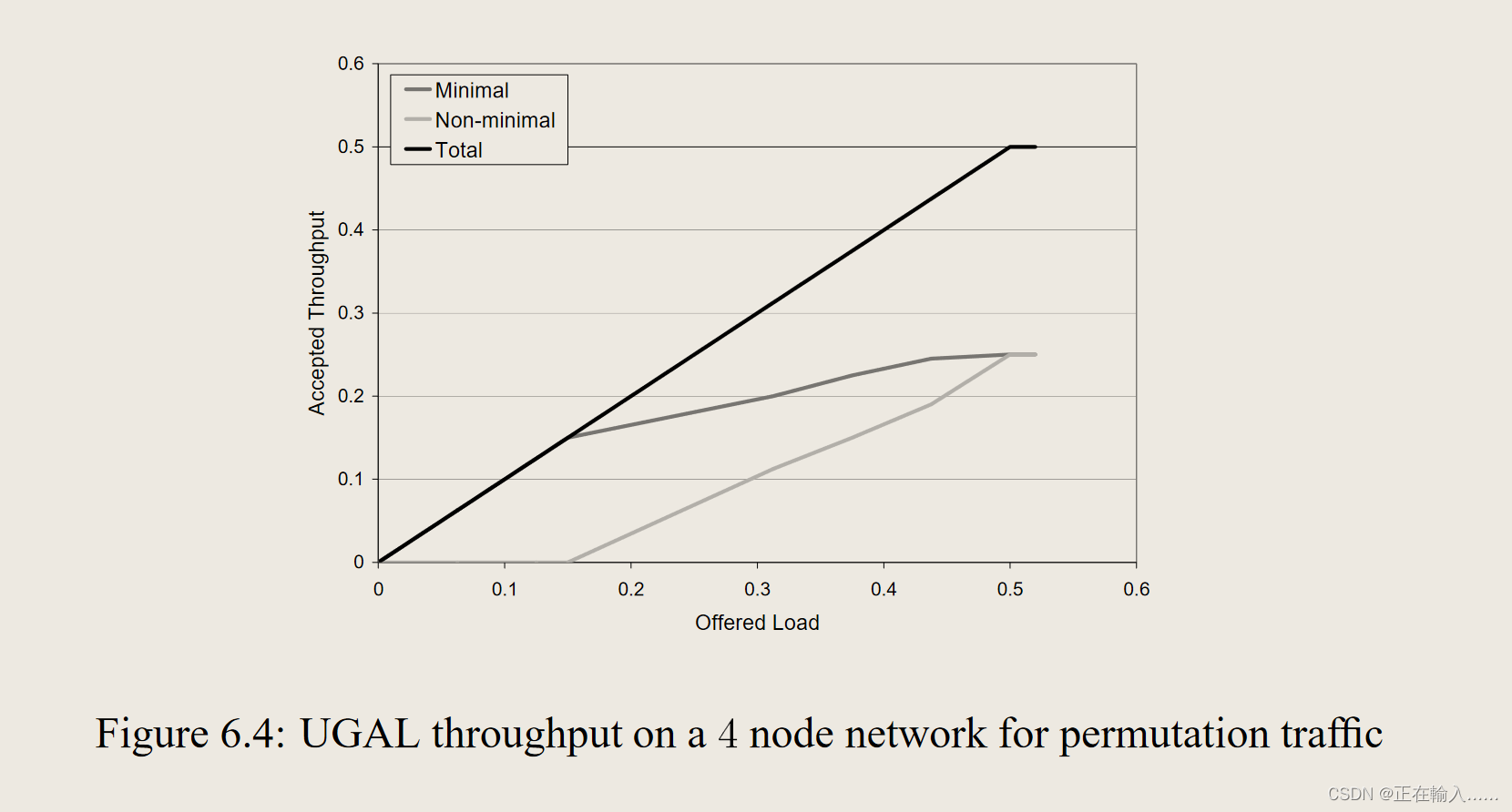
互连网络的负载平衡路由算法 (UGAL, Universal Globally Adaptive Load-Balancing 通用全局自适应负载平衡)
Universal Globally Adaptive Load-Balancing 通用全局自适应负载平衡 1. Motivation 动机2. 任意对称拓扑上的 UGAL3. 总结 Universal Globally Adaptive Load-Balancing 通用全局自适应负载平衡 之前的工作都是基于 torus 网络的负载平衡路由,而这篇文章的内容提出了一种适用于任意对称拓扑(

GMMCP Tracker:Globally Optimal Generalized Maximum Multi Clique Problem for Multiple Object Tracking
来源:CVPR2015 创新点: 数据关联是众多多目标跟踪方法的主干。在本文中,作者把数据关联问题公式化为一种广义的最大化多团问题(a Generalized Maximum Multi Clique problem,GMMCP),并且通过二值整数规划来解决。