elevation专题
翻译《The Old New Thing》- How do I mark a shortcut file as requiring elevation?
How do I mark a shortcut file as requiring elevation? - The Old New Thing (microsoft.com)https://devblogs.microsoft.com/oldnewthing/20071219-00/?p=24103 Raymond Chen 2007年12月19日 如何将快捷方式标记为需要提升权限

android:elevation=“10dp“
这个代码片段中的 android:elevation="10dp" 是用来设置 Android 视图(View)的 Z 轴高度的属性。这个属性影响了视图的阴影和浮动效果。具体来说,它会使得视图在 Z 轴方向上相对于其他视图更高,从而产生阴影效果,使得该视图看起来像是浮在其他视图之上。 elevation 属性的值通常是以像素(dp 或 dip)为单位的浮点数,表示视图的高度。较大的值会产生更明显

elevation包,SRTM30、90mDEM快速下载
官网 官网地址 项目安装 pip install elevation 安装检查 $ eio selfcheckYour system is ready. 请注意,从 elevation v1.1 开始,官方仅支持 Python 3。 要获得支持 Python 2 的最新版本,请使用 pip install elevation=1.0.6。 命令行用法 1. 30m dem下
ANYbotics Elevation Mapping 高程栅格地图创建(ROS)——苏黎世联邦理工学院
ETH高程地图ROS软件包 elevation mapping 地址:高程栅格地图 该软件包已经在ROS Kinetic和Ubuntu 16.04下进行了测试。 安装 依赖 该软件基于机器人操作系统(ROS),需要先安装。此外,以机器人为中心的高程映射依赖于以下软件: 网格地图(移动机器人的网格地图库) kindr(机器人的运动学和动力学库) kindr_ros(针对kindr的RO

android:elevation 属性, 5.0以上才可以用
android 官方api描述如下: setElevation void setElevation (View view, float elevation) Sets the base elevation of this view, in pixels. Parameters view View elevation float 也就是一个设置高度的属性,
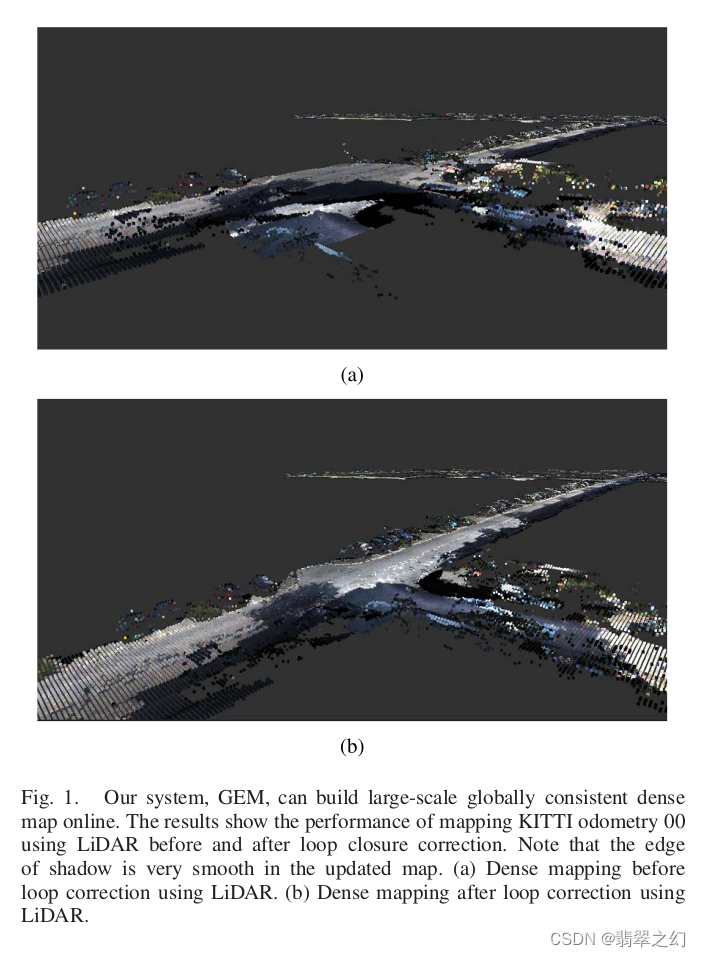
GEM: Online Globally Consistent Dense Elevation Mapping for Unstructured Terrai
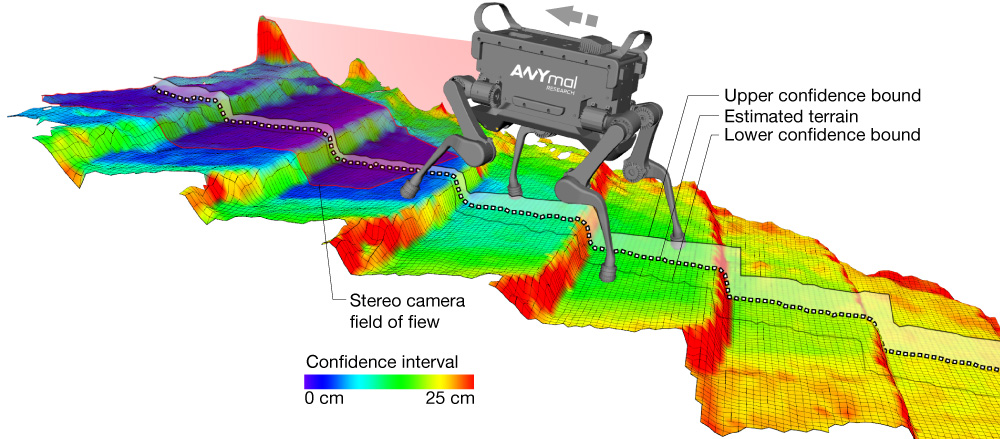
由于栅格地图难以解决不平整环境的建图问题,高程图在室外环境得到了广泛应用。为了在建图过程中确保的全剧一致性。本文将全局高程图表示为一组子图的集合,通过变形子图相对位置来保证全局一致性,局部和全局建图分别在GPU和CPU上运行。项目地址:https://github.com/ZJU-Robotics-Lab/GEM 局部地图构建 融合多帧观测更新高程图,分析可行驶区域,检测动态物体。动态物体用
elevation mapping算法1之Ubuntu18.04+ROS-melodic编译安装elevation mapping高程图及示例运行
文章目录 0 引言1 安装依赖1.1 grid map1.2 Eigen1.3 kindr1.4 Point Cloud Library (PCL) 2 编译和问题解决3 运行示例3.1 turtlesim3_waffle_demo3.2 simple_demo 和 Ground Truth Demo 0 引言 苏黎世开源的elevation mapping指的是苏黎世联邦理工