anybotics专题
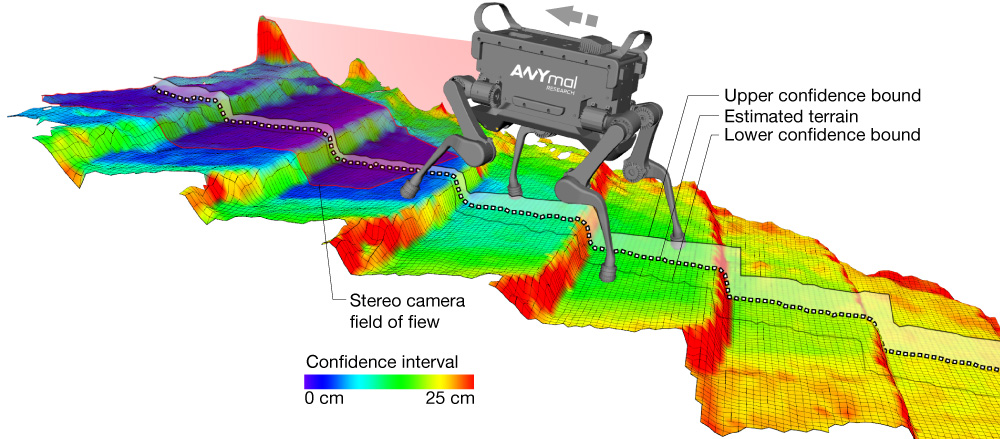
ANYbotics Elevation Mapping 高程栅格地图创建(ROS)——苏黎世联邦理工学院
ETH高程地图ROS软件包 elevation mapping 地址:高程栅格地图 该软件包已经在ROS Kinetic和Ubuntu 16.04下进行了测试。 安装 依赖 该软件基于机器人操作系统(ROS),需要先安装。此外,以机器人为中心的高程映射依赖于以下软件: 网格地图(移动机器人的网格地图库) kindr(机器人的运动学和动力学库) kindr_ros(针对kindr的RO