consistent专题
白话解析:一致性hash算法 consistent hashing
以下内容转载自: 朱双印博客| 白话解析:一致性哈希算法 consistent hashing 原文地址:http://www.zsythink.net/archives/1182 在了解一致性哈希算法之前,最好先了解一下缓存中的一个应用场景,了解了这个应用场景之后,再来理解一致性哈希算法,就容易多了,也更能体现出一致性哈希算法的优点,那么,我们先来描述一下这个经典的分布式缓存的

【tensorrt】——could not find any supported formats consistent with input/output data types
tensorrt 在supportsFormatCombination函数中需要返回true bool supportsFormatCombination(int pos,const nvinfer1::PluginTensorDesc *inOut,int nbInputs, int nbOutputs) override{cout << "in support format co

一致性hash算法 - consistent hashing
1、 情景分析 前一篇博文分析了HashMap源码,HashMap在许多场景中作为存储数据的不二选择。 但是否使用HashMap就能解决所有在空间和时间的均衡问题?? 下面考虑使用HashMap的二个极端情景: 原来有 N 台Server,所有数据通过一种 hash 算法(以hash(key)%N为例)映射到 N 台Server 中。 情景一:其中的 M 台服务器失效,那

Foundation of Machine Learning 笔记第二部分——Guarantees for Finite Hypothesis Sets in Consistent Case
前言 注意事项: 这个系列的文章虽然题为书本《Foundation of Machine Learning》的读书笔记,但实际我是直接对书本的部分内容进行了个人翻译,如果这个行为有不妥当的地方,敬请告知。由于知识面限制,部分名词的翻译可能存在错误,部分难以翻译的名词保留英文原词。为了防止误导大家,在这里声明本文仅供参考。本文基本翻译自《Foundation of Machine Learnin

【真实世界图像超分】《Frequency Consistent Adaptation for Real World Super Resolution》2012 Nanjing University
摘要:最近的基于深度学习的超分方法在已知退化核图像上已经展现出卓越的性能。但是这些方法往往在真实世界场景下表现不尽如人意,因为作为训练样本的LR图像通常来自于理想退化核(bicubic下采样),它们不同于真实源图像域。训练样本的LR图像和真实源图像的领域差异在频率密度上被明显观察到。这一点启示我们显示地缩小由不正确的退化造成的领域差异。我们设计了一个频率一致性模块,确保在真实世界场景应用已经存在的

Oracle 有关 Consistent gets 的测试
一.Consistentgets 说明 我们使用autotrace 查看执行计划和统计信息时,会显示类似如下信息: 0 recursive calls :递归调用。一般原因:dictionary cache未命中;动态存储扩展;PL/SQL语句 0 db block gets :bufer中读取的block数量,用于insert,upda


【计算机图形学】3D Implicit Transporter for Temporally Consistent Keypoint Discovery
对3D Implicit Transporter for Temporally Consistent Keypoint Discovery的简单理解 文章目录 1. 现有方法限制和文章改进2. 方法2.1 寻找时间上一致的3D特征点2.1.1 3D特征Transporter2.1.2 几何隐式解码器2.1.3 损失函数 2.2 使用一致特征点的操纵 1. 现有方法限制和文章改
db block gets (current gets) VS. consistent gets
当前读(db block gets / current gets)与一致读(consistent gets)统称为逻辑读,逻辑读可能需要物理读把块读到cache中。 当前读指读现在已提交了的数据,一般在全表扫描读数据字典、更新、删除时发生。 一致读指读发出SELECT的那个时间点SCN的数据,一般在查询(增删改都可能有隐式查询)时发生。 db block gets are block
Eventually Consistent(最终一致性)
应该说搞分布式系统必读的文章了,转过来,这是2008年12月Werner revise过的版本,先贴上内容简介: 分布式系统的CAP理论 CAP理论(data consistency, system availability, and tolerance),也就是数据一致性,系统可用性和网络分区容错性,在一个分布式系统中CAP是不能同时保证的,最多只能同时满足两个。 如果一个系统不必考虑网络分