之前的工作假设我们的跟踪器要么在问题表述上简化,要么在问题优化上简化。然而,本文所提的GMMCP在这两个方面都没有简化。此外,还提出
【环境配置】Towards Globally Optimal Normal Orientations for Large Point Clouds
文章目录 一、所用环境二、环境配置 一、所用环境 windows 10 22H2(内部版本 19045.3693)该版本主要是为了兼容vs2022vs2022 professioncmakevcpkg 二、环境配置 1、安装vcpkg $ git clone https://github.com/microsoft/vcpkg$ .\vcpkg\bootstrap-vcp
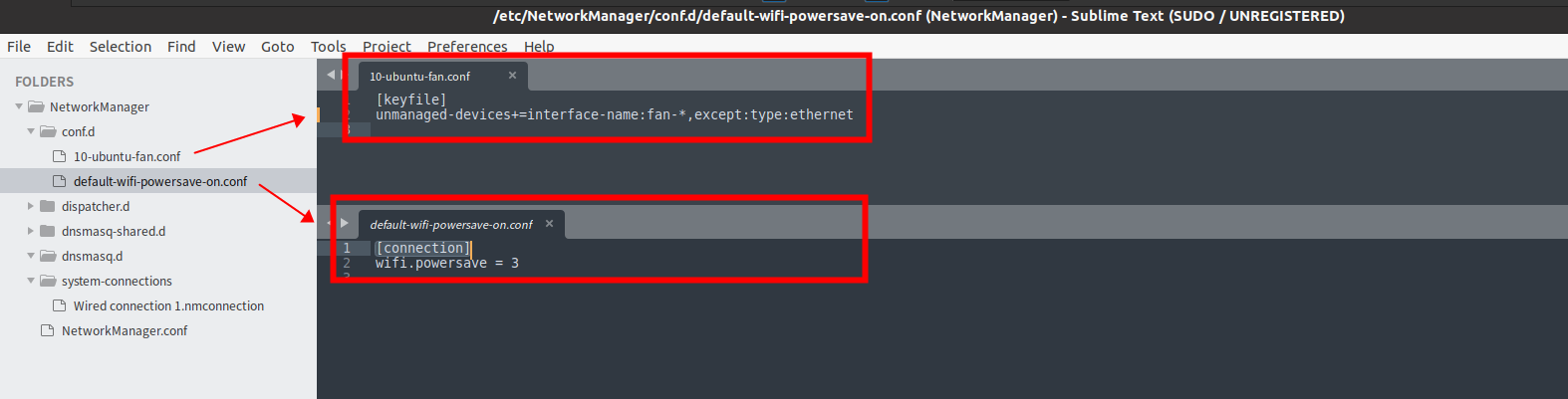
【ubuntu】网络管理:/usr/lib/NetworkManager/conf.d/10-globally-managed-devices.conf 该文件是什么文件,有什么用,如何使用 ?
