苏黎世专题

QIIME2宏基因组学教程--2024年春季莱顿和苏黎世教程
最近在qiime2论坛发现有人发布了qiime2宏基因组的教程,这里分享一下,只是alpha版本,不成熟,大家谨慎了解。qiime2的专用格式对于折腾宏基因组还是有点不妥的,个人观点,但是好在他能让分析标准化,可追溯的话,我觉得还是利大于弊的。 地址在这:宏基因组学与QIIME 2 - 2024年春季莱顿和苏黎世教程 - 宏基因组分析与QIIME2 警告 使用 QIIME 2 进行的宏基因组学分

模仿蜘蛛工作原理 苏黎世联邦理工学院研发牛油果机器人可在雨林树冠穿行
对于野外环境生物监测的研究人员来讲,收集生物多样性数据已成为日常工作重要组成部分,特别是对于热带雨林的茂密树冠当中活跃着非常多的动物、昆虫与植物。每次勘察都需要研究人员爬上茂密树冠收集数据,一方面增加了数据收集难度,而另一方面危险系数也随之增加。 传统的多旋翼无人机并不适合在茂密的雨林中穿梭,茂密的树冠限制了无人机的活动区域,旋翼也非常容易被树冠枝叶缠住。此外,树冠的高矮,粗细以及纹理的不同,也

【苏黎世联邦理工博士论文】深度强化学习的体系结构
来源:专知本文为论文介绍,建议阅读5分钟本文不关注实证结果,而是从研究反向传播在架构设计和训练中的简单数学含义开始。 自从深度学习和深度强化学习出现以来,已经有大量的经验成功地利用某种人工神经网络来解决给定的优化问题。然而,许多公司的内部运作方式只被人们模糊地了解,并隐藏在成功的故事中。通过揭示各种含义,这篇论文试图建立一个理解为什么某些神经网络架构设计工作,以及关键的是为什么其他的不能
苏黎世联邦理工学院博士招生,全球导航卫星系统(GNSS)数据分析相关的机器学习领域...
(图片来自苏黎世联邦理工学院官网) 团队介绍 Chair of Space Geodesy,是一个围绕 Benedikt Soja 教授新成立的研究小组,专注于机器学习技术在大地测量问题上的应用,包括自动数据处理和大规模时间序列分析。 职位描述 寻找一个博士生,研究如何将机器学习应用于全球导航卫星系统数据分析。入职者将开发和实施机器学习算法,对全球导航卫星系统观测数据进行精细处理,以估计最高

瑞士苏黎世联邦理工学院ETH Zurich:记录马匹不同步态和活动测量
——用于动物测量研究的数据记录仪:虹科MSR145 对马匹的运动活动和休息行为的观察通常用于评估其饲养和管理的安全与健康。研究测试了虹科MSR145数据记录仪在判别马匹步态方面的适用性。 作为直接观察这一耗时方法的替代方案,使用计步器是自动化活动测量的常用方法。然而,计步器的一个缺点是数据汇总而导致信息丢失,无法区分不同的步态。因此,苏黎世联邦理工学院农业科学研究所行为、健康和动物福利研
CSC公派|环境学在读博士赴瑞士苏黎世联邦理工学院联合培养
E同学拟申报CSC联合培养博士生项目,因DIY申请无果,故希望我们为其申请到除美国外的世界名校。最终我们用瑞士苏黎世联邦理工学院(2024年QS世界大学排名第7)的邀请函,助E同学顺利通过了学校的初筛和CSC的选拔,如期出国。 E同学背景: 申请类型: CSC联合培养博士 工作背景: 无 教育背景: 在读博士 研究方向: 环境学 学术背景: 一篇SCI 申请难点: 除美国外的
CSC联合培养|公共管理博士赴世界名校瑞士苏黎世联邦理工学院
A同学拟申报CSC联合培养博士项目,要求到专业契合的世界知名高校。最终我们用世界大学排名第7的瑞士苏黎世联邦理工学院邀请函,助其顺利获批CSC,并如期出国。 A同学背景: 申请类型: CSC联合培养博士 工作背景: 无 教育背景: 在读博士 研究方向: 公共管理/城市管理 学术背景: 2篇SCI文章 申请难点: 要求世界名校 申请过程: A同学博士在读,拟申报今年的国家留
ANYbotics Elevation Mapping 高程栅格地图创建(ROS)——苏黎世联邦理工学院
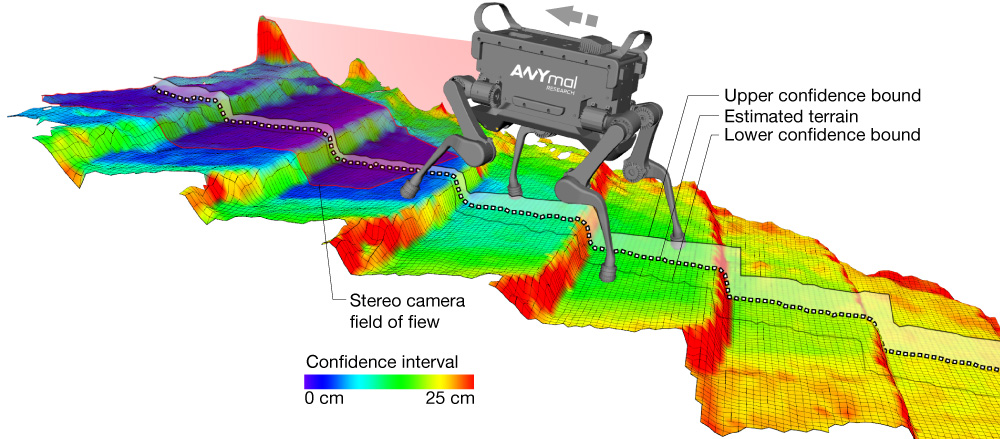
ETH高程地图ROS软件包 elevation mapping 地址:高程栅格地图 该软件包已经在ROS Kinetic和Ubuntu 16.04下进行了测试。 安装 依赖 该软件基于机器人操作系统(ROS),需要先安装。此外,以机器人为中心的高程映射依赖于以下软件: 网格地图(移动机器人的网格地图库) kindr(机器人的运动学和动力学库) kindr_ros(针对kindr的RO

ethz(苏黎世联邦理工学院)机器人系统实验室开源库
系列文章目录 文章目录 系列文章目录前言一、开源库1.1 OCS2 - Optimal Control for Switched Systems1.2 RSLGym - 强化学习框架1.3 ELMO Ethercat SDK1.4 Kindr - 机器人运动学和动力学1.5 Grid Map - 用于移动机器人制图的通用网格地图库1.7 Elevation Mapping - 用于崎岖