TypeError: Cannot create a consistent method resolution order (MRO) for bases WampTest, MusicTest
报错位置 MusicTest类继承VoiceTest类 VoiceTest继承WampTest 报错:TypeError: Cannot create a consistent method resolution order (MRO) for bases WampTest, MusicTest 在网上搜了一下,了解到python当中 新式类多重继承原则:广度优先,从左到右 当需要在继
一致性hash算法 - consistent hashing .
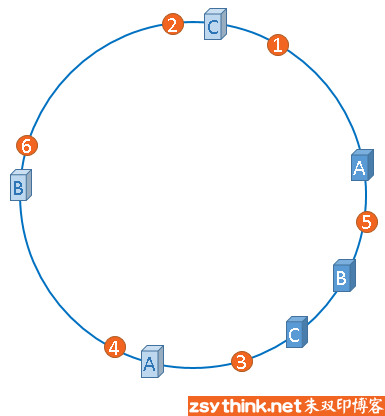
consistent hashing 算法早在 1997 年就在论文 Consistent hashing and random trees 中被提出,目前在 cache 系统中应用越来越广泛; 1 基本场景 比如你有 N 个 cache 服务器(后面简称 cache ),那么如何将一个对象 object 映射到 N 个 cache 上呢,你很可能会采用类似下面的通用方法计算 object
CycleGAN(Cycle-Consistent Generative Adversarial Network)
CycleGAN(Cycle-Consistent Generative Adversarial Network)是一种用于图像到图像转换的深度学习模型。其主要目标是学习两个域之间的映射,例如将马的图像转换为斑马的图像,而无需配对的训练数据。以下是CycleGAN图像到图像转换的关键知识点总结: 1.生成对抗网络(GAN): 2.CycleGAN基于生成对抗网络结构,其中包含生成器(Gener
【tensorrt】——could not find any supported formats consistent with input/output data types
tensorrt 在supportsFormatCombination函数中需要返回true bool supportsFormatCombination(int pos,const nvinfer1::PluginTensorDesc *inOut,int nbInputs, int nbOutputs) override{cout << "in support format co
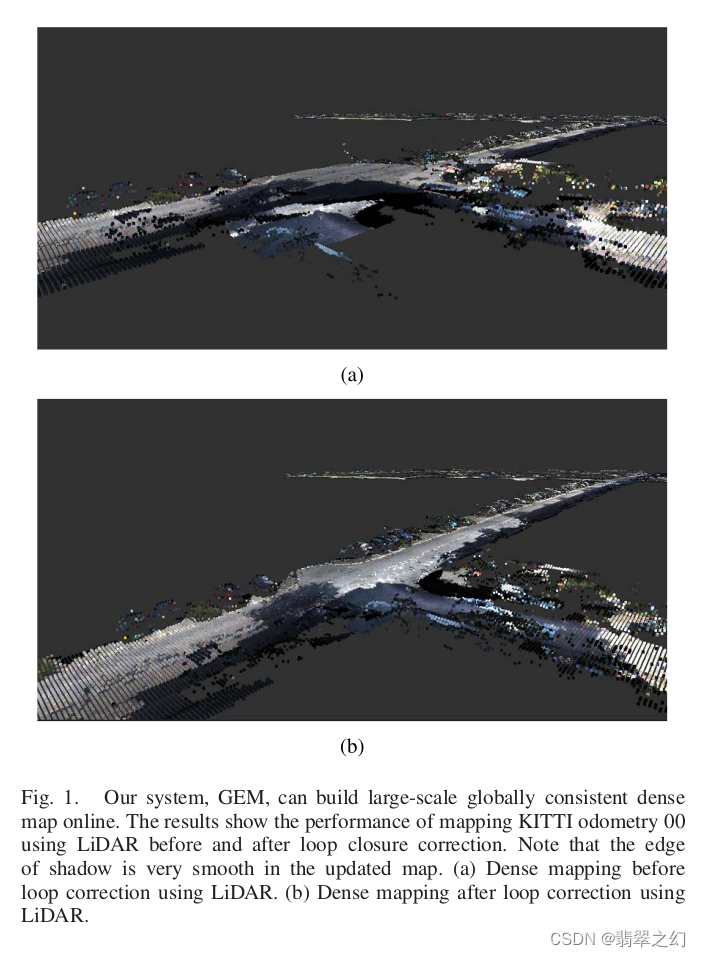
GEM: Online Globally Consistent Dense Elevation Mapping for Unstructured Terrai
由于栅格地图难以解决不平整环境的建图问题,高程图在室外环境得到了广泛应用。为了在建图过程中确保的全剧一致性。本文将全局高程图表示为一组子图的集合,通过变形子图相对位置来保证全局一致性,局部和全局建图分别在GPU和CPU上运行。项目地址:https://github.com/ZJU-Robotics-Lab/GEM 局部地图构建 融合多帧观测更新高程图,分析可行驶区域,检测动态物体。动态物体用

