本文主要是介绍ANYbotics Elevation Mapping 高程栅格地图创建(ROS)——苏黎世联邦理工学院,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
ETH高程地图ROS软件包
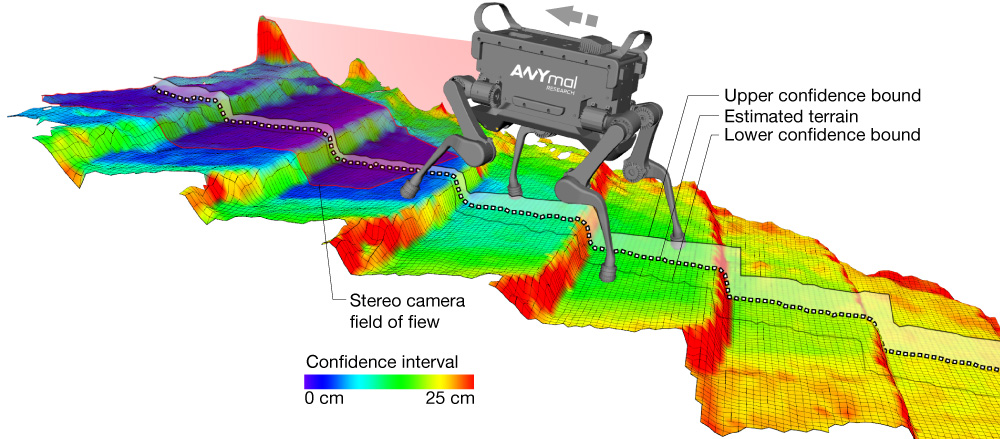
elevation mapping
地址:高程栅格地图
该软件包已经在ROS Kinetic和Ubuntu 16.04下进行了测试。
安装
依赖
该软件基于机器人操作系统(ROS),需要先安装。此外,以机器人为中心的高程映射依赖于以下软件:
网格地图(移动机器人的网格地图库)
kindr(机器人的运动学和动力学库)
kindr_ros(针对kindr的ROS包装器)
点云库(PCL)(点云处理)
PCL安装教程
若在依赖库安装过程中有出现删除大量软件包则可跳过该指令。
如果运行,就需要重新安装ros。
特征(线性代数库)
在安装PCL库所需依赖的过程中就已经运行了安装了eigen
sudo apt-get install libeigen3-dev
编译
//Install wstool and rosdep.
sudo apt-get update
sudo apt-get install -y python-wstool python-rosdep ninja-build
//elevation mapping
mkidr elevation mapping
cd elevation mapping/src
git clone https://github.com/anybotics/elevation_mapping.git
cd ../
//若将依赖与elevation mapping放在同一工作空间,则要用多种编译器编译
catkin_make_isolated --install --use-ninja
编译过程中可能出现缺少文件的报错。找到文件所在的ROS包,进行安装即可。
例如缺少costmap_2d
sudo apt-get install ros-kinetic-costmap-2d
这篇关于ANYbotics Elevation Mapping 高程栅格地图创建(ROS)——苏黎世联邦理工学院的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