10-globally-managed-devices.conf是NetworkManager的配置文件,位于/usr/lib/NetworkManager/conf.d/目录下。它用于配置NetworkManager在全局范围内管理的设备。 NetworkManager是一个在Linux系统中管理网络连接的守护进程。它负责自动检测和配置网络设备,包括有线连接、Wi-Fi、蓝牙等。10-glob
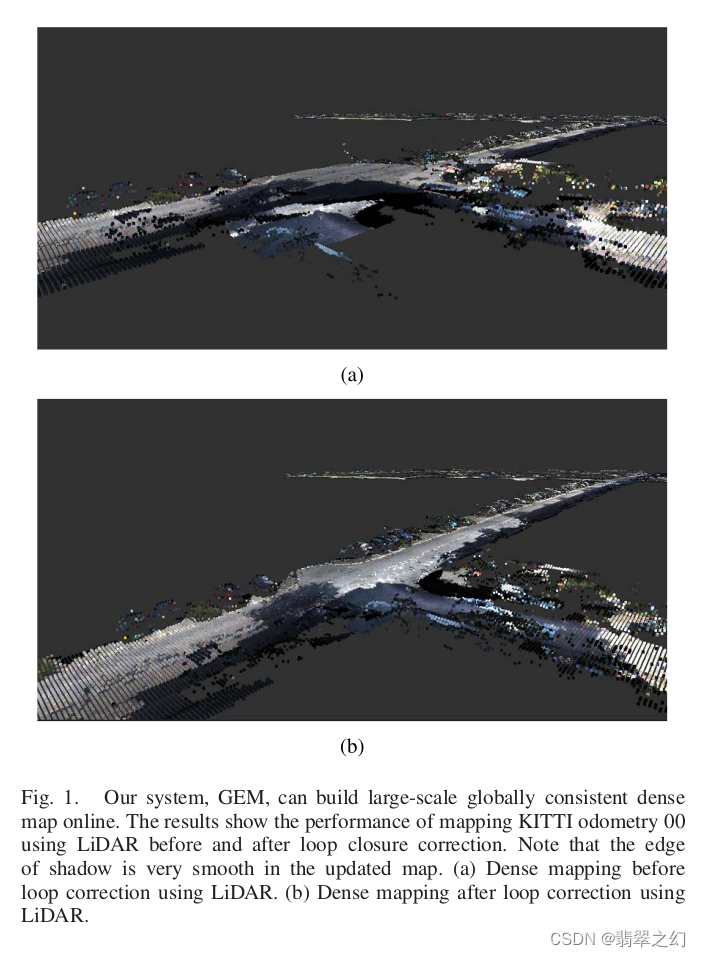
GEM: Online Globally Consistent Dense Elevation Mapping for Unstructured Terrai
由于栅格地图难以解决不平整环境的建图问题,高程图在室外环境得到了广泛应用。为了在建图过程中确保的全剧一致性。本文将全局高程图表示为一组子图的集合,通过变形子图相对位置来保证全局一致性,局部和全局建图分别在GPU和CPU上运行。项目地址:https://github.com/ZJU-Robotics-Lab/GEM 局部地图构建 融合多帧观测更新高程图,分析可行驶区域,检测动态物体。动态物体用

三维识别与位姿估计——Surafce Matching——细节解读:Model globally,Match locally