论文笔记Globally and Locally Consistent Image Completion
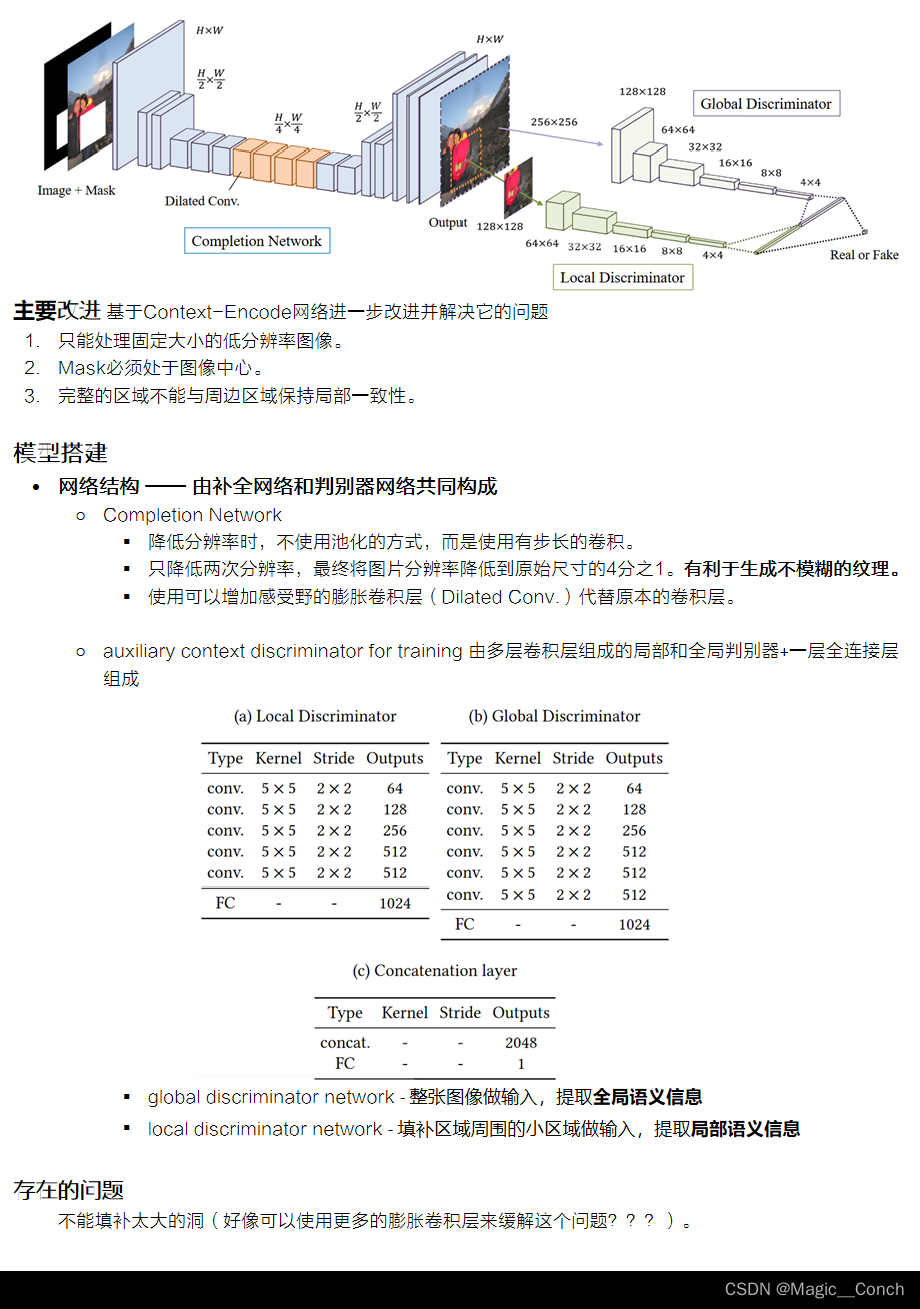
论文笔记Globally and Locally Consistent Image Completion 图1 Patch-based方法的示例图 Patch-based方法的不足:(1)Depend on low-level features;(2)Unable to generate novel objects;2)基于Context Encoder的图像补全,该方法基于深度学习生成相似的纹
FlashFusion: Real-time Globally Consistent Dense 3D Reconstruction using CPU Computing
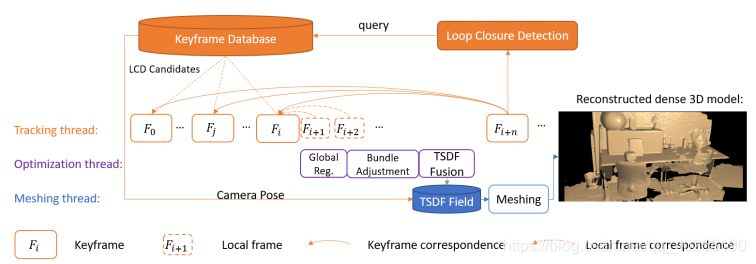
文章目录 系统结构相机定位TSDF建图有效体素块选择基于关键帧的优化 Mesh创建创建多边形法线计算 地图重组 系统结构 项目地址:http://www.luvision.net/FlashFusion/ (暂时还没有代码) 系统结构如上图所示,系统分为三个线程:1、跟踪线程。2、优化线程。3、Mesh生成线程。通过MILD闭环检测器来根据ORB特征点发现闭环。 定位:如果当
