本文主要是介绍三维识别与位姿估计——Surafce Matching——细节解读:Model globally,Match locally,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
最近研究 Bertram Drost在2010年发表的一篇文章:
model globally ,match locally:efficient and robust 3D object recognition
这篇文章基于点对特征,对刚性物体在三维场景中做识别并估计位姿。并且目前已经封装在了opencv库中,用起来很方便。
然而总体来说各个细节理解起来还是费了一些功夫的,网上其他关于这篇文章的博客,大多数是隔靴搔痒,简单翻译。起不了很大的辅助理解的作用。因此,我决定从各个细节处理的角度写一下。码起来备用。

一、什么是点对特征——PPF?
对于点云中的任意两点,其距离关系和方向关系(两点的法线方向)可以用来描述这一对点,并且是distinctive的。
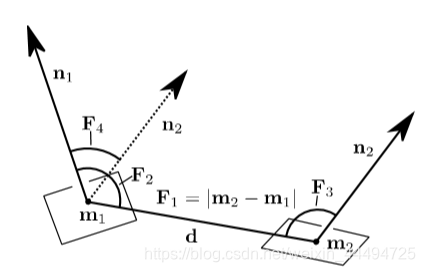
由此,我们定义一个四维向量F,来描述这一对点的PPF特征:

四维F包含一个长度,三个角度
F即POINT PAIR FEATURE
二、什么是model globally?如何操作?
model是预先做好的,用来匹配scene中的目标object。
m
这篇关于三维识别与位姿估计——Surafce Matching——细节解读:Model globally,Match locally的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