最近研究 Bertram Drost在2010年发表的一篇文章: model globally ,match locally:efficient and robust 3D object recognition 这篇文章基于点对特征,对刚性物体在三维场景中做识别并估计位姿。并且目前已经封装在了opencv库中,用起来很方便。 然而总体来说各个细节理解起来还是费了一些功夫的,网上其他关于这篇文

论文笔记Globally and Locally Consistent Image Completion
论文笔记Globally and Locally Consistent Image Completion 图1 Patch-based方法的示例图 Patch-based方法的不足:(1)Depend on low-level features;(2)Unable to generate novel objects;2)基于Context Encoder的图像补全,该方法基于深度学习生成相似的纹
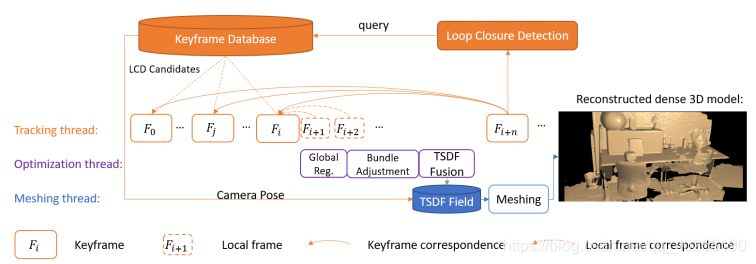
FlashFusion: Real-time Globally Consistent Dense 3D Reconstruction using CPU Computing
文章目录 系统结构相机定位TSDF建图有效体素块选择基于关键帧的优化 Mesh创建创建多边形法线计算 地图重组 系统结构 项目地址:http://www.luvision.net/FlashFusion/ (暂时还没有代码) 系统结构如上图所示,系统分为三个线程:1、跟踪线程。2、优化线程。3、Mesh生成线程。通过MILD闭环检测器来根据ORB特征点发现闭环。 定位:如果当