Globally and Locally Consistent Image Completion 论文及lua 代码解读
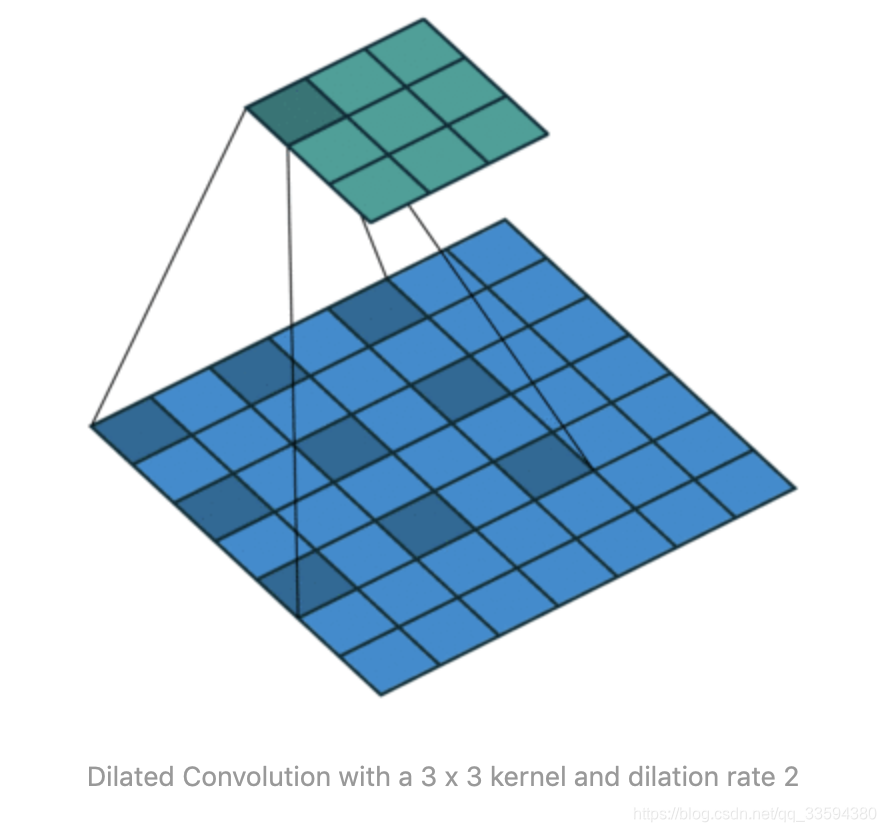
一、论文 1、论文思想 上一篇文章提到的Context encode 利用decoder 和encoder 来进行image inpainting,可以修复较大的图像缺失并使得恢复好的图像符合整幅图像的语义,但是修复好的图像存在局部模糊的问题,因此真实图像和利用inpainting 得到的图像肉眼清晰可辨。针对这个问题,SATOSHI IIZUKA 等提出了一个新的想法,即利用global d
语音合成论文优选:Fre-GAN: Adversarial Frequency-consistent Audio Synthesis
声明:语音合成论文优选系列主要分享论文,分享论文不做直接翻译,所写的内容主要对文章简略概括。如有转载,请标注来源。 欢迎关注微信公众号:低调奋进 低调奋进迎来新的伙伴加入,本文由迎风飞扬进行文章的分享,欢迎更多伙伴的加入。 Fre-GAN: Adversarial Frequency-consistent Audio Synthesis 此篇文章是Department of

【论文笔记】cycleGAN:《Unpaired Image-to-Image Translation using Cycle-Consistent Adversarial Networks》
本文是 cycleGAN 论文《Unpaired Image-to-Image Translation using Cycle-Consistent Adversarial Networks》的阅读笔记。 论文一上来就给出了该图,从图中可以看到 cycleGAN 可以从源域图像转换为目标域的图像,并保留源域图像的细节,还可以从目标域图像转换回源域图像。 一、摘要 cycleGAN 的主要贡献
![[論文筆記] Monocular Pose Estimation of 3D Objects using Temporally Consistent Local Color Histograms](https://img-blog.csdn.net/20180914044107931?watermark/2/text/aHR0cHM6Ly9ibG9nLmNzZG4ubmV0L0Rlbm5pc19MZWVf/font/5a6L5L2T/fontsize/400/fill/I0JBQkFCMA==/dissolve/70)
[論文筆記] Monocular Pose Estimation of 3D Objects using Temporally Consistent Local Color Histograms
Real-Time Monocular Pose Estimation of 3D Objects using Temporally Consistent Local Color Histograms 這是小弟第一篇論文筆記,將來應該會每週更新一篇論文筆記,自己還很菜,文中有些基礎部分知識還沒理解的部分會略過,有機會的話會再補足,若內文有錯誤還請各位多多包涵不吝指正。 背景介紹: 實踐中
![[推荐]memcached全面剖析–4. memcached的分布式算法:Consistent Hashing](http://tech.idv2.com/wp-content/uploads/2008/07/memcached-0004-05.png)
[推荐]memcached全面剖析–4. memcached的分布式算法:Consistent Hashing
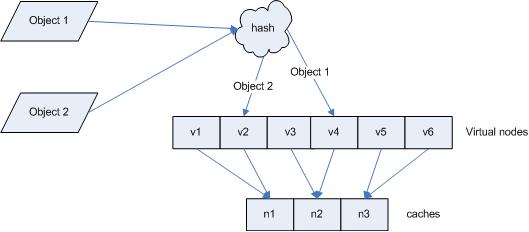
关键字: memcached分布式, consistent hashing 第2次 、 第3次 由前坂介绍了memcached的内部情况。本次不再介绍memcached的内部结构,开始介绍memcached的分布式。 memcached的分布式 memcached的分布式是什么意思? Cache::Memcached的分布式方法 根据余数计算分散 根据余数计算分散的缺点 C
![[23] SweetDreamer: Aligning Geometric Priors in 2D Diffusion for Consistent Text-to-3D](https://img-blog.csdnimg.cn/1ce2c5e53abb4414a8704faa5a00692a.png)
[23] SweetDreamer: Aligning Geometric Priors in 2D Diffusion for Consistent Text-to-3D
SWEETDREAMER: ALIGNING GEOMETRIC PRIORS IN 2D DIFFUSION FOR CONSISTENT TEXT-TO-3D pdf | project 目录 Method Alignning Geometric Priors in 2D Diffusion Integration into Text-to-3D Text-to-3D Ge

经典文献阅读之--Online Extrinsic Camera Calibration for Temporally Consistent IPM (IPM外参标定)
0. 简介 对于视觉而言,如何使用鸟瞰图来完成车道线的识别和标定是非常重要的,对于鸟瞰图来说,其实有很多种,之前读者的博客中也已经提到过《逆透视变换(IPM)多种方式及代码总结》、《IPM 鸟瞰图公式转换与推导》。这个当然内容还是不太详细,对于各位想要复现难度会比较大,这个时候可以看一下《单应矩阵的推导与理解》这篇文章的详细推导。其实只需要知道精确的外参和内参,以及相机的高度,以及期望的W和H(
《Unsupervised Scale-consistent Depth ...》论文笔记
这篇笔记是关于3篇文章的合集,它们分别是: 《Unsupervised Scale-consistent Depth and Ego-motion Learning from Monocular Video》《Unsupervised Scale-consistent Depth Learning from Video》《Auto-Rectify Network for Unsupervised