Globally and Locally Consistent Image Completion 论文及lua 代码解读
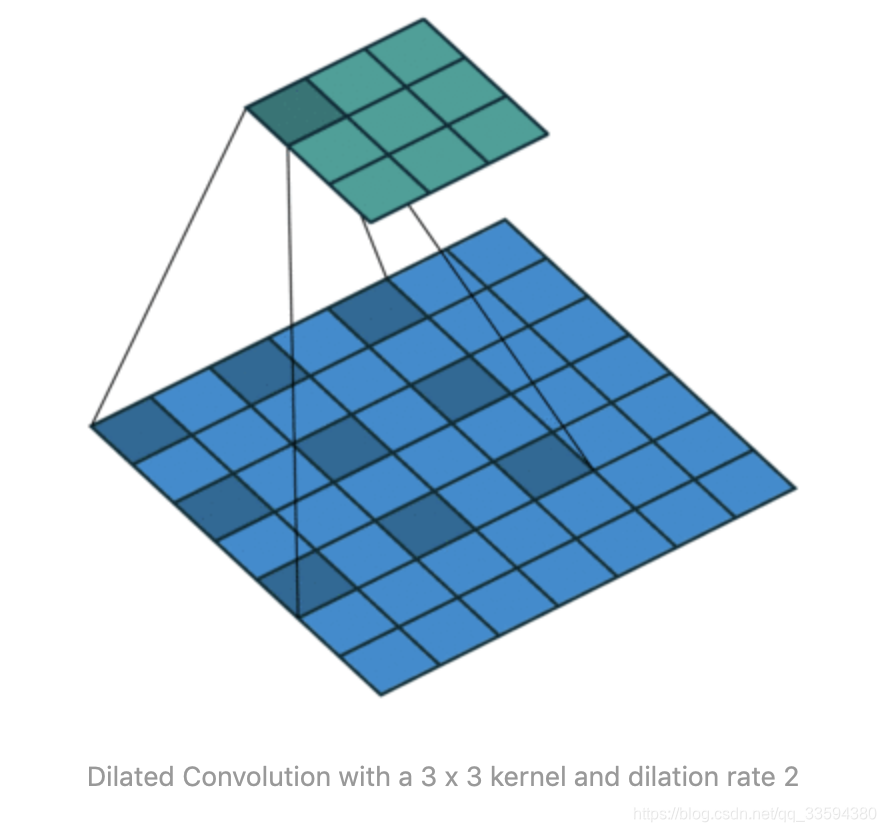
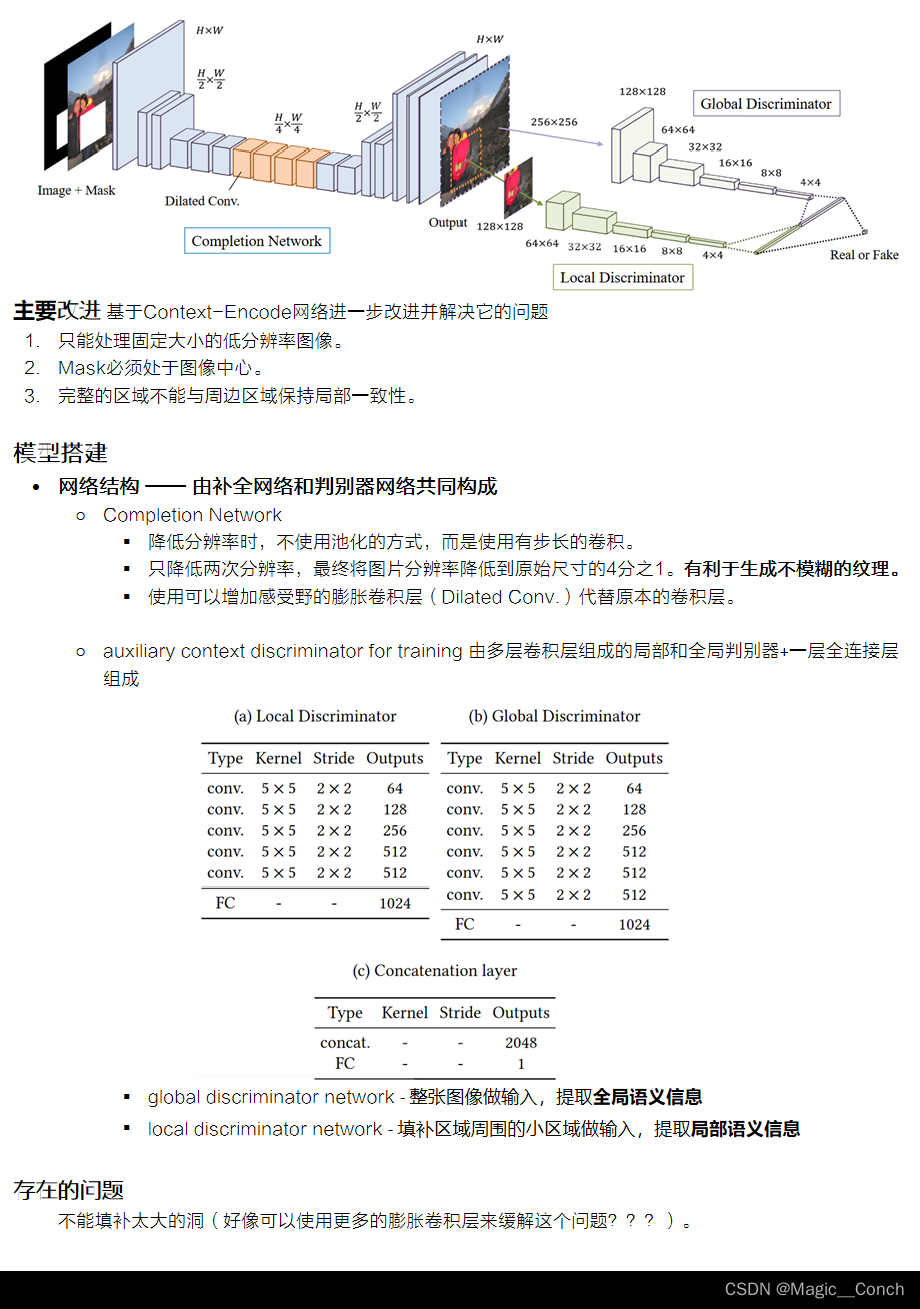
一、论文 1、论文思想 上一篇文章提到的Context encode 利用decoder 和encoder 来进行image inpainting,可以修复较大的图像缺失并使得恢复好的图像符合整幅图像的语义,但是修复好的图像存在局部模糊的问题,因此真实图像和利用inpainting 得到的图像肉眼清晰可辨。针对这个问题,SATOSHI IIZUKA 等提出了一个新的想法,即利用global d

Globally Optimal Toon Tracking
最近看了师公的一篇文章,果然偶尔看看传统算法的文章,才能对问题的本质有深刻的理解,特此记录,敬畏前人。 该任务的可视化例子如下: 👉原项目地址 1. Optical Flow 不能用于赛璐璐(cel)动画的原因 1️⃣ 不能保证动画的内容(运动)是物理上正确的; 2️⃣ 对象运动更剧烈(Choppy & Vigorous); 3️⃣ 动画对象缺乏充足的纹理。 2. 任务难点